📸
unreal engine5で作成した環境内でロボットをナビゲーションしながYOLOを動かす方法
初めに
環境構築などは下にリンクを参照ください。
YOLOをダウンロードします。
condaなどを行っているとcolcon buildがうまく行かない場合などありますのでpythonの環境にはにはご注意ください。
新しいターミナルを開きます。
mkdir -p ws_yolov5/src && cd ws_yolov5/src
git clone https://github.com/Ar-Ray-code/YOLOv5-ROS.git
git clone https://github.com/Ar-Ray-code/bbox_ex_msgs.git
pip3 install -r ./YOLOv5-ROS/requirements.txt
cd ws_yolov5
colcon build --symlink-install && source install/local_setup.bash
上記をターミナル内で実行することでROS2でYOLOを使用することができます。
cameraの設置
turtlebotにカメラを設置しましょう
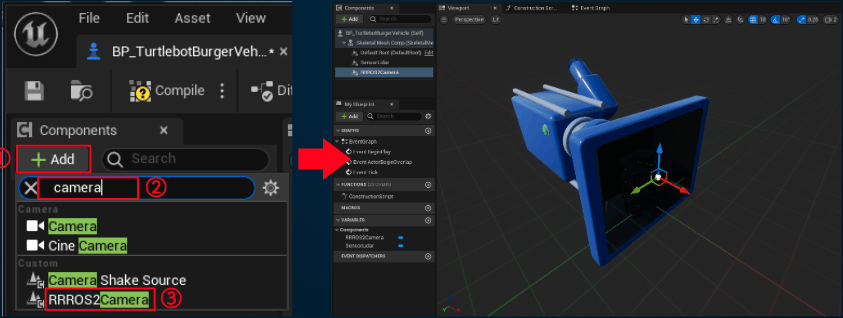
カメラの大きさを小さくします。
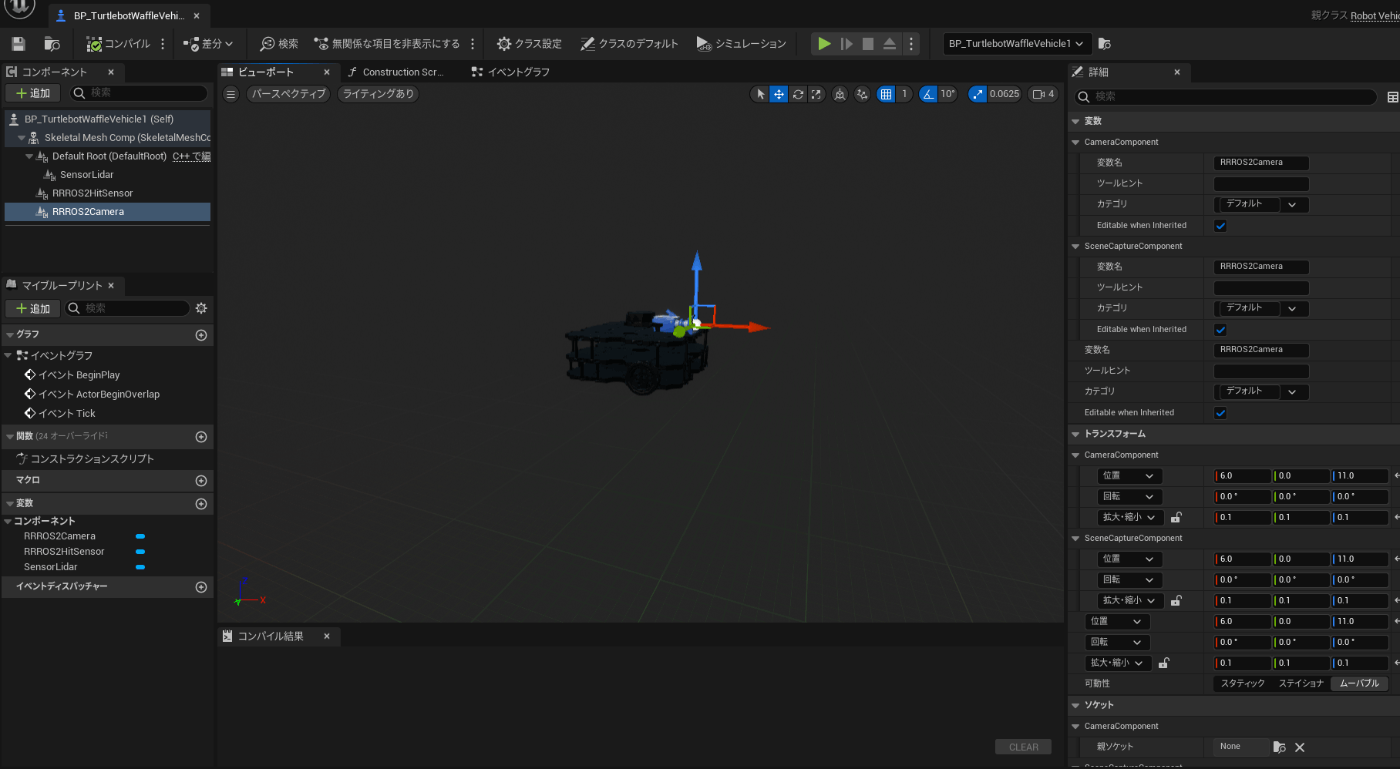
そして名前を変更します。
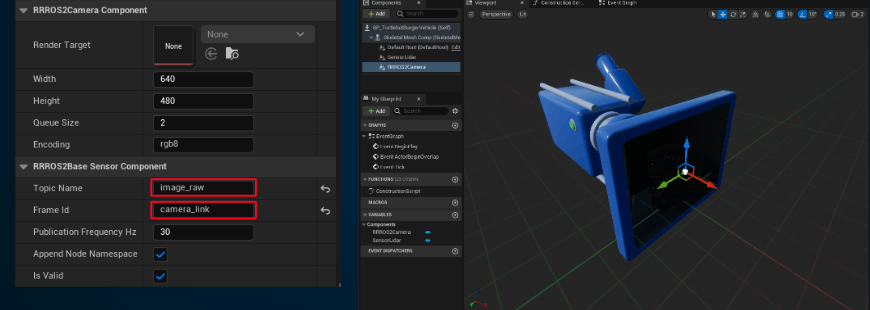
そしてコンパイルと保存をします。
コードの変更
main.py

yolov5s_simple.launch.py
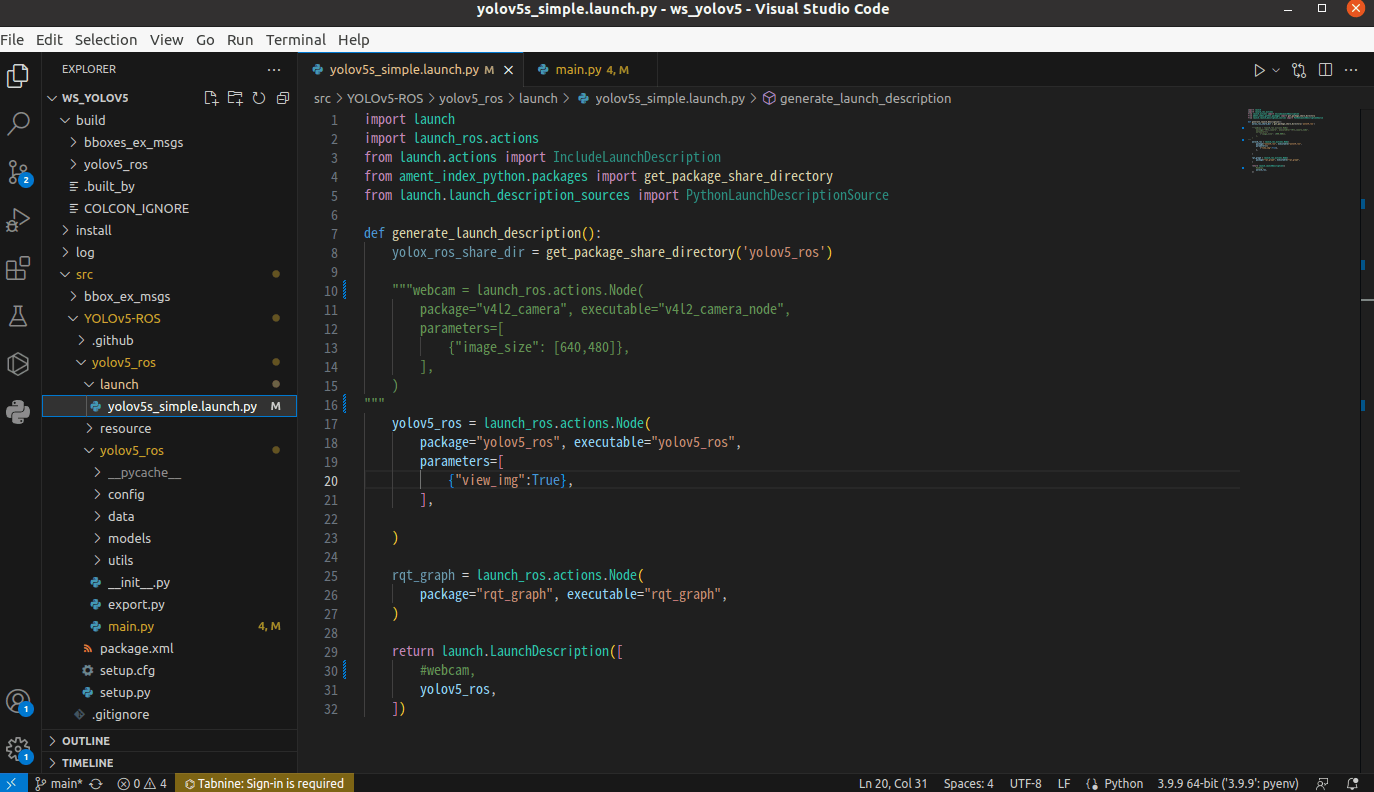
上記の2つのようにコードを変更します。
実行
cd turtlebot3-UE && source fastdds_setup.sh
ros2 launch yolov5_ros yolov5s_simple.launch.py
そうするとこのようになります。
Discussion