はじめに
Turing株式会社 Vehicleチーム エンジニアの猪狩です。主に車載ソフトウェア、車体制御を担当しております。
Vehicleチームでは、自社開発したEVを2028年に量産開始することを目標に、車両を一から開発しているチームです。Turingは、自動運転のシステムだけではなく、オリジナルの車両を開発しています。完全自動運転EVを販売する完成車メーカーになることを目指しています。
本記事より始まる連載記事では、自動車にとって最も基本的な機能である、「走る」「曲がる」「止まる」のうち、「曲がる」機能を司る電動パワーステアリング(EPS)を開発する様子を紹介します。記事を通して「曲がる」機能を車の内部まで深堀りして見ていくことで、自動運転システム単体だけでなく車両まで一気通貫で開発する様子を紹介します。
電動パワーステアリング(EPS)とは?
最近の自動車の大半には、運転手がハンドルを回すときに、その力をモーターでアシストする機能が搭載されています。これが電動パワーステアリングです。実際に車の電源を落とした状態でハンドルを回してみると、普段よりもかなりハンドルが重たいことがわかると思います。本来これだけあるハンドルの重さが、EPSシステムによって軽減されて、運転しやすくなっているのです。
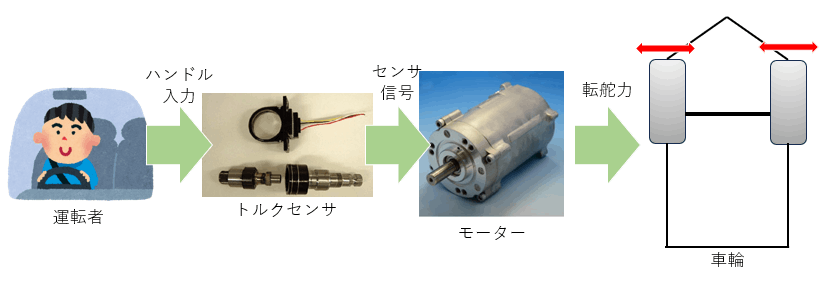
ハンドルの回転は、ステアリングシャフトと呼ばれる軸と連動しています。これが回転するとラックピニオンギアと呼ばれる歯車構造によって横方向の動きに変換され、車輪が左右に動く構造になっています。そして、運転手がハンドルを回そうとすると、トルクセンサがその力を検知して、モーターがステアリングシャフトの回転をアシストする仕組みになっています。EPSシステムでは、ハンドルと車輪は機械的に繋がっているものの、電気で動いています。つまり、ハンドルは「半分機械、半分コントローラー」のような立ち位置になっているのです。
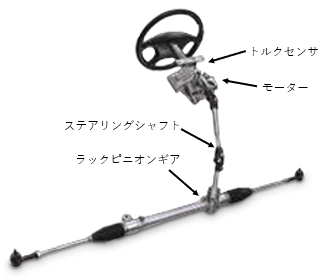
(ステアリング | 自動車補修用製品 | 商品情報 | ベアリングのKoyo(ジェイテクト) (jtekt.co.jp)より引用)
このEPSのモーターの出力によって、運転手の操舵感は大きく変わってきます。したがって、EPSのモーターの制御は、車そのものの商品性に直結するもので、自動車メーカーやEPSのサプライヤーのこだわりどころになります。
たとえば、低速域では駐車等ハンドルを大きく回す操作がしやすいように強めの出力をかけ、高速域では運転手に安心感を与えるため、出力を弱めてハンドルを重めにする、といった複雑な制御が行われます。
EPSと自動運転
このEPSですが、自動運転システムと接続すればもちろんシステムから車を操舵することができます。実は既存の車を自動運転車にするために、新しいアクチュエータを搭載する必要はないのです。実際、最近のADAS(先進運転支援システム)に搭載されているlane keep機能は、このEPSのモーターを動かすことによって操舵をしています。
話をちょっと変えて、開発用に既存の車を改造して自動運転車を作る、となった場合どのようなアプローチがありえるか考えたいと思います。
ひとつ考えられる手法は、トルクセンサから出力される信号の偽物をつくり、それでモーターに指示信号を出す手法です。言い方を変えると自動運転システムが運転手のフリをするシステムです。この手法では偽の信号として2本ほど適切なアナログ信号を生成すればよく、比較的簡単に実装できます。実際、Turingの初期のプロジェクトでもこの手法を用いていました。
(budapestと呼ばれる、E2E 自動運転AIで私用地をくるくる回るプロジェクトです。興味のある方はこちらの記事をご参照ください。)

一方で、このような手法で自動運転システムを開発した場合問題になるのが、先述した運転車の操舵感向上のための複雑な味付けです。複雑な味付けはすなわち複雑なブラックボックスとなってしまい、制御性が悪くなってしまいます。
そもそも自動運転車であるという前提を置いた場合に、運転者の操舵感向上のための制御は不要であり、EPSの制御に求められる要件も大きく変わってくるはずです。優れた自動運転機能によるよりよい移動体験を作るには、EPSに対する深い理解が必要なわけです。
EPSを取り出してみる
それでは、実際の車体に搭載されているEPSのモーターを取り出してみましょう。今回用いる車体はトヨタのミニバン、アルファード30系です。

余談ですが、この車体はLLM(Large Language Model)を自動運転システムに搭載して車を動かすプロジェクトで用いたものです。興味のある方はこちらの記事もご参照ください。
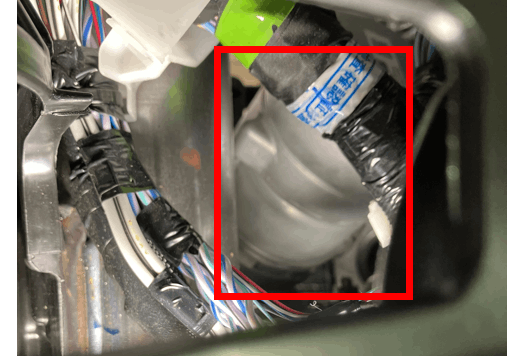
車のインパネの部分を剥がしていくと、このようにモーターの部分が見えてきます。写真の赤枠で囲っている部分の円筒体がEPSのモーターです。
そしてこちらが、取り出してきたEPSのモーターモジュールになります。モーター本体とそれを制御する電子基板が一つにまとまっている、いわゆる機電一体型の構成を取っています。この機電一体化は最近の自動車部品のトレンドで、余分なワイヤーハーネスを削減したり、部品のスペースを節約する効果があります。

おわりに
本記事では、EPSシステムについて概説し、実際の車体からEPSのモータを取り出してみました。普段みなさんが運転している車のハンドルの裏には、実はこんなものが隠れているのです。次回以降の記事では、このモーターモジュールについている制御基板を剥がして、自前の基板と制御でモーターを動かし、もとの車体に取り付けて走らせようと思います。
TuringのVehicleチームでは、2028年の量産開始に向けて車両を開発しています。
自動車の業界は、EV化、自動運転化に伴って100年に1度の大変革が起こるとも言われています。私はこのような変革の時期に、ゼロベースで自動車を開発することの意義を深く感じております。
また私自身はもともと東大のRoboTech(ロボコンサークル)でモノづくりをやってきましたが、Turingには自動車OEM企業や部品メーカー出身のエンジニアの方が数多くジョインしてきています。Turingにご興味を持たれた方は、Turing公式サイトや採用情報をご覧ください。TwitterのDMも解放していますので、本記事に関する質問、感想等は猪狩(@IgariKoki)までお寄せください。

Discussion