[ロボット][STEM教育]オープンソースの犬型ロボット「Bittle X」を動かしてみた。1(組み立て編)

ロボット カコいい!
エンジニアなら "えっ。ロボットならサクっと作れますけど..." って言ってみたい。

英語でチンプンカンプン。35の動きができますよとかPython,C++で出来ますよ。とか言ってるっぽい
はじめに
ずっと気になってて欲しいなぁと思っとった先日、とうとう買ったった。5万円もすっから、清水の舞台から2回ぐらい飛び降りたよね。でもオープンソースだからソースコードが読めるし、極めたらロボットエンジニアにだってなれる。夢あるなぁって。
さっそく"頑張るばい"ってやる気満々で意気揚々と鼻息荒く、何なら鼻息で箱開けたんやけど、取説が全部英語(or中国語)...。で萎えた orz
という事で気を取り直して、動かすまでを気合と根性と日本語で残しておきます。役に立つかは知らんけど。
同梱内容

写真の通り。
自分で組み立てるタイプを選んだんだけど、足の部分やらボディやらはすでに組み立ててくれてんだね。
組み立て
組み立ての動画はこちら 英語なので何言っているかチンプンカンプン。7:57までは関係ない(組み立て済)なのですっとばし。
1. 上腕部/上脚部の組み立て
上の動画の7:57~。

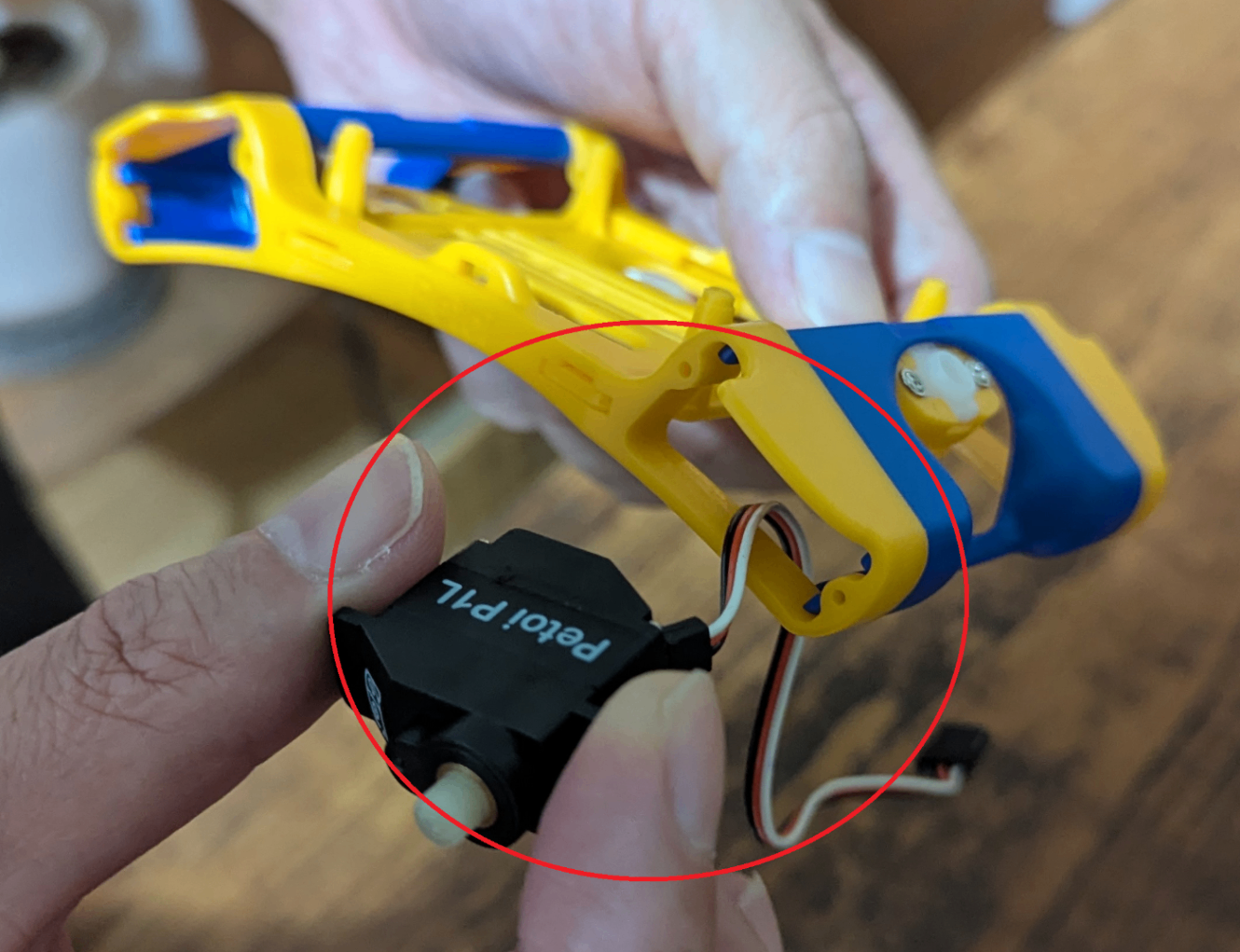
サーボモータはケーブルの長さが違う2タイプがある。上腕部/上脚部には長い方を選ぶ

