[ロボット][STEM教育]オープンソースの犬型ロボット「Bittle X」を動かしてみた。2(キャリブレーション編)

<< https://zenn.dev/rg687076/articles/a4d52086255024
前ページの続き
組み立て終わったけど、実際に動かすと残念な動きをしていたのをキャリブレーション(校正)して正常動作するようにする。
このページを参考Introduction | Petoi Doc Centerに設定していくのだけど、また英語orz。
日本語で残します。役に立つか知らんけど。

1.準備
1.1.用意するもの
- Windows PCを準備しておく。Macとスマホでも出来るらしいけど、やり方不明。
- USB Driver ... 下記手順でダウンロードしておく

1.1.1 USB Driverインストール
-
下記赤線クリックしてUSB Driverダウンロード

-
CP210x_Universal_Windows_Driver.zipがダウンロードされる。→ 適当な場所で解凍
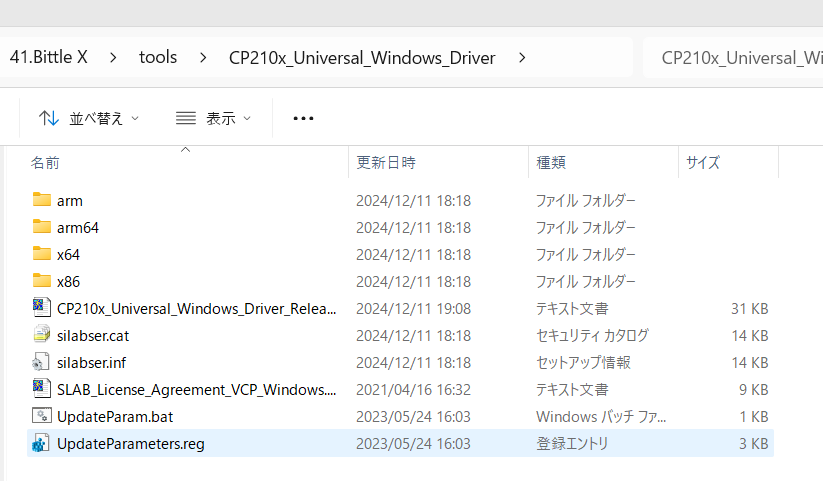
解凍したところ -
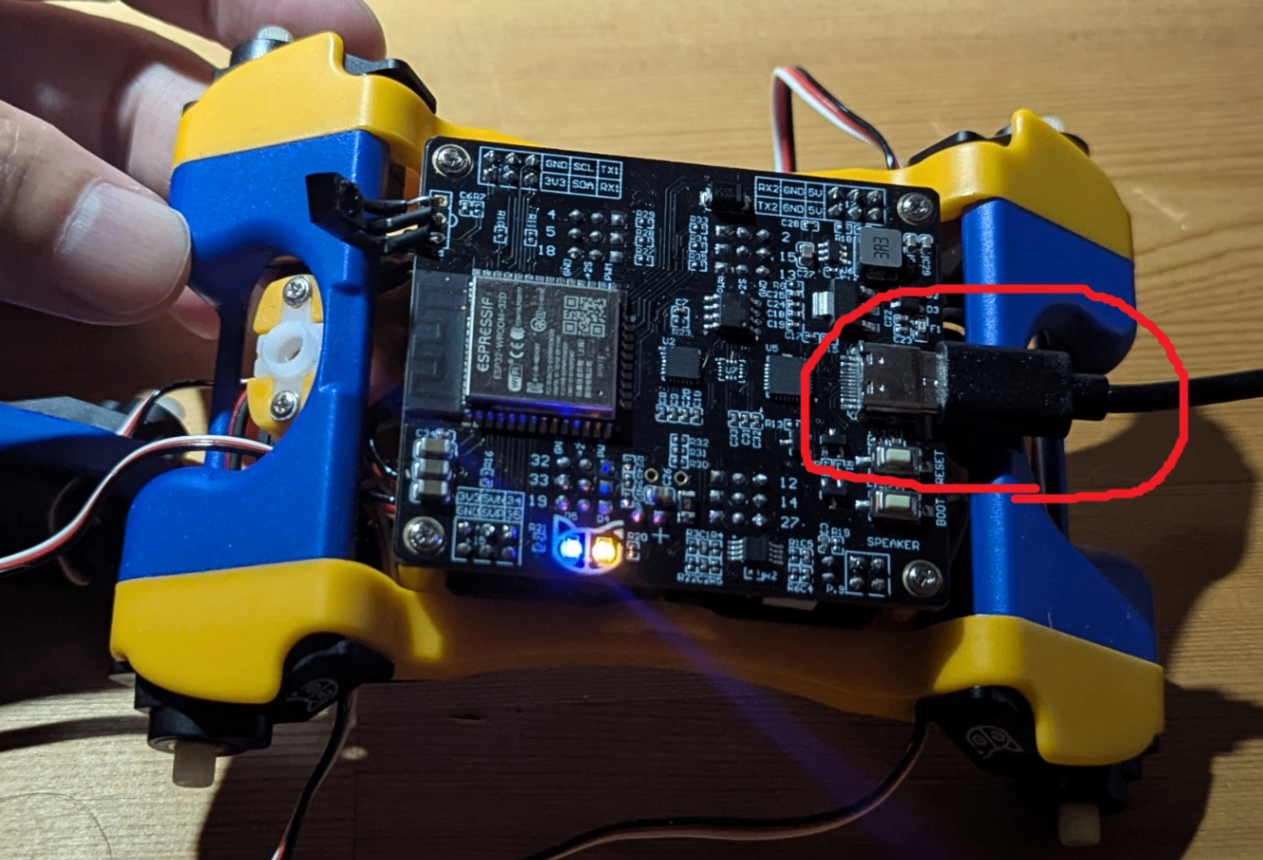
USBで接続する。
付属のUSBケーブルで「Bittle X」とPCとを繋ぐ。
-
デバイスマネージャ起動
認識に失敗した状態で繋がってる。

