PID制御の基礎・応用
このスクラップはZennの本に移行しました
PID制御とは
PID制御(ピーアイディーせいぎょ、Proportional-Integral-Differential Controller、PID Controller)は、制御工学におけるフィードバック制御の一種である。出力値と目標値との偏差、その積分、および微分の3つの要素によって、入力値の制御を行う方法である。[1]
PID制御とは出力値を目標値に一致させる, フィードバック制御の一種である.
古典制御の一種であるものの, 実装が簡単でありながら安定性・応答性がよいため非常によく使われている.
古くから使用されているため, 文献が多数あり実績のある情報を得やすい.
またPID制御を改良し, 性能を良くしたものも多数提案されている.
世の中の多くのシステムはPID制御で動いている.
対象読者
- C言語やPythonなどの使用経験があり, プログラミングに対して一定の理解がある人
- PID制御について詳しく知りたい人
- 制御工学に興味がある人
この記事で示すこと
-
基礎編
- フィードバック制御の概要
- PID制御の式とゲイン
- PID制御のプログラムを書き, 実システムに適用する方法
-
応用編
- 入力飽和に対するanti-windup
- 速度型PID制御
- 不完全微分を使ったPID制御
- 2自由度制御
- 目標値のフィルタ
- PID制御の応答をシミュレーションする方法
-
おまけ
- PI-D制御, I-PD制御
- カスケード制御
参考
- https://ja.wikipedia.org/wiki/PID制御
- https://controlabo.com/pid-control-introduction/
- https://controlabo.com/pid-gain/
- https://www.matsusada.co.jp/column/pid_control.html
- https://taketake2.com/K2.html
- https://github.com/teruyamato0731/Chassis/blob/main/src/Pid.h
- https://gist.github.com/teruyamato0731/176ab63cc9cf74cd70c55bff12316959
- https://github.com/teruyamato0731/pid-simulation
- https://hi-ctrl.hatenablog.com/entry/2018/02/25/020939
- https://www.maizuru-ct.ac.jp/control/kawata/study/book_lego/pdf_files/doc_003-1_PID.pdf
- https://qiita.com/getBack1969/items/520c68265a410ced630d
基礎編
はじめにPID制御について深く理解するため, フィードバック制御とPID制御の概要を述べる.
フィードバック制御の概要
制御とは「ある目的に適合するように、対象となっているものに所要の操作を加えること」である.
人による制御(手動制御)の代わりに, 制御システムによって行う制御を自動制御という.
PID制御は自動制御のうちのフィードバック制御に分類される.

制御手法の分類
制御手法には手動制御と自動制御の2種類が存在する.
人の手によって制御入力を調整する場合は手動制御, 制御システムによって制御入力を調整する場合は自動制御と呼ばれる.
自動制御は3つに分類できる. シーケンス制御, フィードフォワード制御(FF制御)とフィードバック制御(FB制御)である[1].
シーケンス制御はあらかじめ定められた順序に従って, 逐次制御を行う手法, フィードフォワード制御は目標値に基づいてフィードバックなしで制御を行う手法である. フィードバック制御については後に述べる.
更にフィードバック制御はレギュレータとサーボ系に大別できる.
レギュレータは状態を0に収束させるもの, サーボ系は変化する目標値に状態を追従させるものである.
PID制御はフィードバック制御の(積分型)サーボ系である.
フィードバック制御
フィードバック制御とは制御対象の状態をセンサ等で読み取り, それを制御システムに入力(フィードバック)することで制御入力を決定する制御方式である.
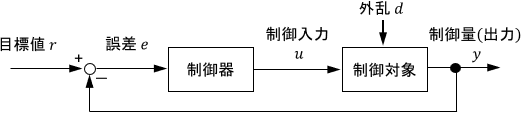
フィードバック制御のブロック線図[2]
一般的に目標値を
例えばモータの角速度を一定の目標値
以下にフィードバック制御の方式をいくつか解説する.
