🚘
ラズパイ-ラジコン+αを自作する - その2(モータ制御)
🏁デモ

📚記事一覧
📍本記事の範囲
まずは、モータを制御し、移動できるようにします。
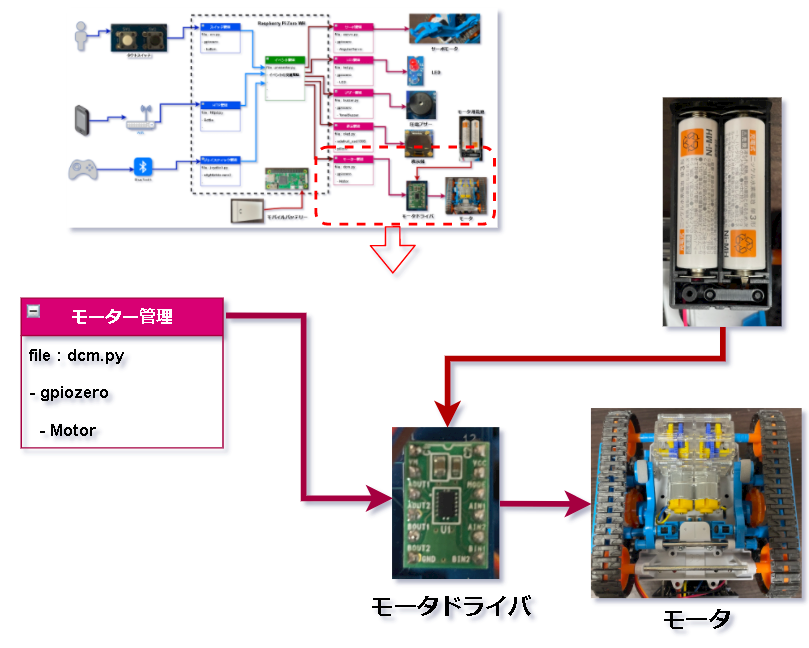
モーター管理について説明します。
🔧パーツ一覧
| 部品名 | 個数 | 内容 | 備考 |
|---|---|---|---|
| RaspberryPiZeroWH | 1 | ラズベリーパイゼロ本体 | 秋月電子 |
| カムロボット | 1 | カムロボット本体 | Amazon |
| モータドライバ(DRV8835使用) | 1 | モーラドライバ本体 | 秋月電子 |
| 電池ケース 単3×2本 | 1セット | DCモータ動作用 | 秋月 |
| 電池 単3 | 2 | DCモータ動作用 | - |
※全パーツは、その1-コンセプトを参照のこと
接続図
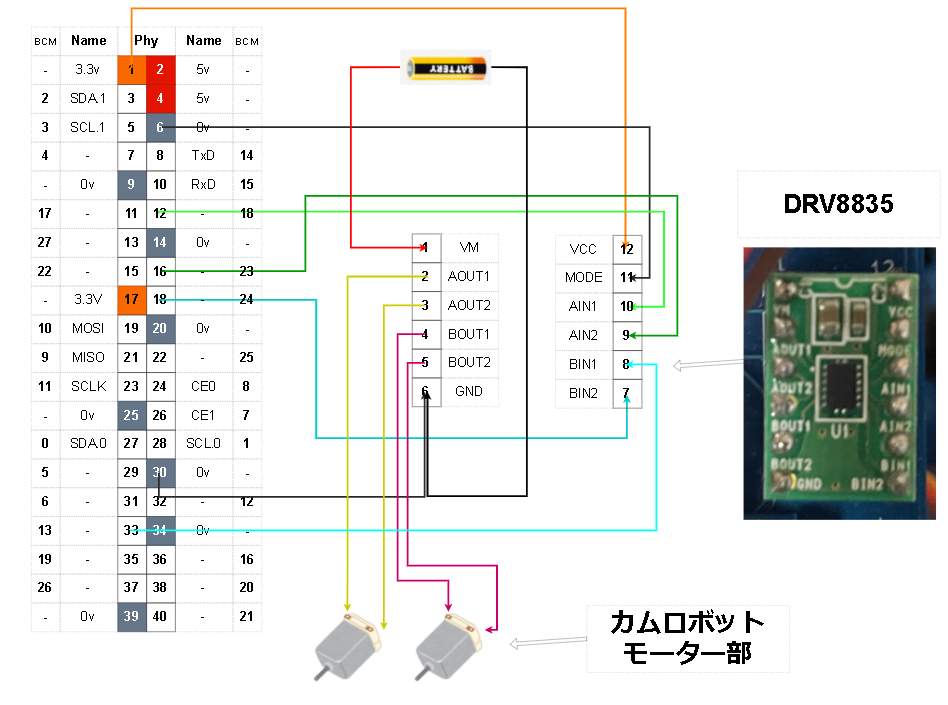
ピンの接続
ラズパイ側
| Pin | ドライブモジュール | 備考 |
|---|---|---|
| GND | [6]GND | - |
| BCM13 | [7]BIN2 | - |
| BCM24 | [8]BIN1 | - |
| BCM23 | [9]AIN2 | - |
| BCM18 | [10]AIN1 | - |
| GND | [11]MODE | DCモータモードのため、GND |
| 3.3V | [12]VCC | - |
ドライブモジュール側
| ドライブモジュール | 接続先 | 備考 |
|---|---|---|
| [1]VM | 電池+ | 電池のマイナスは、GNDに接続 |
| [2]AOUT1 | カムロボットモータへ | - |
| [3]AOUT2 | カムロボットモータへ | - |
| [4]BOUT1 | カムロボットモータへ | - |
| [5]BOUT2 | カムロボットモータへ | - |
| [6]GND | 電池- | - |
💻環境
開発環境
- ラズベリーパイ
- Linux rpi 5.10.17-v7l+ #1403 SMP Mon Feb 22 11:33:35 GMT 2021 armv7l GNU/Linux
- Python
- Python 3.7.3 (default, Jan 22 2021, 20:04:44)
ラズベリーパイの設定
特になし
モジュールのインストール
apt
pigpioライブラリは、Raspberry PiのGPIOを制御するためのライブラリです。
以下のコマンドは、はじめてインストールする場合のみ必要です。
$ sudo apt install pigpio
$ sudo service pigpiod start
$ sudo systemctl enable pigpiod.service
pip
Pythonに関するモジュールをインストールします。
$ python3 -m venv env
$ source env/bin/activate
(env) $ pip install pigpio