-
上記図の赤線のデバイスを選択 → 右クリック → ドライバーの更新

-
コンピューターを参照してドライバーを検索

-
3で解凍したフォルダを選択 → その下のサブフォルダーも検索するにチェック → 次へ

-
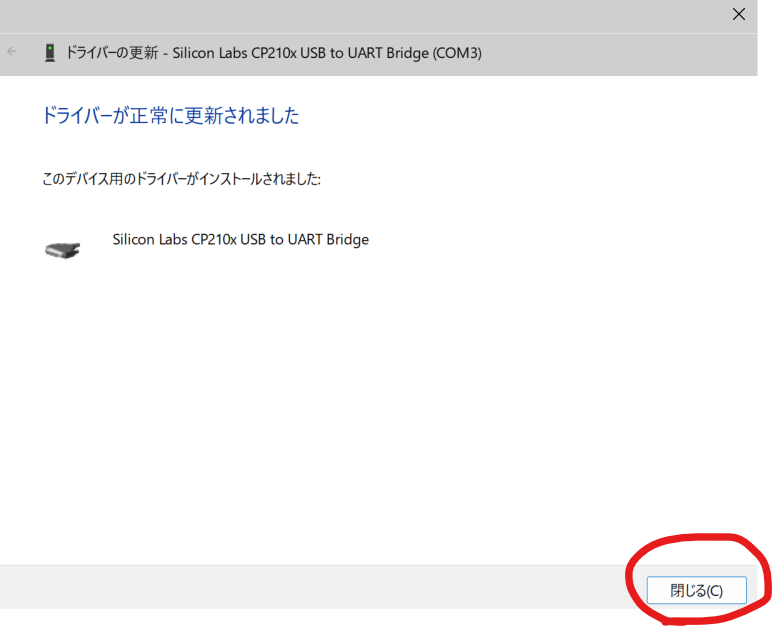
正常終了 → 閉じる
-
正常に認識するようになった。COM3で認識してる。

1.2.Petoi Desktop APPのインストール(解凍するだけインストール不要)
PetoiDesktopAppにアクセスしてPetoi.Desktop.App1.2.5_Win.zipをダウンロードして適当な場所で解凍(外国のソフトなのでパスに日本語は入れない方が無難)。

1.2.1. 解凍

パスには日本語文字を設定しない方がいいと思われ
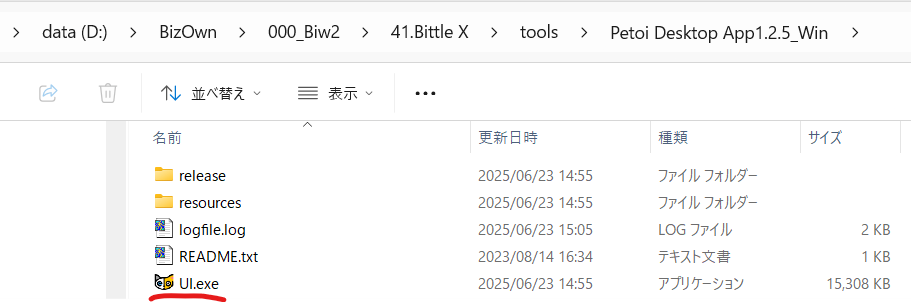
解凍したフォルダ配下にUI.exe がある。
2. キャリブレーション(校正)
校正: 計器類の狂い・精度を、標準器と比べて正すこと。
ま、ゼロ位置を調整すると思ってもらえれば。
公式(英語)のURL:
2.1. Bettle X本体側のバッテリの電源を入れる。