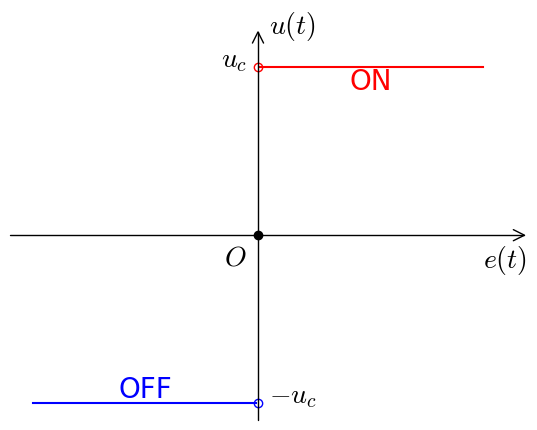
オンオフ制御
定数
偏差
オンオフ制御による応答のシミュレーションを以下に示す. オンオフ制御では目標値に収束できていないことがわかる.
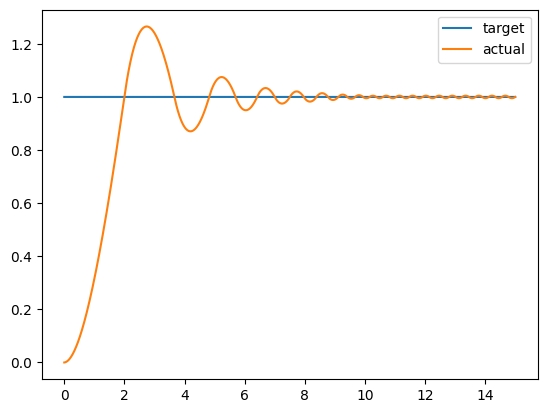
オンオフ制御による振動(ハンチング)
オンオフ制御には大きな問題点が2つある. 目標値付近で振動(ハンチング)が発生し目標値に収束しない(安定しない)点, 操作量がステップ状に大きく変動するため制御対象への負荷が大きい点である. その問題点を解決したのがP制御である.
P制御
比例定数を
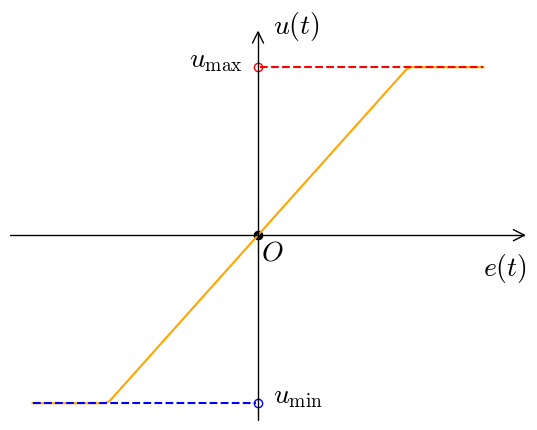
P制御に上限を加えたもの
P制御による応答のシミュレーションを以下に示す. 次第に収束に向かうが, 応答のはじめは目標値を大きく通り過ぎていることがわかる.
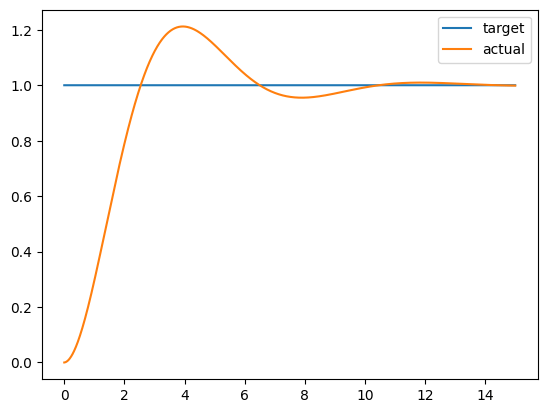
P制御によるオーバーシュート
P制御の問題点として目標値を大きく通り過ぎるオーバーシュートが挙げられる. その問題点を解決したのがPD制御である.
PD制御
P制御の問題点を解決するため, ブレーキの役割を果たすD項を追加する.