(env) $ pip install gpiozero
(env) $ pip install icecream
📝手順
最終的に、すべてのモジュールが連携するため、キューを使用しています。
コード
dcm.py
from queue import Queue
import threading
import time
from gpiozero import Motor
from time import sleep
from gpiozero.pins.pigpio import PiGPIOFactory
import sys
from icecream import ic
PIN_AIN1 = 18
PIN_AIN2 = 23
PIN_BIN1 = 24
PIN_BIN2 = 13
dcm_pins = {
"left_forward": PIN_AIN2,
"left_backward": PIN_AIN1,
"right_forward": PIN_BIN2,
"right_backward": PIN_BIN1,
}
MAG_TBL = {
"slow" : 0.5,
"mid" : 0.75,
"fast" : 1.0,
}
class DcmThread(threading.Thread):
"""
サーボ管理
例:
queue経由で、{'action': 'right', 'speed': 'fast', 'type': 'dcm'}
"""
def __init__(self):
threading.Thread.__init__(self)
self.stop_event = threading.Event()
self.setDaemon(True)
self._rcv_que = Queue()
factory = PiGPIOFactory()
self._motor_left = Motor( forward=dcm_pins["left_forward"],
backward=dcm_pins["left_backward"],
pin_factory=factory)
self._motor_right = Motor( forward=dcm_pins["right_forward"],
backward=dcm_pins["right_backward"],
pin_factory=factory)
return
def stop(self):
self.stop_event.set()
self._motor_left.value = 0.0
self._motor_right.value = 0.0
return
def run(self):
while True:
item = self.rcv_que.get()
ic(sys._getframe().f_code.co_filename, sys._getframe().f_code.co_name, item)
if "dcm" not in item["type"]:
ic(sys._getframe().f_code.co_filename, sys._getframe().f_code.co_name, "Error!!!")