↑使用するパーツ
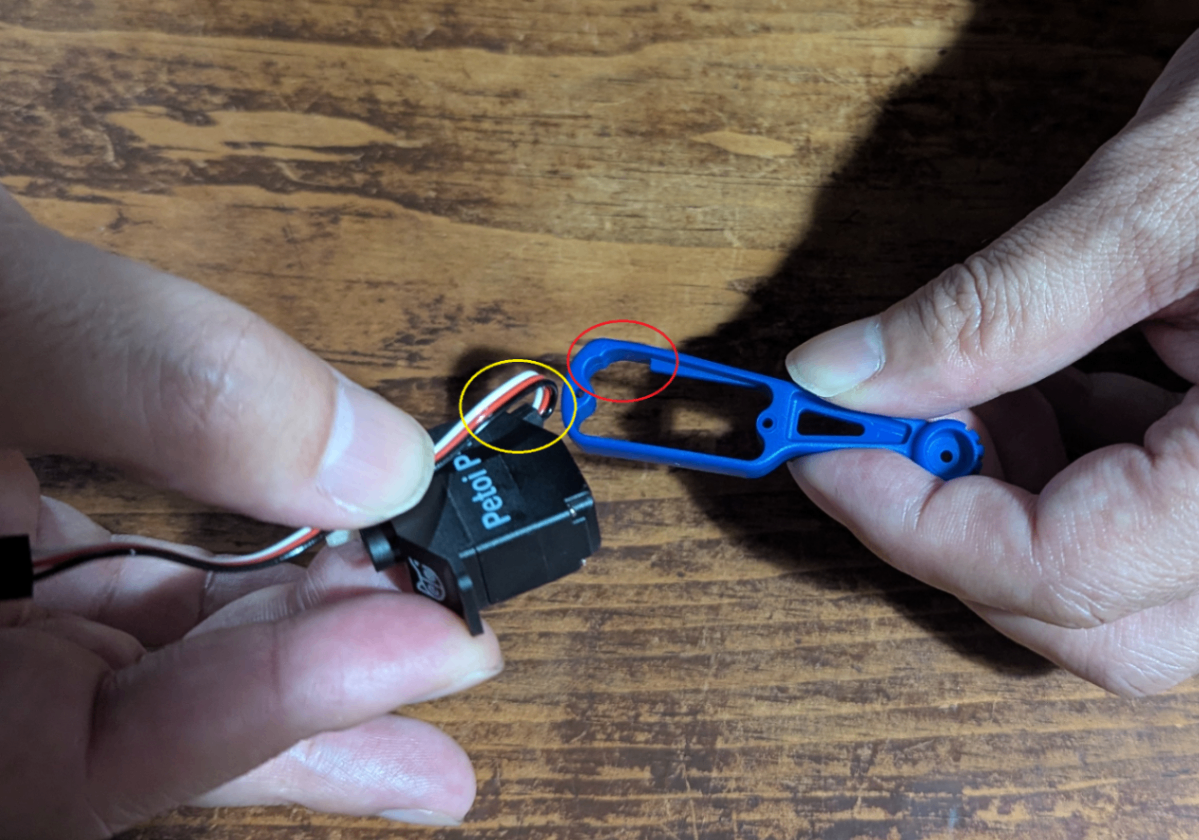
赤丸部分の膨らみにコードを通すのでこんな感じではめ込む
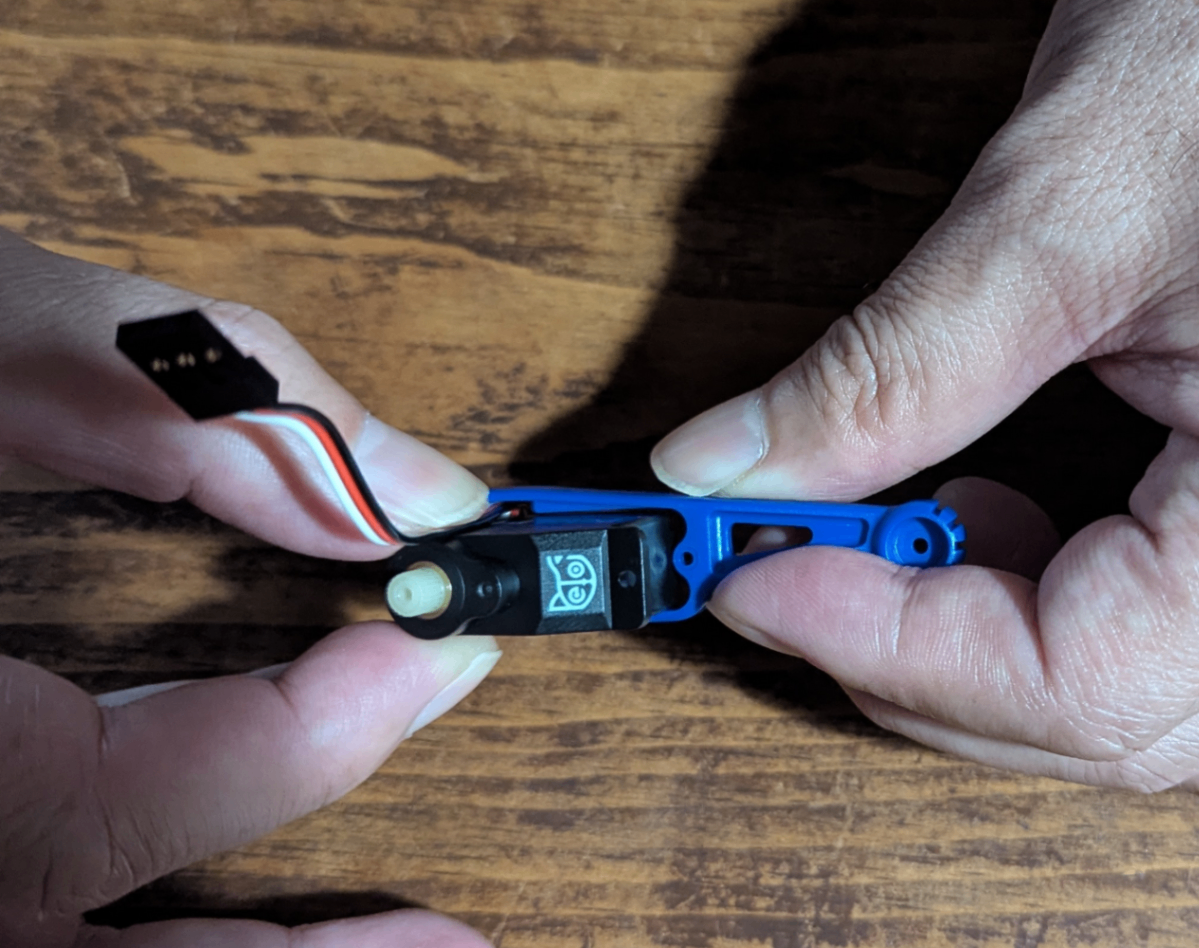
はめ込む中