D項では
D動作では偏差の変化量(速度)が大きいほどブレーキを強くする.
これにより速度に応じて出力を減少させることで, 目標値付近で速度をゼロにする. (未来予測)
PD制御による応答のシミュレーションを以下に示す.
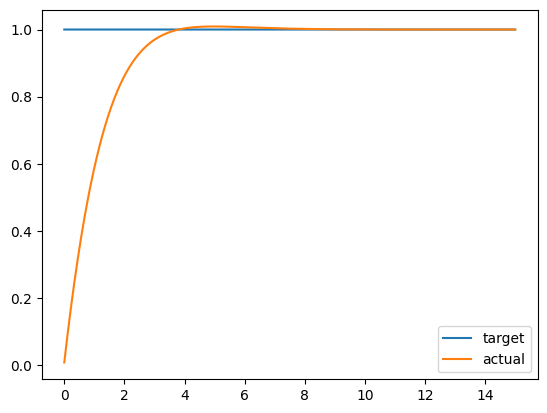
PD制御によってオーバーシュートを解決
P制御, PD制御の問題点として, いつまで経っても目標値に到達できず, 偏差が残り続けることがある. (これを定常偏差と呼ぶ. ) その問題点を解決するのがPID制御である.
PID制御
P制御, PD制御の問題点を解決するため, 定常偏差を打ち消すI項を追加する.
I項では
これにより, 偏差が残り続けた場合, I動作が大きくなることで定常偏差を打ち消す.
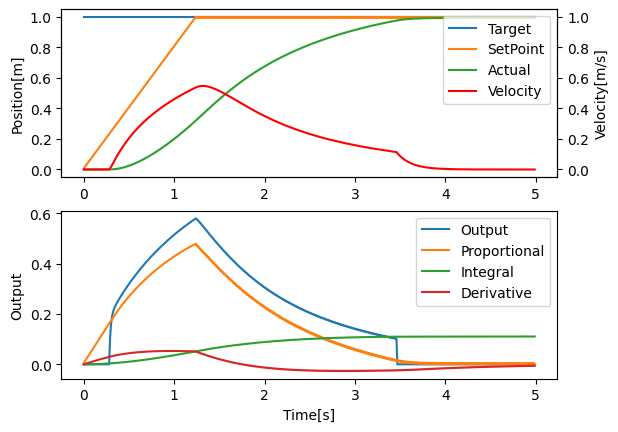
PD制御とPID制御による応答のシミュレーションを以下に示す. 下記シミュレーションでは外乱として一般的な重力を考慮し, 1方向に定常的な力を加えた.
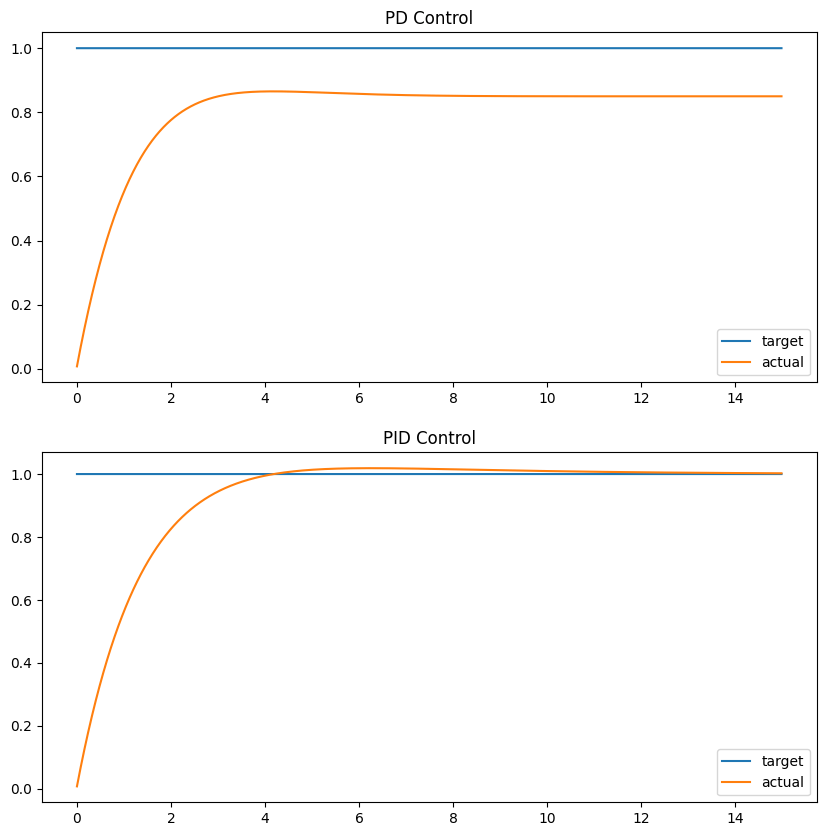
PID制御による定常偏差の打ち消し
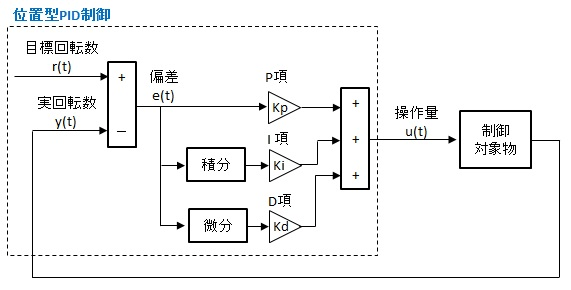
PID制御のブロック線図
PID制御のブロック線図は以下の通りとなる.

ブロック線図[1]
PID制御の式
あるシステムの状態を目標値
その他の表現
PID制御の式には複数の表現方法がある.
いくつかを以下に示しておく.
媒介変数
積分時間
誤差e(t)を展開したもの
ここで
P, I, Dそれぞれのゲインを変更した影響に関しては下記リンクの図がわかりやすい.
数式を離散化し, プログラムを書く
上で示した式は連続時間での数式である. 実制御においては離散時間で制御を行うので離散化する.
制御周期が
離散化
単位ステップ時間
プログラム用に変形
