🦊
遠隔操縦の探検車 ANEx2(ANa Explorer2)の開発① フロントページ
フロントページ
遠隔操作のロボットカーANEx2(ANa Explorer)について書いてゆきます。内容が膨大なので各章ごとにページを分けて、徐々に書いてゆきます。まあ、気が向いたら。
 |
ANEx = ANa Explorer 防空壕(穴)を探検するためのロボットカー |
|---|
目次
- フロントページ(このページ)
- 使った部品について
- 制御系全体の概要
- 車体
- 動力系(モーター、サーボ)
- センサー
- カメラ
- PCとの通信
- 制御プログラム
- フィールドテスト
記載されてる技術
- 遠隔操作のロボットカー(モーター、サーボ、ラジコン用タイヤ+ホームセンター素材)
- ESP32でのモーター制御、センサー制御
- ESP32とPCの通信(PC側はPython)
- PCからリモートカメラをコントロール(Agent DVR)
- AmazonやAliExpressで購入した怪しい部品の使いこなし
初めに
諸事情で人間が入るのが「ちょっとな~」というところってありますよね。例えば防空壕とか地下指令室とか地下魚雷調整所とか。諸事情ってのはもちろん崩落などで危険な場合もありますが、穴の中に潜むコウモリ氏やゲジゲジ様、イノシシ殿などと戦うのに人間はあまりに無力です。そこで、人間の代わりに穴に入って探検してくれる探検車、その名も、
「ANEx = ANa Explorer」
を作りました。今回のは実は二代目なのでANEx2です。1代目は子供用の乗用ラジコンを改造して作ったんですが、意外と大きい&重い&小回りが利かなくて実用性なしでした・・・。なので、ANEx2は仕様として、
目標仕様
- 有線制御
曲がりくねった穴の中なので、携帯やWiFiの電波は届きません
搭載カメラでリアルタイム画像が見たいのでそこそこの通信速度が必要
穴の中で万が一トラブった場合は、最悪、線を引っ張って回収
→ というわけで、有線LANで制御します - そうすると必然的に、
長いLANケーブル(100mぐらい)を引きずることになります
→ そのためある程度の重量とそれを動かすパワーが必要 - 防空壕などの人工の穴を想定しているので地面は比較的フラットだが、凸凹、溝、水たまりはある。