はめ込む完了
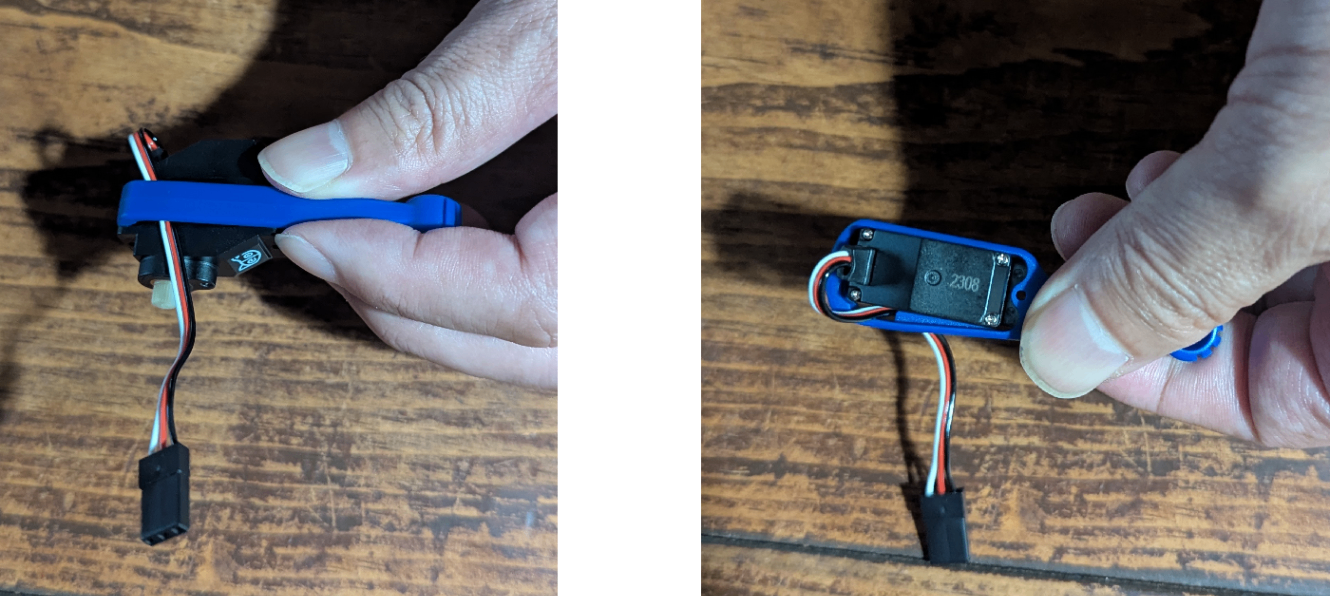
横から 後ろから
はめ込んだら付属のネジで止めていく。
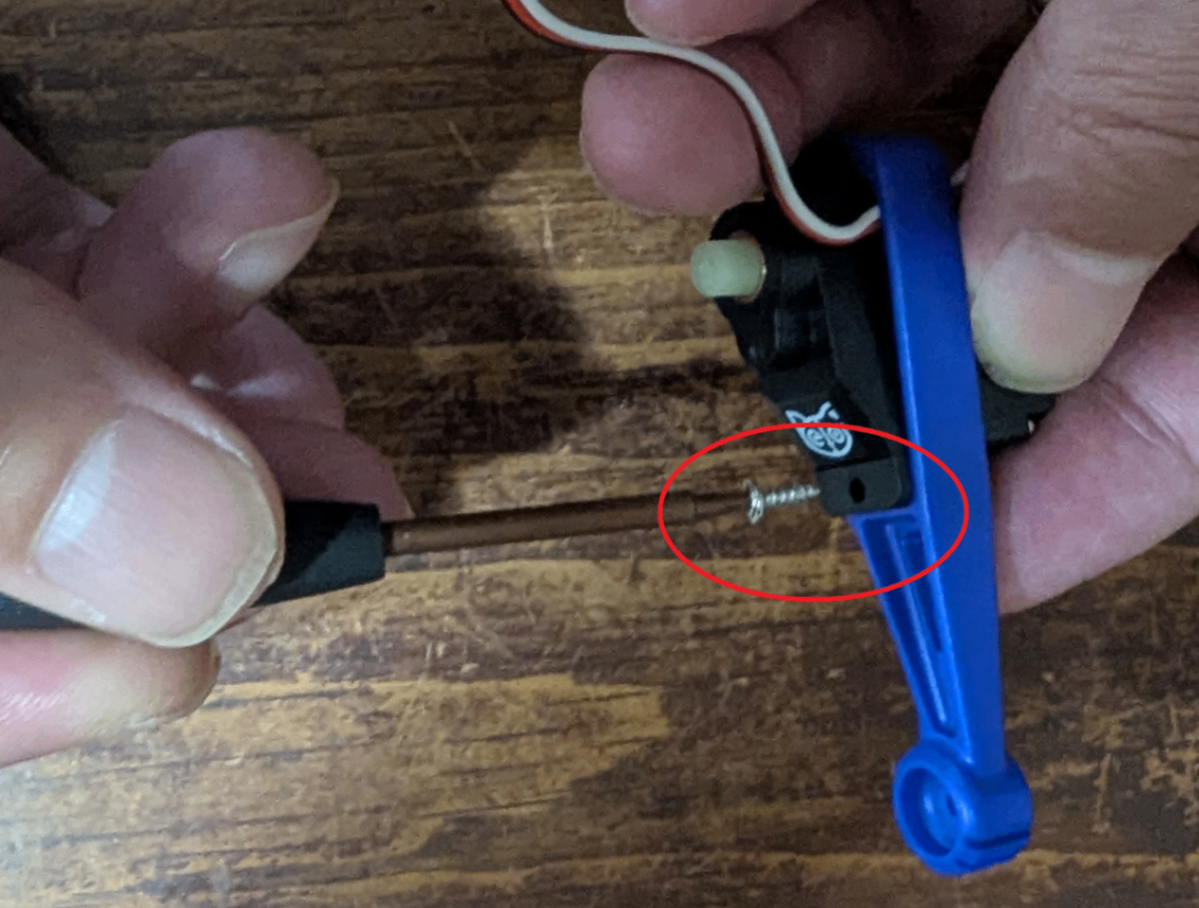
ネジ止め

ネジ止め完了
4つ分
2. 頭部分の組み立て
サーボモータ(ケーブル長い方ね)をはめ込むだけ。ケーブル出す方向は右だろうが左だろうがどっちでも、下にサーボモータの軸を持ってくること。