マイコン等では過去の情報をすべて記録することはできないので, 使用する情報はせいぜい2,3ステップ前までに制限する. また可読性を高めるため式は分割する.
プログラムを書く
この数式を下記表の通り変数で置き換えて擬似コード(Python)で示す.
| 意味 | 目標値 | 実際の値 | 偏差 | 前回の偏差 | 積分項 | 微分項 | 操作量 | ステップ時間 |
|---|---|---|---|---|---|---|---|---|
| 数式 | ||||||||
| 変数 | set_point | actual | error | pre_error | integral | deriv | output | dt |
error = set_point - actual
integral += error * dt
deriv = (error - pre_error) / dt
output = kp * error + ki * integral + kd * deriv
C/C++でのコード例
float kp = /* ここで値を設定 */;
float ki = /* ここで値を設定 */;
float kd = /* ここで値を設定 */;
float integral = 0.0;
float pre_error = 0.0;
while(1) {
float set_point = /* ここで値を更新 */;
float actual = /* ここで値を更新 */;
float error = set_point - actual;
integral += error * dt;
float deriv = (error - pre_error) / dt;
// この値↓を入力として使用する
float output = kp * error + ki * integral + kd * deriv;
pre_error = error;
}
補足
上式は数値積分を区分求積で近似しているが, 台形則で近似したほうが精度が高い. なお実用的な精度は区分求積で十分である.