continue
action = item["action"]
mag = MAG_TBL[item["speed"]]
if "forward" in action:
self._motor_left.value = 1.0 * mag
self._motor_right.value = 1.0 * mag
elif "back" in action:
self._motor_left.value = -1.0 * mag
self._motor_right.value = -1.0 * mag
elif "left" in action:
self._motor_left.value = -1.0 * mag
self._motor_right.value = 1.0 * mag
elif "right" in action:
self._motor_left.value = 1.0 * mag
self._motor_right.value = -1.0 * mag
else: #"stop"
self._motor_left.value = 0.0
self._motor_right.value = 0.0
return
@property
def rcv_que(self):
return self._rcv_que
def main():
import time
dcm_th = DcmThread()
dcm_th.start()
q = dcm_th.rcv_que
q.put({"type": "dcm", "action": "forward", "speed": "fast"})
time.sleep(1)
q.put({"type": "dcm", "action": "back", "speed": "fast"})
time.sleep(1)
q.put({"type": "dcm", "action": "left", "speed": "fast"})
time.sleep(1)
q.put({"type": "dcm", "action": "right", "speed": "fast"})
time.sleep(1)
q.put({"type": "dcm", "action": "stop", "speed": "fast"})
time.sleep(1)
dcm_th.stop()
return
if __name__ == "__main__":
main()
実行手順
(env) $ python dcm.py
以下の順番でカムロボットが動作します。
- 1秒 - 直進
- 1秒 - バック
- 1秒 - 左に転回
- 1秒 - 右に転回
- 停止
デモの結果になります。
🔎ポイント
モータドライバ(DRV8835使用)
モータドライバ(DRV8835)にてのモータを制御します。
本製品は、DCモータまたはステッピングモータ用のドライバとして使用できます。
カムロボットに搭載されているモータは、DCモータのため、[11]MODEピンをLOW(GND接続)にする必要があります。
IN1/2に対する正転/逆転/ブレーキの関係は以下となります。
| xIN1 | xIN2 | xOUT1 | xOUT2 | 動作 | コード上の紐づけ |
|---|---|---|---|---|---|
| 0 | 0 | HiZ | HiZ | 空転 | stop |
| 0 | 1 | L | H | 逆転 | back |
| 1 | 0 | H | L | 正転 | forward |
| 1 | 1 | L | L | ブレーキ | brake |
2回路分のDCモータの制御ができます。
今回、使用するモータは、1.5~3.0Vで駆動するモータを使用しています。。
本ドライバは、モータ電源は2V~11Vでの動作となります。
電源が大きいモータを動かす場合は、使用できないので注意してください。
以下が、電源に関する情報です。
| 電源使用 | 動作範囲 | 該当ピン |
|---|---|---|
| モータ電源 | 2-11V | AOUT,BOUTが該当 |
| ロジック電源 | 2-7V | AIN,BINが該当 |
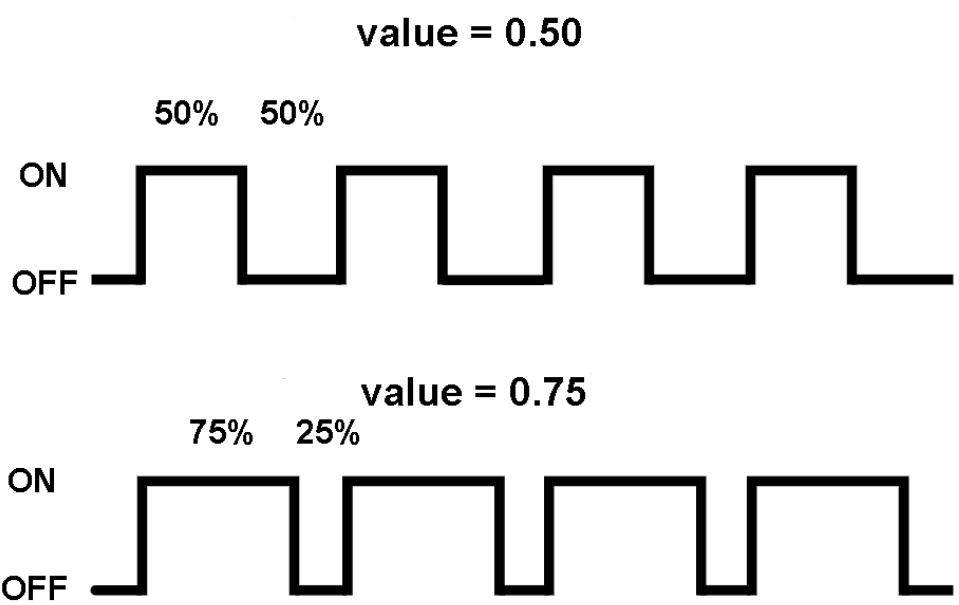
速度制御(PWM制御)
速度を調整するのに、パルス幅変調(PWM:Pulse Width Modulation)調光方式を使用しています。
ONしている時間が長ければ速く(/短ければ遅く)移動します。
コードの対応は以下となります。
self._motor_left.value = 1.0 * mag
self._motor_right.value = 1.0 * mag
さいごに
次は、腕の動作について記載したいと思います。
あと、それ以外のラズパイの活用方法を
としてまとめ中です。
Discussion