頭の組み立て完了。
眉毛みたいな線はただの汚れなので気にしない。届いた時からの汚れだけどまぁ問題ないし見た目の問題なだけやし。
3. 肩/腰部分の組み立て
-
3.1 まず背中の基盤を外す → その裏のバッテリーも外す。
届いた時は組み立てた状態なので、一旦外す必要がある。
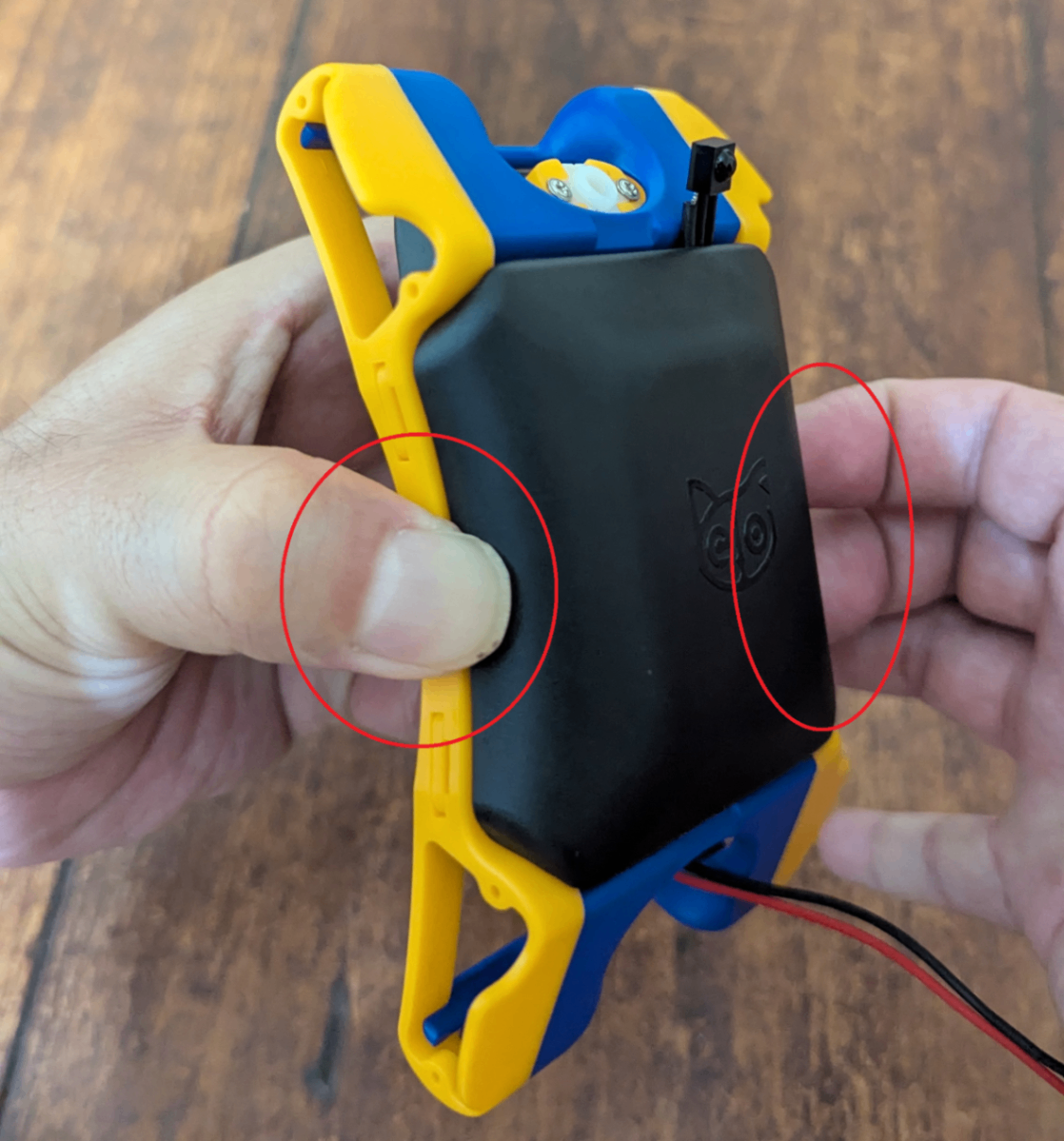
赤丸部分を押しながら、奥の赤楕円部分を引っかけてはがす様にすると外せる。
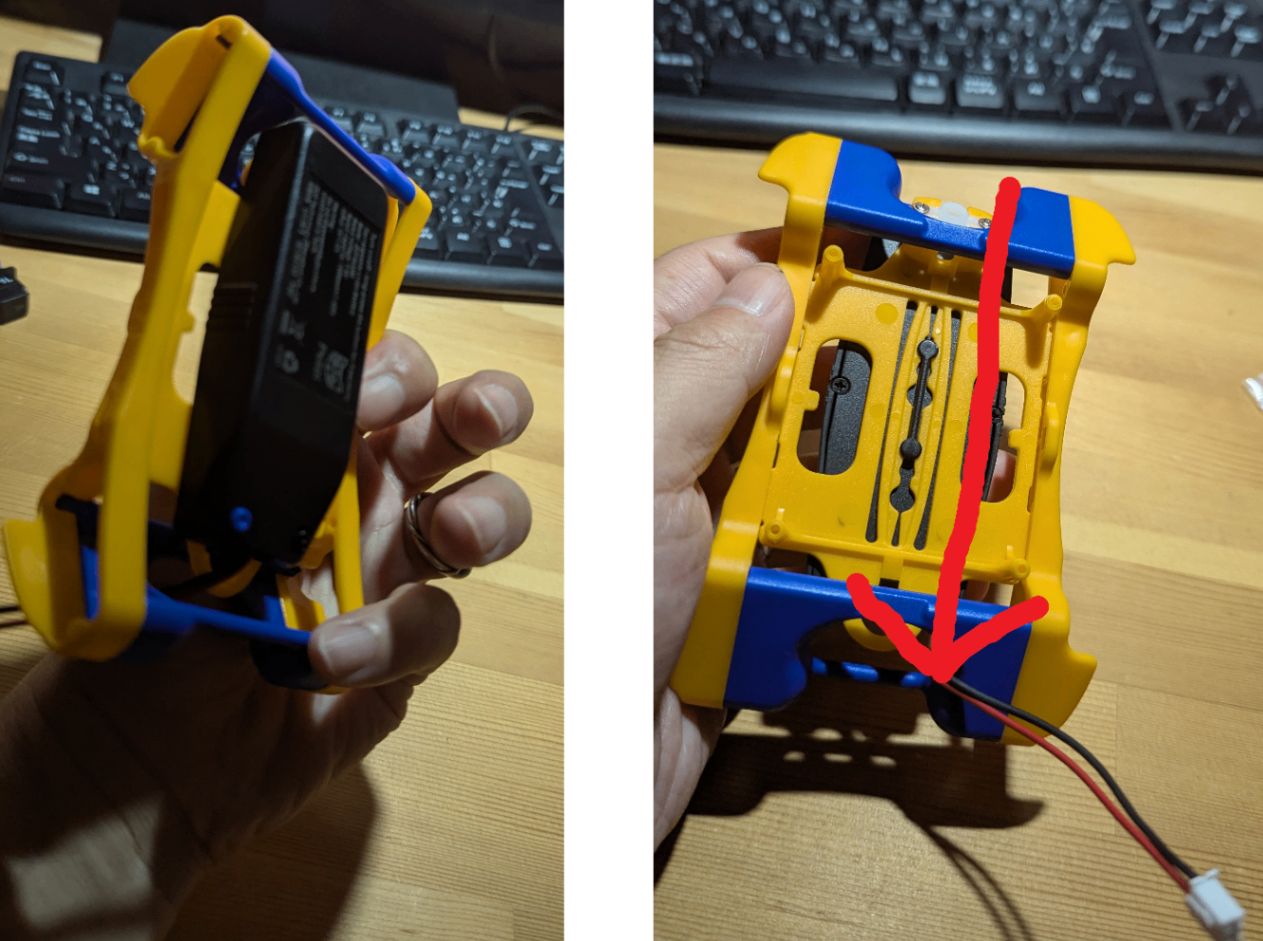
↑こっちが裏 ↑こっちが表
裏側のバッテリーを下方向にズラすと外せれる。
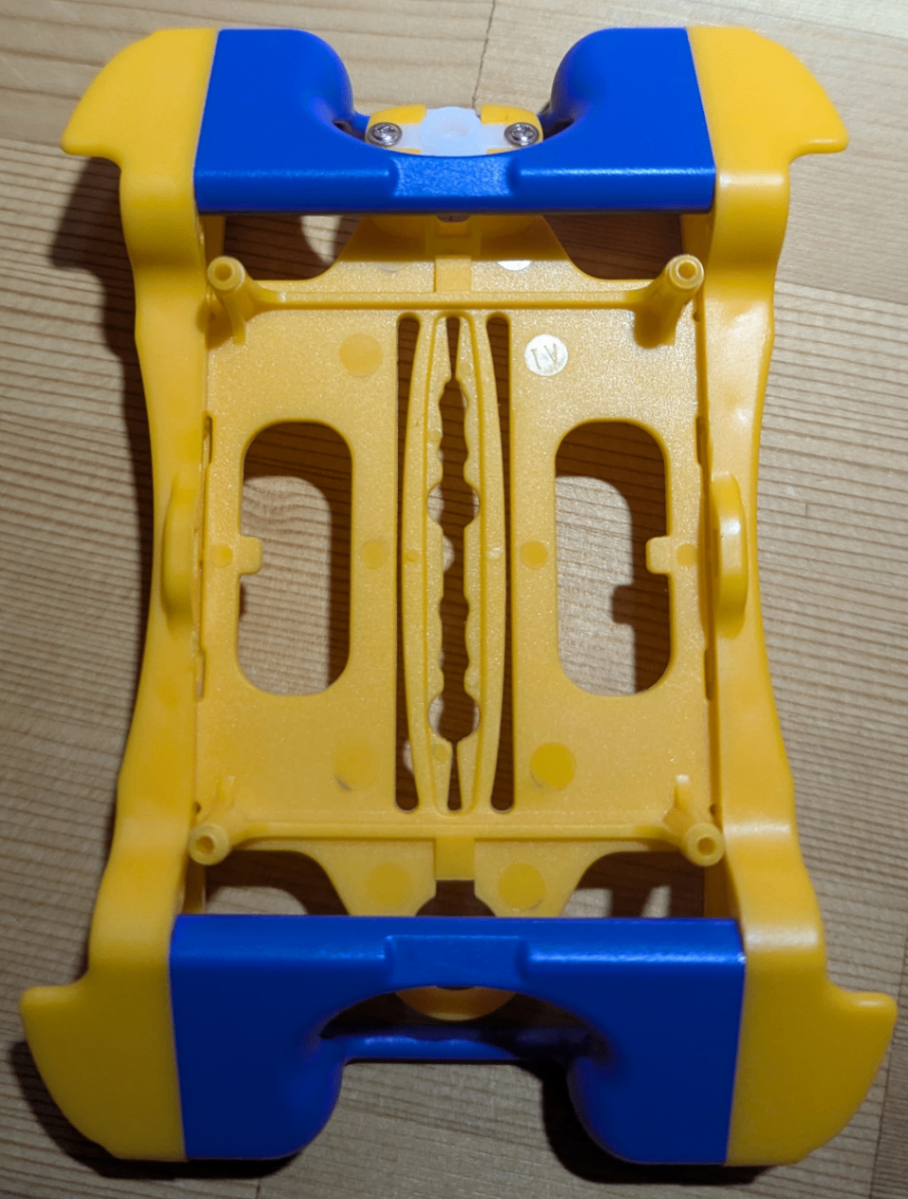
外したところ これの4隅にサーボモータを取り付けていく -
3.2 4隅にサーボモータを取りつける。
ここはサイズぴったりはまるようにできてる。すごいわー。
ポイントはサーボモータの軸を外寄りにはめること。