数値積分の値を台形則で近似する場合
error = set_point - actual
integral += (error + pre_error) * dt / 2
deriv = (error - pre_error) / dt
output = kp * error + ki * integral + kd * deriv
pre_error = error
PIDの応答を簡単に数式でシミュレーションしたい場合
操作量
制御対象の時定数を
例えば,
疑似コード
actual = 15 / 16 * actual + 1 / 16 * output
C/C++によるPID制御とシミュレーション
float kp = /* ここで値を設定 */;
float ki = /* ここで値を設定 */;
float kd = /* ここで値を設定 */;
float integral = 0.0;
float pre_error = 0.0;
float actual = 0.0;
while(1) {
float set_point = 100.0;
float error = set_point - actual;
integral += error * dt;
float deriv = (error - pre_error) / dt;
float output = kp * error + ki * integral + kd * deriv;
pre_error = error;
// シミュレーション
actual = 15.0 / 16.0 * actual + 1.0 / 16.0 * output;
// 式を変形して以下の形でもよい
// actual += (output - actual) / 16.0;
}
補足:シミュレーションについて
シミュレーションには一次遅れのローパスフィルタを使用している。
応用編
PID制御にはいくつかの問題点がある. 主な2つは制御入力の飽和によるワインドアップと制御入力の急変(キック)である. 応用編ではその2つの問題点について解説した後, いくつかの解決策を示す.
制御入力の飽和
制御対象は一般に無限の制御入力を受け付けない. (例 : PWMのduty比は100%を超えることができない. モータに電流を流しすぎると発熱する. ) 過大な制御入力によって制御対象が破壊されるのを防ぐため, 上限と下限を設けるなどして操作量を制限する必要がある. 制御入力が上限もしくは下限に達した状態を, 制御入力の飽和という.
制御システムを設計する際は制御入力の飽和を考慮する必要がある.
ワインドアップとは
制御対象の特性によっては操作量の上限を迎えても目標値に到達できないことがある.
目標値に収束しないまま入力飽和が起こり続けると, 積分項が大きくなっていくワインドアップが発生する.

制御入力の制限を付けたPID制御器[1]
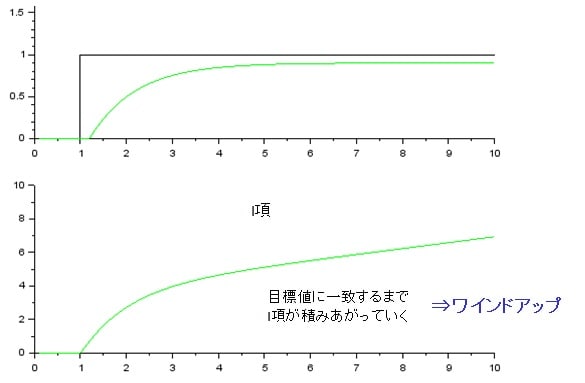
ワインドアップの発生[2]
ワインドアップが発生すると新しい目標値に対する応答遅れが発生する.[3]
ワインドアップ対策はいくつかあるが, 速度型PIDがおすすめ.
その他のワインドアップ対策
- 積分動作を停止する.
- I項に上限を設ける.
- 制御入力を超過している分だけI項から差し引く.
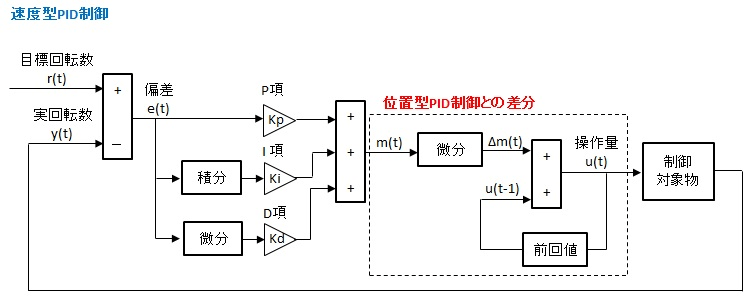
速度型PID
通常のPID制御(位置型PID制御)の代わりに速度型PIDを使用することでワインドアップ対策となる.
通常のPID制御(位置型PID制御)と比較して, 積分が移動している.