2.2. Bettle X本体側にUSBを挿す

2.3. PCにもUSBを挿す
とくにコメントなし
2.4. UI.exeを起動
解凍したフォルダ配下にUI.exe がある。
2.5. Bittle Xを選択

Model → Bittle Xを選択
2.6. Joint Calibratorを選択
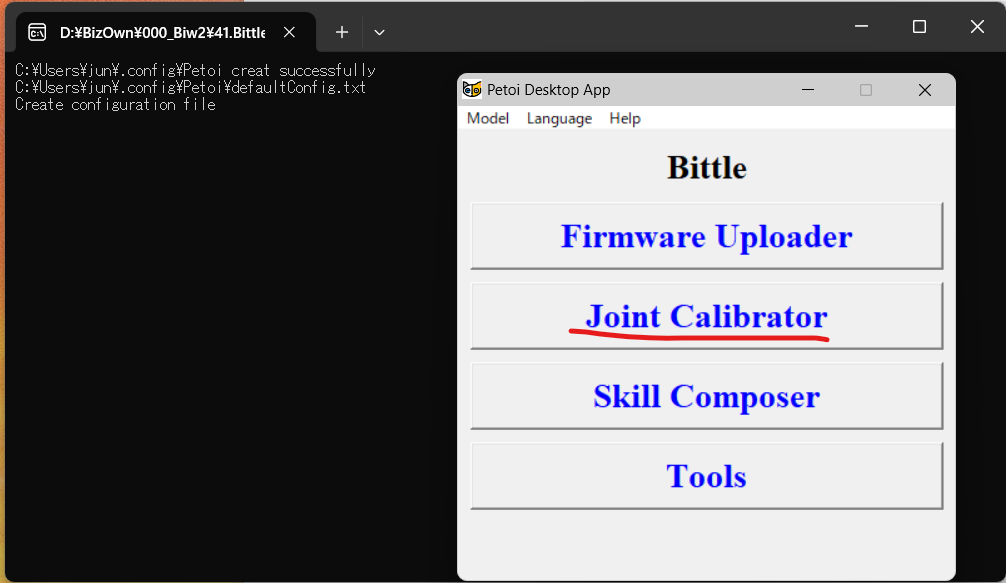
2.7. 警告画面が表示される。
Comfirt押下

※ちなみに本文の内容は、Copilotに聞いたら翻訳してくれた。
「このロボットは関節を回転させるためにバッテリーで電力を供給する必要があります。関節の動きを制御するために非常に重要です!
メインボードの黄色のLEDが点灯するはずです。そうでない場合は、バッテリーを接続し、ロボットの電源を入れるためにボタンを3秒間長押ししてください。」
2.8. しばらく待つ(10秒ぐらい)

無事起動した。
3.キャリブレーション状態に入る
Calibrateボタン押下

下記画像が期待の手脚の位置となる。

※大きく位置が異なる場合は、一旦外して付け直す。
あとは、スライドボタンを上下にズラして上記画像の体制に近づける。
(角度15°単位でしか変わらんらしいから、ぴったりにはできない)

4. Saveする。
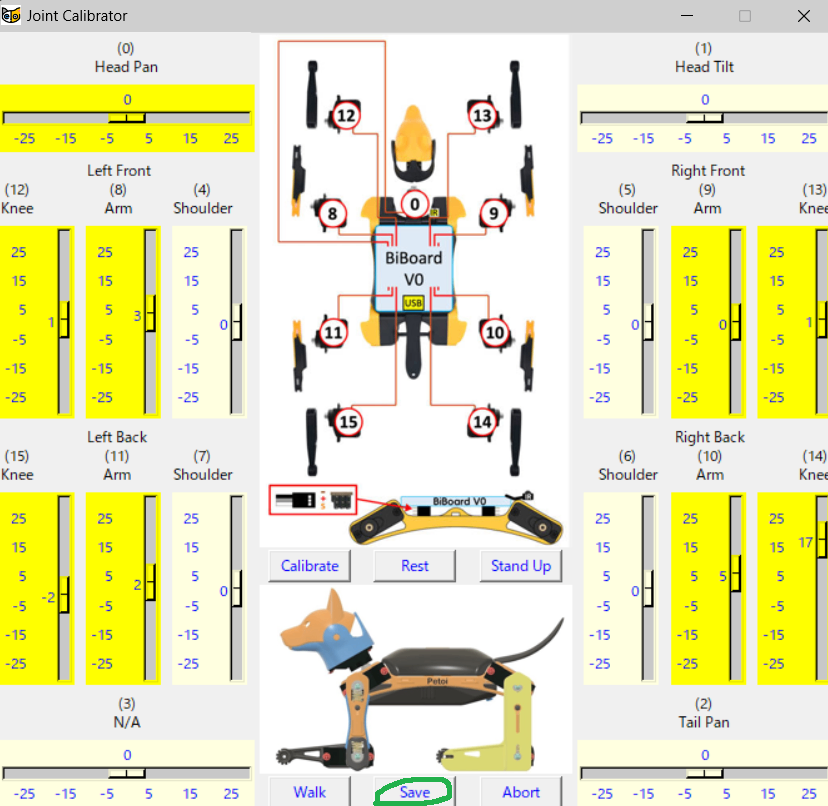
Saveボタン押下
5. exe終了。
繋いでたUSBもはずす。

6. キャリブレーション完了。
付属のリモコンを押すと動くはず。
Discussion