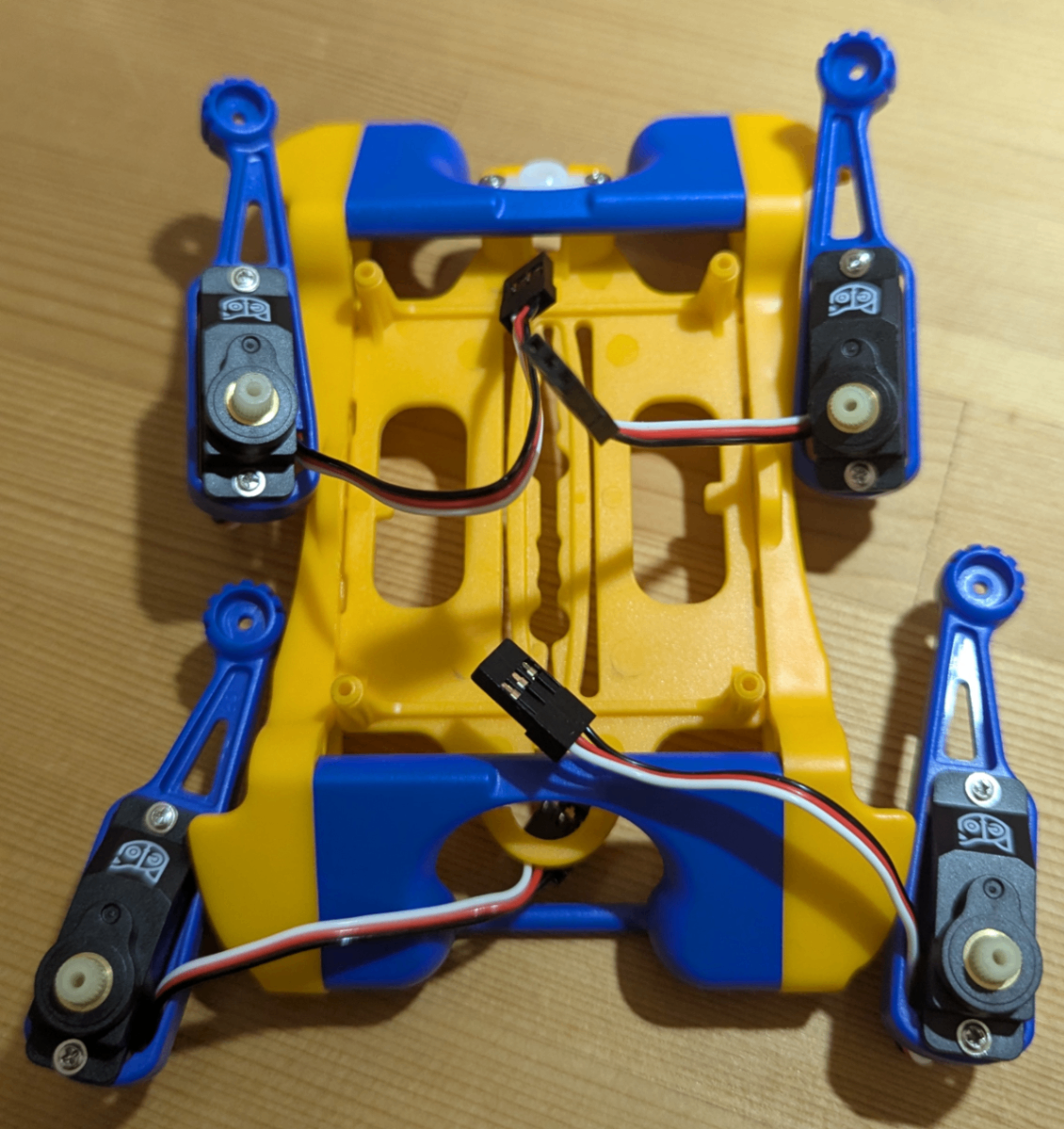
4隅にサーボをつけたところ ケーブルは穴から中央に出しておく -
3.3 上腕部/上脚部のケーブルも取り回しとく
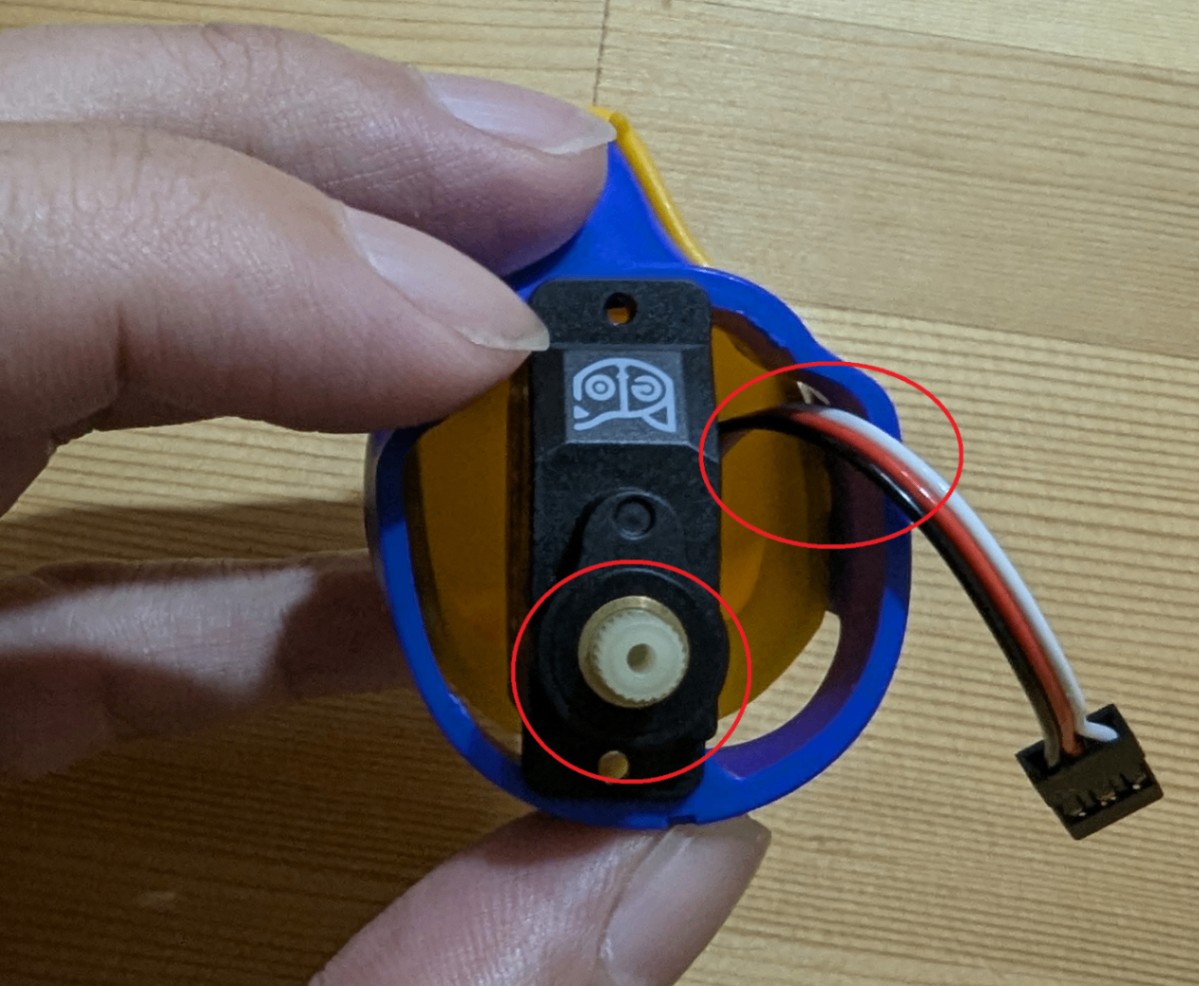
サーボモータには上下は違いないので気にする必要がないけど、左右は違いがあるので意識する。