これによってI項の積分がなくなり, 制御入力の飽和が起こってもワインドアップが発生しない. [1]
通常のPID制御(位置型PID制御)のからの変形
2つ目の式の両辺を微分して
速度型PID制御の式(連続時間)
速度型PID制御の式(離散時間)
プログラム用に変形
疑似コード
| 数式 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 変数 | set_point | actual | error | pre_error | prop | pre_prop | deriv | du | output | dt |
error = set_point - actual
prop = error - pre_error
deriv = prop - pre_prop
du = kp * prop + ki * error * dt + kd * deriv
output += du
補足 : 通常のPID制御からの変形
以下の手順を踏むことで位置型PID制御から速度型PID制御への変形を確認できる.
位置型PID制御
位置型PID制御の出力を微分した後, 積分

速度型PID制御(微分の位置を左に移動)
不完全微分を使ったPID制御
D制御は微分を使用するため, 操作量の急変(キック)が発生しやすい.
これを抑えるために, D項にローパスフィルターを加えたものが不完全微分を使用したPID制御である.
不完全微分とは微分処理にローパスフィルター処理を加えた処理のことをいう. [1][2][3]
完全微分
不完全微分
離散時間
ローパスフィルタの時定数は
プログラム用に変形
擬似コード
| 数式 | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| 変数 | set_point | actual | error | pre_error | integral | deriv | low_pass_deriv | output | dt |
error = set_point - actual
integral += error * dt
deriv = (error - pre_error) / dt
low_pass_deriv += (deriv - low_pass_deriv) / 8
output = kp * error + ki * integral + kd * low_pass_deriv
組み合わせ
以上複数の対策を組み合わせた場合, 以下のようなコードとなる.
速度型PID制御 + 不完全微分
error = set_point - actual
prop = error - pre_error
deriv = prop - pre_prop
low_pass_deriv += (deriv - low_pass_deriv) / 8
du = kp * prop + ki * error * dt + kd * low_pass_deriv
output += du
速度型PID制御 + 不完全微分 + 制御入力の制限
error = set_point - actual
prop = error - pre_error
deriv = prop - pre_prop
low_pass_deriv += (deriv - low_pass_deriv) / 8
du = kp * prop + ki * error * dt + kd * low_pass_deriv
output = clamp(output + du, min, max)
2自由度制御
PID制御はフィードバックのみにより出力を決定する1自由度制御である. 制御対象の特性を理解し, フィードフォワード項(FF項)を追加することで2自由度制御になる. [1]
追加するFF項の例 : 重力補償, 目標値のローパスフィルタ, ゲインスケジューリング, etc...
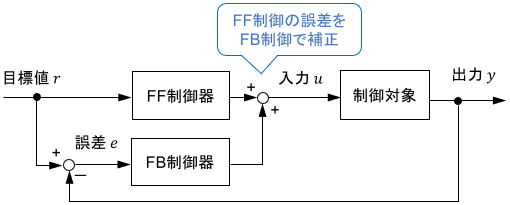
2自由度制御のブロック線図
重力補償
事前に重力の影響がわかっている場合, 重力の影響を打ち消すだけの制御出力を追加すると, 追従性や応答性の向上などが見込める.
例えば上下に移動する機構を制御するとき, 鉛直下向きに
output = pid() + anti_gravity
入力整形フィルタ
目標値をステップ状に大きく変化させると制御入力のキックが発生し, 制御対象に負荷がかかるなどして望ましくない. そもそも制御対象が応答できる速度には限りがあるため, 目標値の移動速度も制御対象の応答できる速度に制限すべきである. そこで目標値を直接入力するのでなく, 参照軌道をPID制御器に入力することで, 目標値の移動速度を制限し制御入力のキックを抑える.
例えばロボットの最大移動速度が
後述するP-PI制御よりも入力整形フィルタのほうがおすすめ. またLPFよりも速度制限のほうがおそらく良い.
制御入力のローパスフィルタ
上記のような様々な対策を施しても制御入力にキックが発生する場合, 制御入力にローパスフィルタを挟む.
PID制御のシミュレーション
初めに制御対象の物理モデルを同定する必要がある. その後Pythonでプロットする.