→ 地面から車体底面まではある程度の高さが必要
タイヤもある程度の凸凹を超えられる大きさが必要
もちろん四駆だ! - と言っても足場が悪いところで運用する必要があるので一人で持ち運び可能なサイズ
- 狭い穴の中でも機敏に動けるように回転半径は小さく
→ 信地転回ぐらいはできるように - 各種センサー装備
環境測定センサー:温度、湿度
計測用センサー:赤外線距離(上部、左、右)、LIDAR(180°スキャン)
位置センサー:コンパス、車輪回転(走行距離)、 3軸加速度(車体姿勢)、GPS
と盛りだくさんの仕様になってます。まあ、穴の中でGPSは効かないんですけどね・・・
完成形
↓んで、これが完成版
防空壕探検に向かう雄姿(これはWiFi制御中なんでケーブル無し)

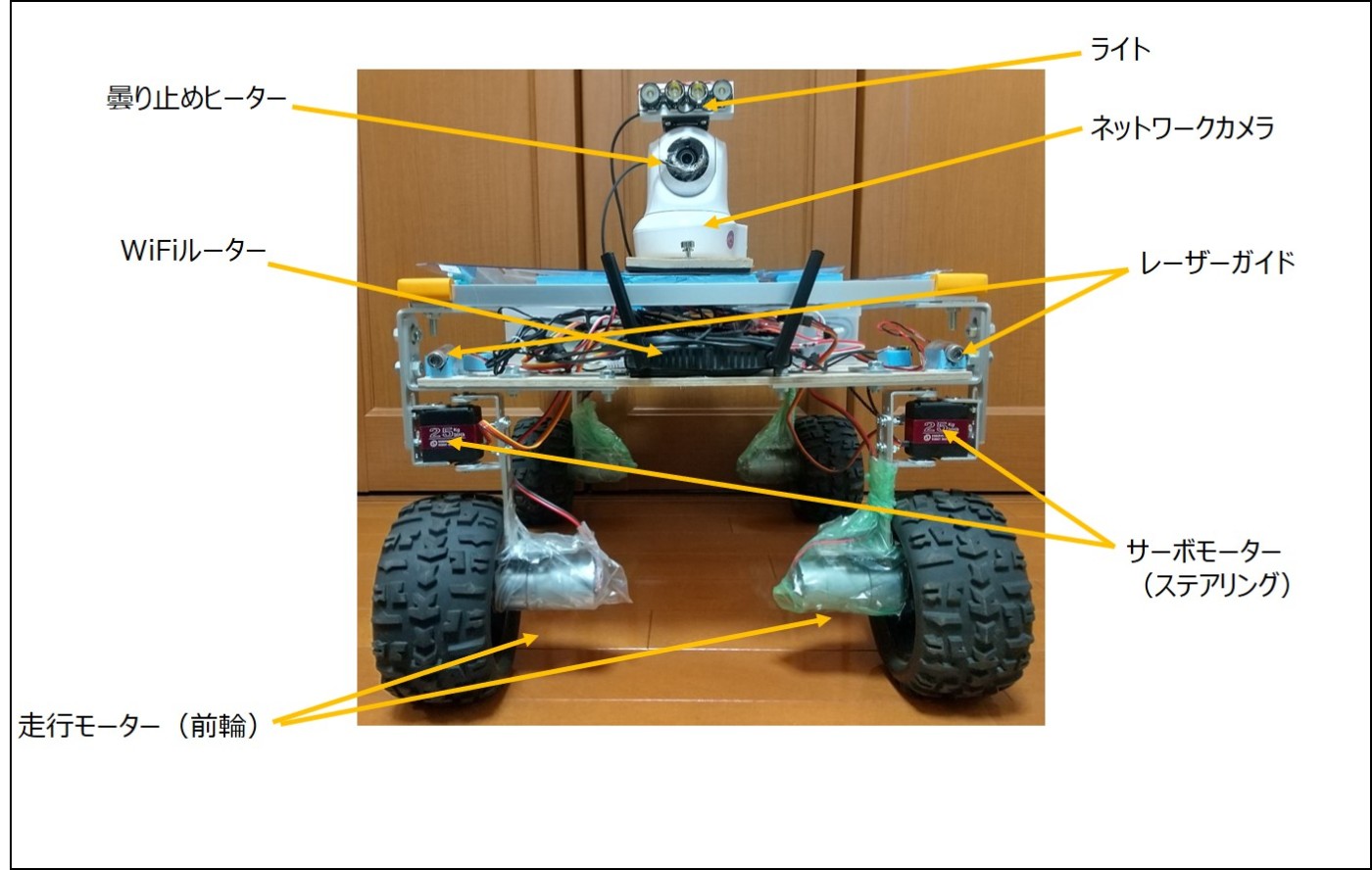
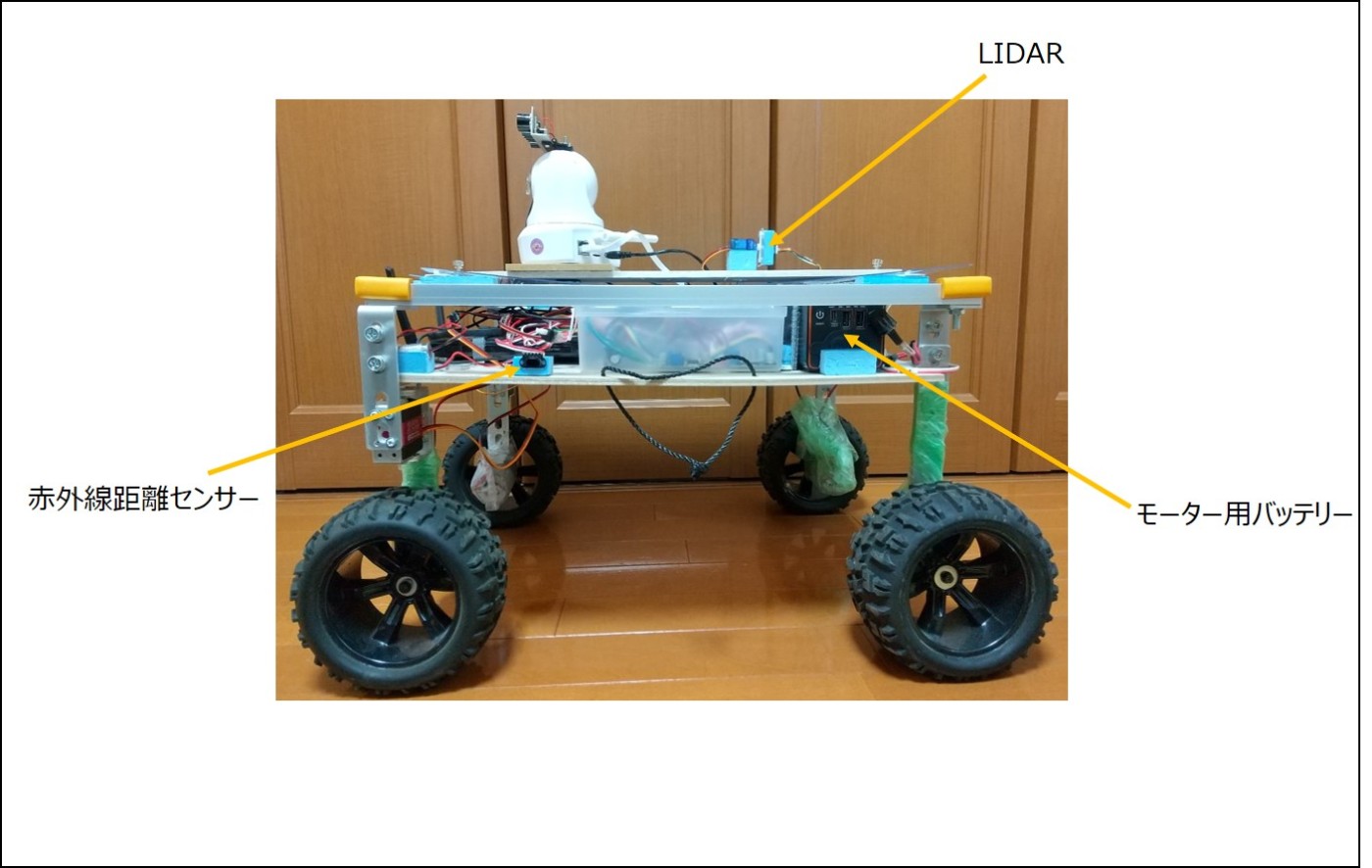
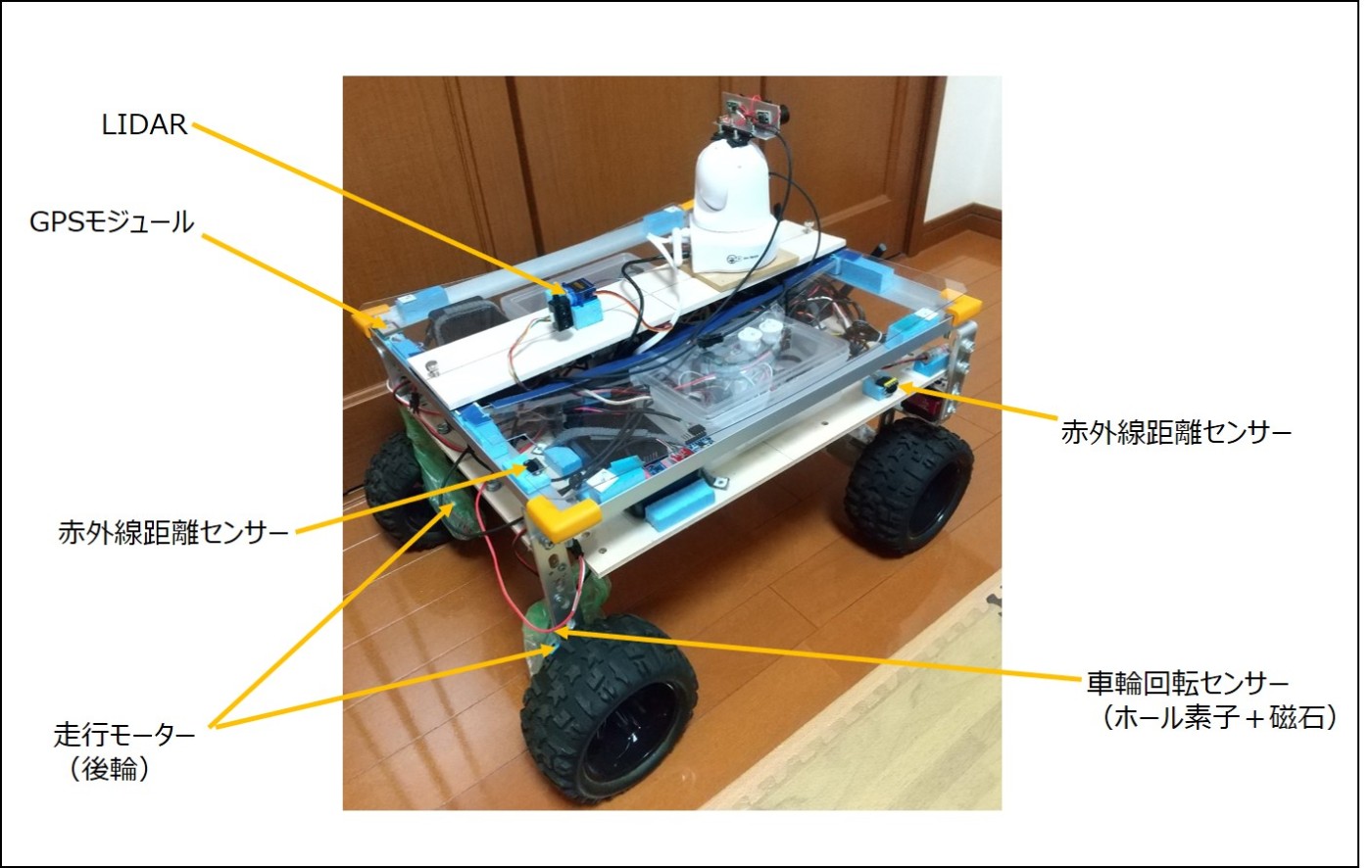
センサーなどの配置
コツコツアップデートしてたらいつの間にかものすごい多機能になってる・・・

Discussion