(間違ったところでほとんど気にならんとぐらいの違いだけど)
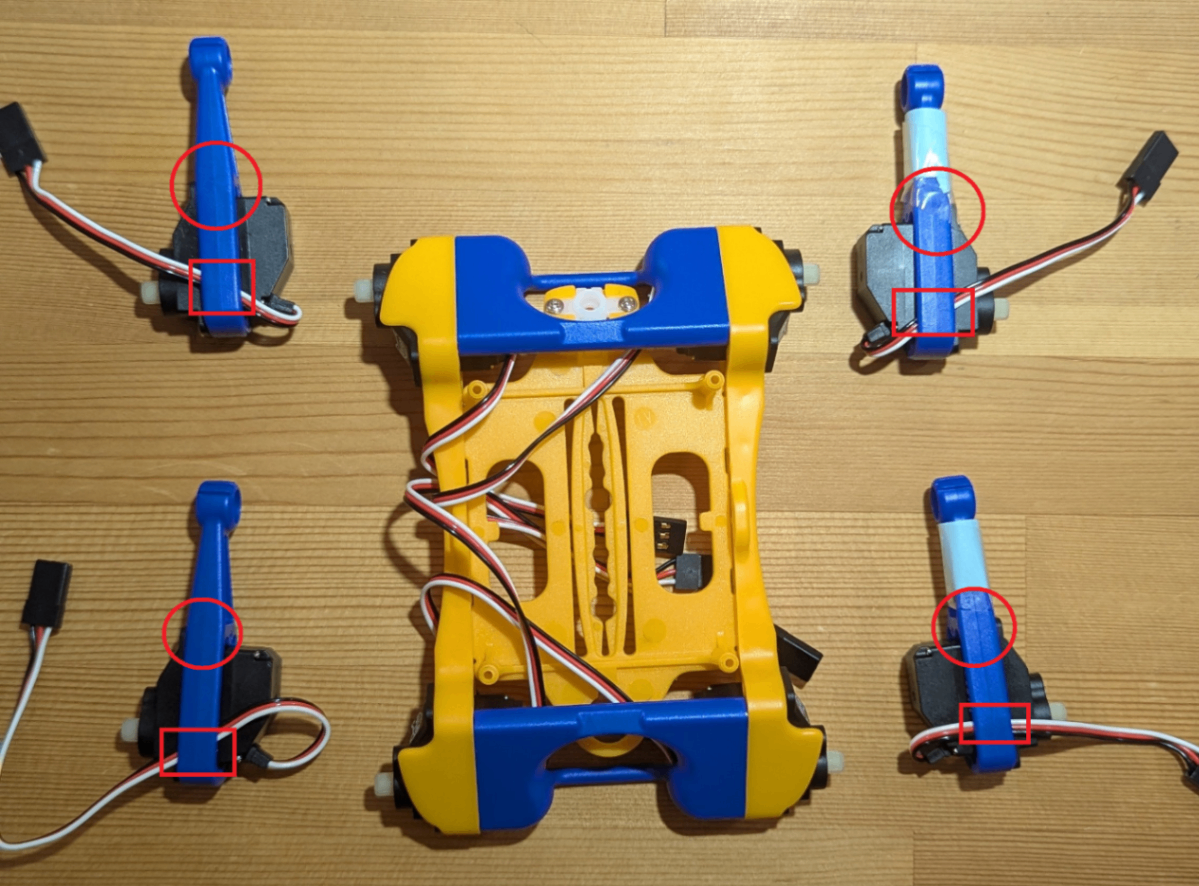
赤丸部分をみてでっぱりがない方を上に、ケーブル出した方を上に
ケーブルを赤三角部分から入れて、赤丸部分から出す。
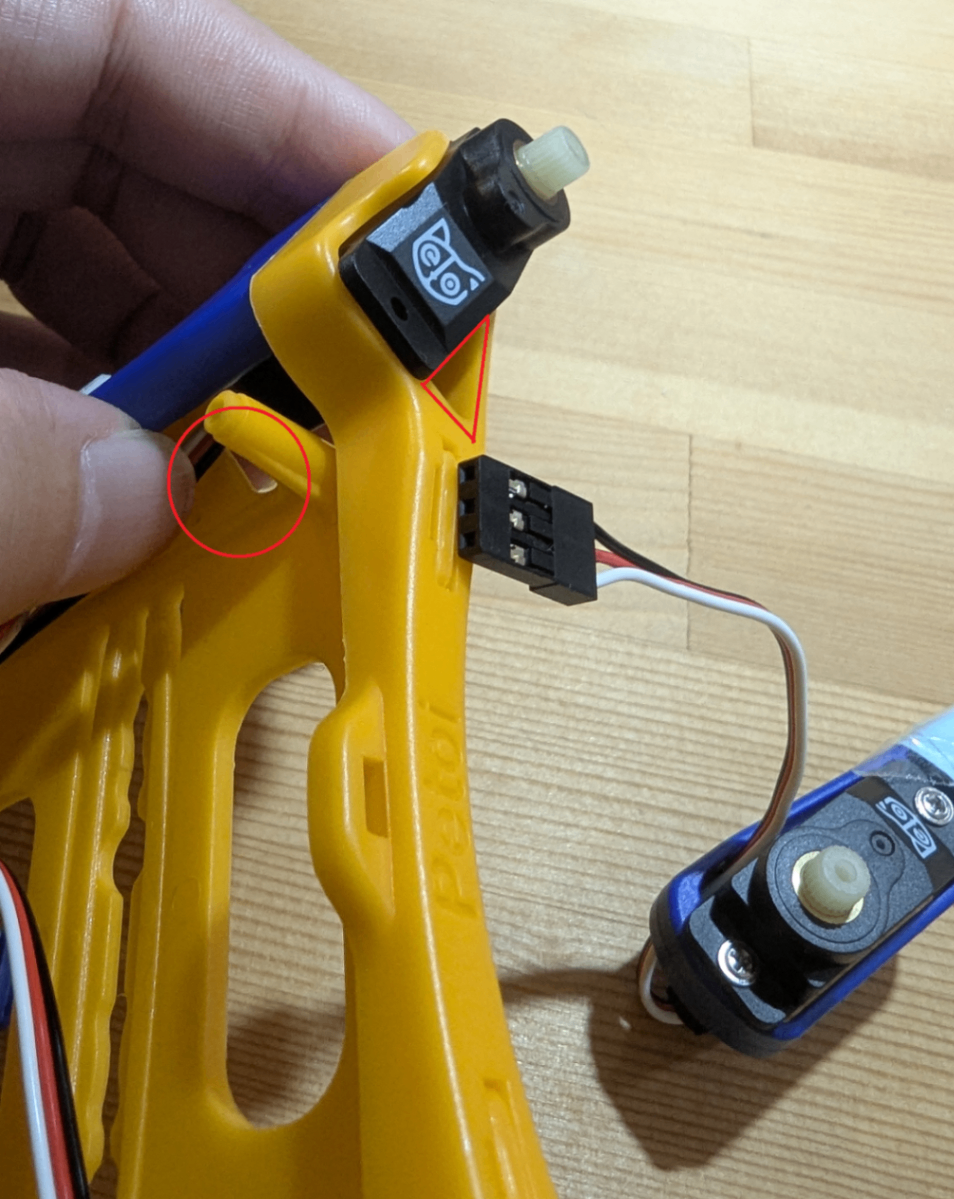