下記は魔改造PID制御のシミュレーションである. 制御対象の特性に応じてFF項を追加することも多い. (重力補償など)
モデルの仮定 (2次系)
制御入力
改良版PID制御 (目標値フィルタ + anti-windup + 不完全微分)
追従速度
上記の関数を定義して
PID制御のシミュレーション
おまけ
おまけとして実用上必須ではないが共有したいものを示す.
PI-D制御, I-PD制御
目標値が変化したとき, P項やD項による操作量の急変(キック)が発生することがある.
このキックを防ぐために目標値との偏差
キックを防ぐことはできるものの, 目標値の影響が小さくなるので, 応答性が悪くなるデメリットが存在する.
微分先行型PID制御(PI-D制御)
D項の入力に実値と目標値との偏差
error = set_point - actual
integral += error * dt
deriv = (actual - pre_actual) / dt
output = kp * error + ki * integral - kd * deriv
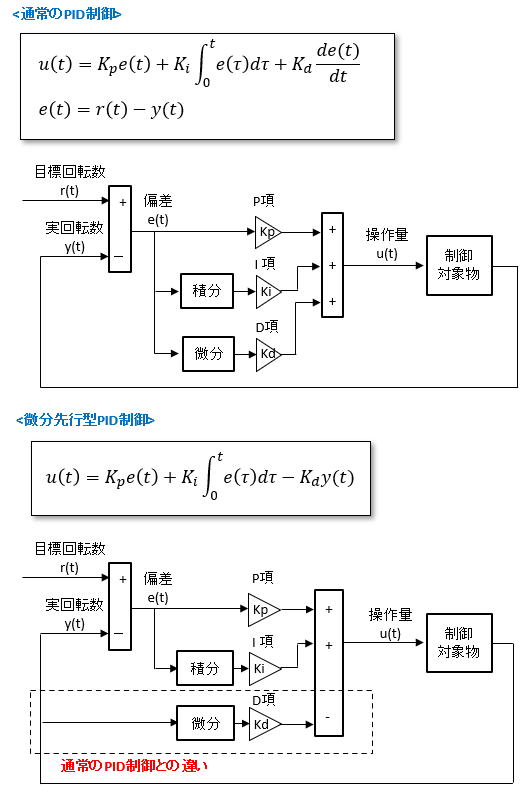
PI-D制御のブロック線図
比例微分先行型PID制御(I-PD制御)
P項, D項の両方の入力に偏差
error = set_point - actual
integral += error * dt
deriv = (actual - pre_actual) / dt
output = ki * integral - kp * actual - kd * deriv

I-PD制御のブロック線図
備考
私はキックを防ぎたい場合, 目標値の変化速度を制限したり(入力整形フィルタ), 制御入力をローパスしたりするのでPI-D制御・I-PD制御はあまり使用しない.
カスケード制御
カスケード制御はフィードバック制御の一種で, 二重のフィードバックループを作ることでより安定した制御を行う手法である.
例えばロボットの変位を制御したいとき, 外側のフィードバックループでロボットの目標速度を決定し, 内側のフィードバックループでモーターの角速度を制御する.
current_ref = pid(velocity_ref, velocity)
current_out = pid(current_ref, current)
C++で実装したテンプレートPID制御クラス
一般的なPID制御を行う.
T型同士とfloatとの演算が定義されていれば使用できる.
C++で実装した速度型PID制御クラス
D項に不完全微分を使用しており, ヘッダオンリーで使用可能.
使用例
Rustで実装したPID制御crate
PIDによる速度の制御
PID制御は位置の制御に用いることが多い.
PID制御で速度を制御する場合, いくつかの注意が必要となる.
速度が制御入力に一次遅れで応答する1次系の場合, Pゲインを大きくするとハンチングが発生する. I動作によって制御する意識が必要である.
P動作は偏差をゼロにする役割, I動作は外乱による定常偏差をゼロにする役割, D動作は速度をゼロにする役割を持つ.
またI動作は位相が90°遅れ, 逆にD動作は位相が90°進む.