4本の上腕部/上脚部のケーブルの取り回しも完了したところ ケーブルは中央に出しておく
-
3.4 ケーブルを基盤につなぐ
繋ぎ先間違ったら大変。まともに歩行すらも出来なくなる。けどまぁその時は繋ぎ直せばいいだけなんだけど。
組み立ての動画だと16:40~の工程だけど、配線が全然違うのであてにならない。ここは動画無視。
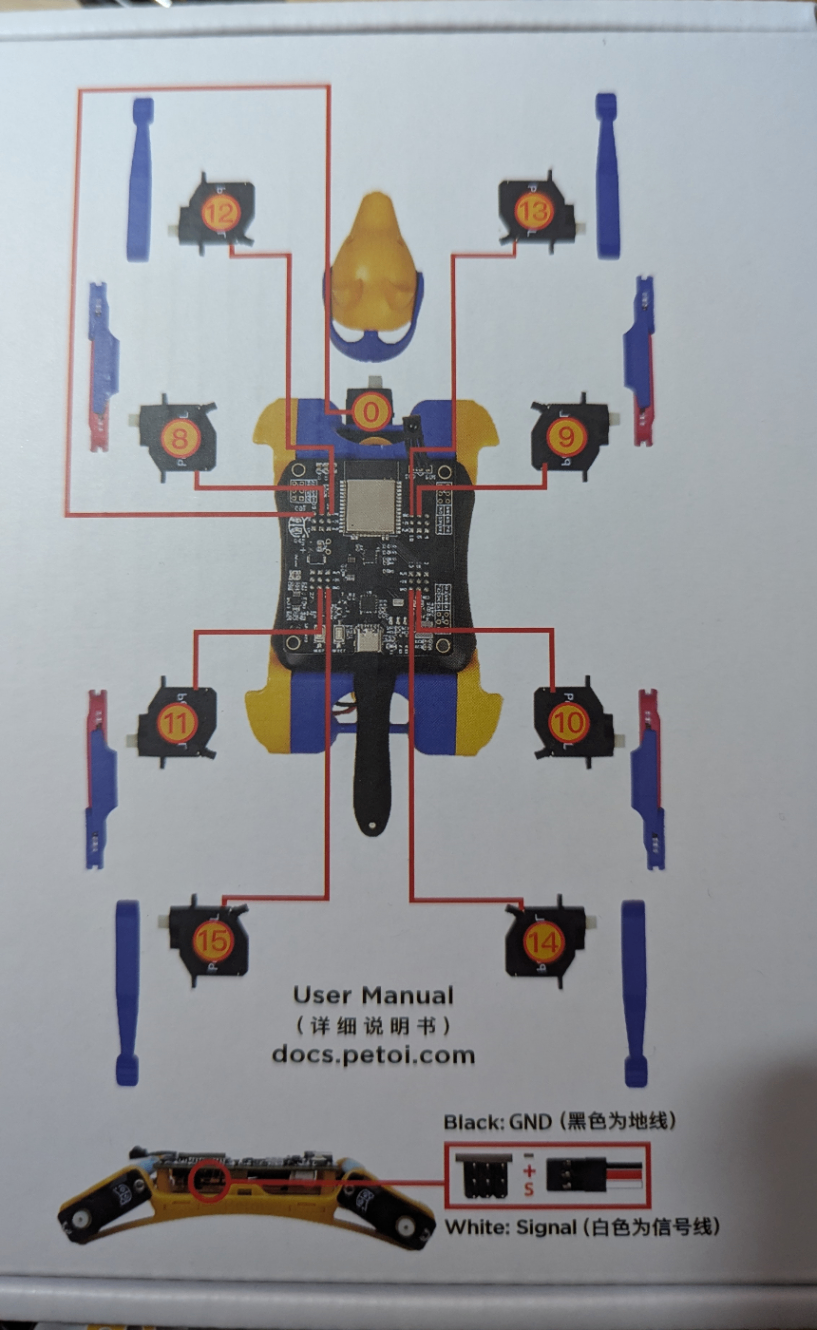
基盤への繋ぎ方の図(配線図) 届いた内箱の方に印刷されている

上記"配線図"に従って繋げていく 隠れてるけど奥の方が黒(GND)
実際にはめ込む時は表裏逆になってるので、それを意識して繋ぐ。
全部繋ぎ完了 ケーブルの長さからもう全開することができない
この工程で、頭も付けとく。
で、ネジ止め。

ネジ止めまで完了
4. 電池取り付けて、一旦起動
ここで起動する目的はサーボモータを零位置に移動させること。その後の"5. 足の組み立て"で、おおよその位置に組み立てできるようになる。
-
4.1 電池取り付け

電池のケーブルは赤丸部分に繋げる。

はめて上にズラせばいい感じに付けれる。
-
4.2 一旦起動

長押しして起動。起動音がけたたましい。 -
4.3 リモコンの赤丸を押下

サーボモータが動く。
5. 足の組み立て
組み立ての動画なら、26:23~27:39。途中、キャリブレーションとかやってるけど、後でやるから飛ばす。
で、足はもう組み立っているのでサーボモータをくっつける。これよく見ると上下対象デザインだから、間違ってもいいように出来てる。すごいなぁ

手で慎重に。

見た目通りにはめ込んでいく。
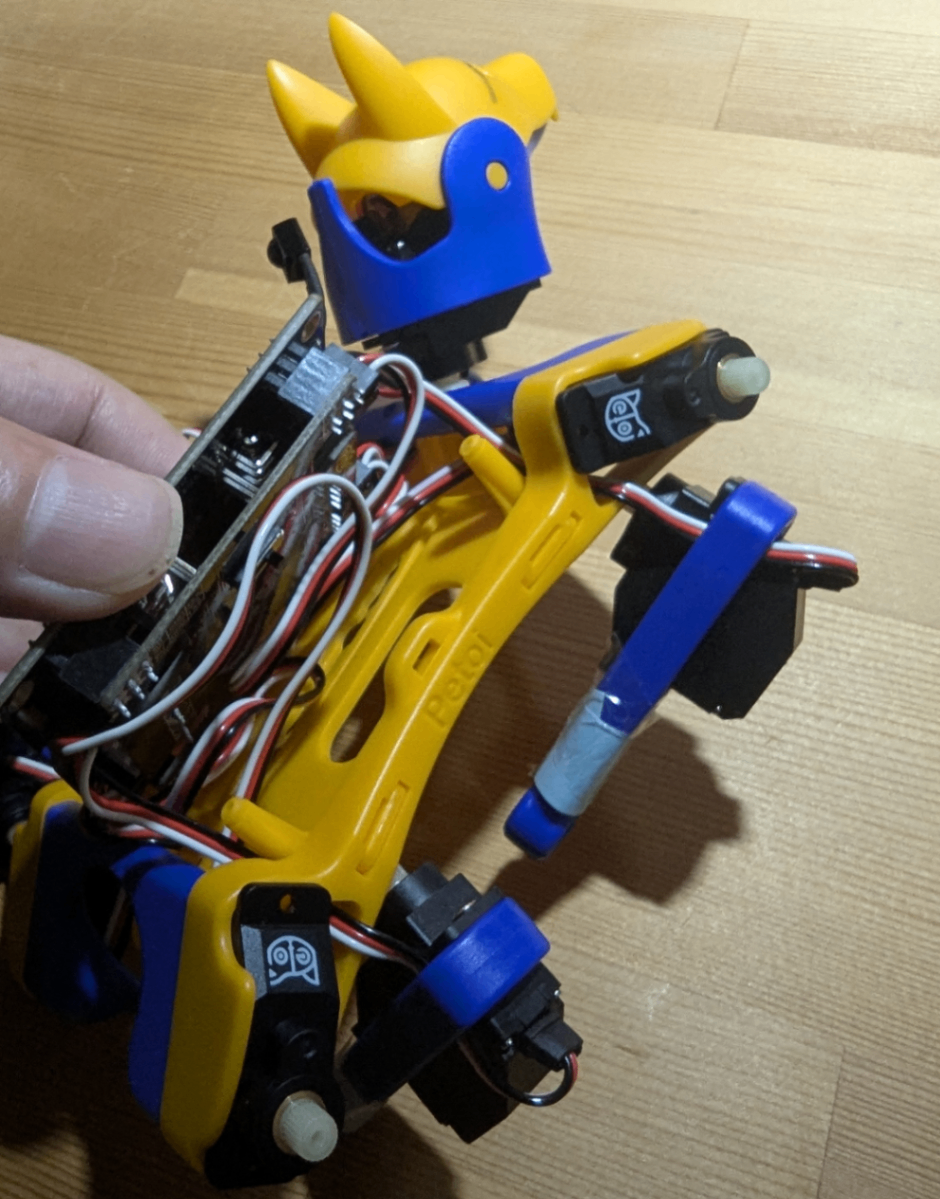
変な姿勢だけど、組み立て完了。

このポーズが初回起動のポーズらしい。
5. 本体カバーを取り付け

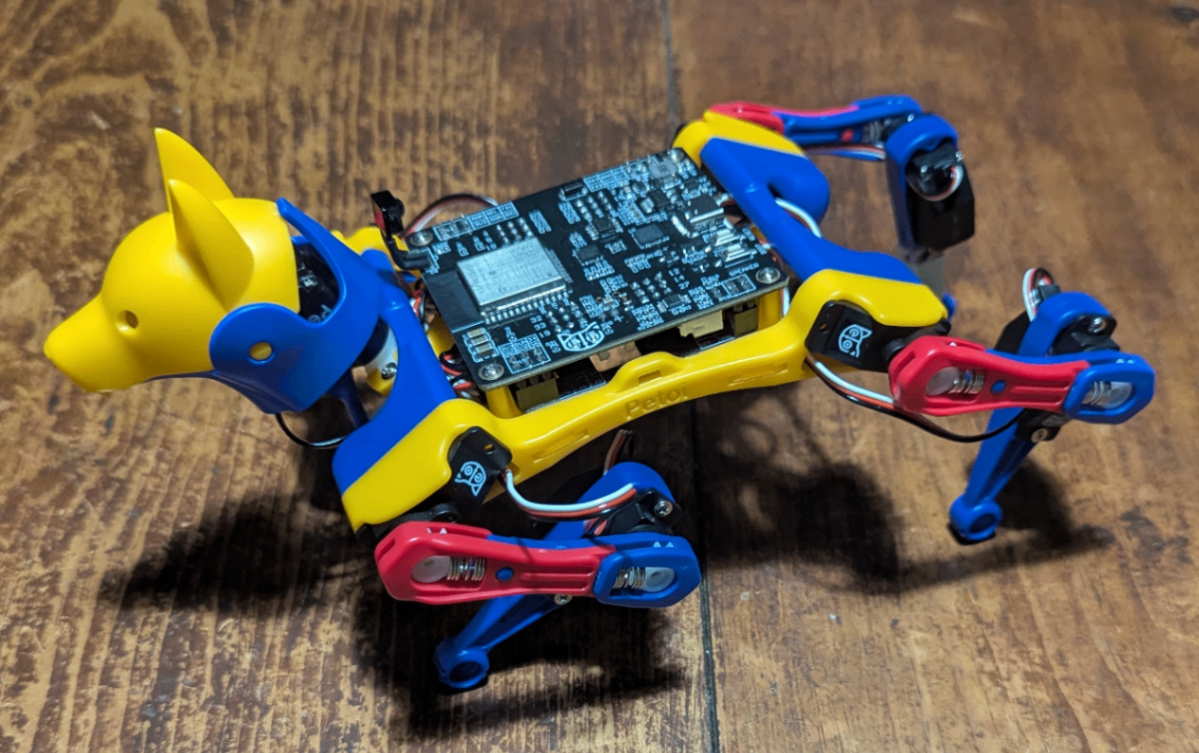
本体カバーも取り付け完了。
ひとまずこれで、組み立て完了!!
現時点では、リモコンの動きに動かないし、動きもいろいろ変だけど、次の工程でキャリブレーションするから、ひとまずOK。
次はキャリブレーション
https://zenn.dev/rg687076/articles/2d2dd9b3fcb3d0 >>
Discussion