そのうち調べたいことMemo
ECUテストのプログラミングをもっと効率的に~ CAPLの基礎と使用上のヒント&コツ ~
はじめてのCAPL
CANoe CANLayzerでCAPLを使用
エンジニアと学びのコミュニティ参考

図の説明:
●各参加者は、AUTOSARにおけるソフトウェアモジュールを表しています。
●矢印は、データや制御信号の流れを表しています。
●矢印のラベルは、送受信されるデータの種類を示しています。
補足:
●このシーケンス図は、一般的なCAN通信の流れを示したものであり、詳細な処理は省略されています。
●実際の処理では、各モジュール間でさらに多くの信号がやり取りされます。
●各モジュールの詳細な動作については、AUTOSARの仕様書を参照してください。
CAN通信の処理の流れ
AUTOSARにおけるCAN通信の処理の流れは、以下のようになります。
- アプリケーション層: アプリケーション層が送信したいデータがあれば、それをPDU Router(PdUR)に渡します。
- PDU Router: PdURは、送信先のECUやデータの種類に応じて、適切な通信経路(例えば、CAN)を選択します。
- CAN Transport Layer (CanTp): CanTpモジュールは、アプリケーション層から受け取ったデータがCANフレームの最大ペイロードサイズより大きい場合、データを複数のCANフレームに分割します。また、受信したデータはCanTpによって再構成されます。
- CAN Interface (CanIf): CanIfモジュールは、CanTpモジュールから受け取ったデータ(あるいは分割されたデータ)を、ハードウェアに依存しない形式のL-PDUに変換します。CanIfはまた、下位層のCAN Driverモジュールからの通知を上位層に伝えたり、上位層からの指示を下位層に伝えます。
- CAN State Manager (CanSM): CanSMモジュールは、CANネットワークの通信状態を管理します。例えば、ECUの起動時やスリープからの復帰時など、ECUの状態変化に応じて、CanIfモジュールに指示を出し、CANコントローラの動作モードを制御します。
- CAN Driver: CAN Driverモジュールは、CANコントローラのハードウェアを直接制御します。CanIfモジュールからの指示に従って、CANフレームの送受信を行います。
- CAN Transceiver Driver (CanTrcv): CanTrcvモジュールは、CANトランシーバのハードウェアを制御し、CANコントローラとCANバス間の物理的な接続を管理します。CanSMモジュールからの指示に従って、トランシーバの動作モード(通常、スタンバイ、スリープ)を制御します。
参照すべきAUTOSARの仕様書名
上記の処理の流れに関わるAUTOSARの仕様書名は以下の通りです。
- AUTOSAR_SRS_CAN.pdf: CANモジュール全般の要求仕様書
- AUTOSAR_SWS_CANInterface.pdf: CanIfモジュールのソフトウェア仕様書
- AUTOSAR_SWS_CANNetworkManagement.pdf: CanNmモジュールのソフトウェア仕様書
- AUTOSAR_SWS_CANStateManager.pdf: CanSMモジュールのソフトウェア仕様書
- AUTOSAR_SWS_CANTransceiverDriver.pdf: CanTrcvモジュールのソフトウェア仕様書
- AUTOSAR_SWS_CANTransportLayer.pdf: CanTpモジュールのソフトウェア仕様書
これらの仕様書を参照することで、CAN通信の処理の流れや各モジュールの詳細な仕様について理解を深めることができます。
AUTOSARにおける診断の流れ
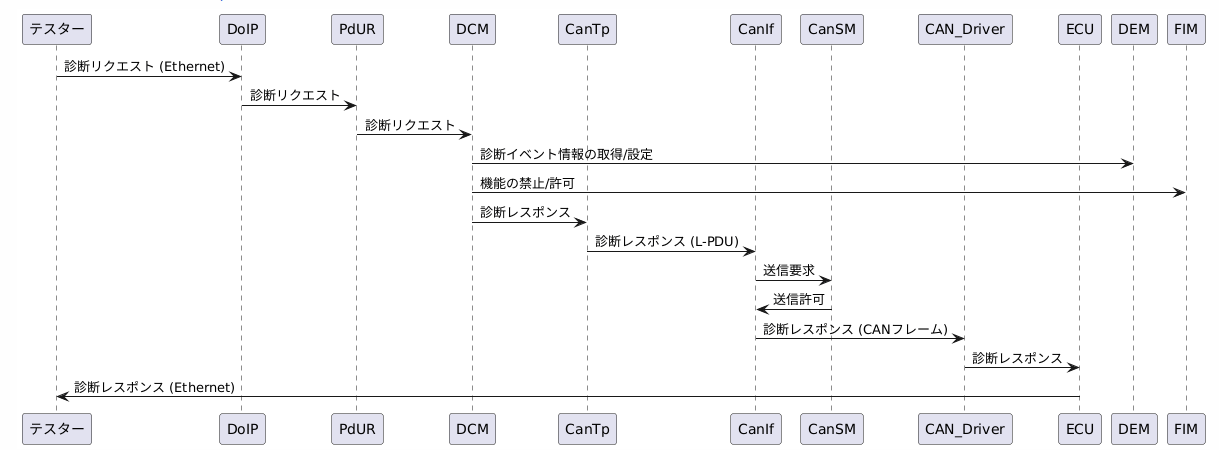
図の説明:
●各参加者は、診断プロセスに関与するモジュールまたはECUを表しています。
●矢印は、データや制御信号の流れを表しています。
●矢印のラベルは、送受信されるデータの種類を示しています。
補足:
●この図は、一般的な診断の流れを示したものであり、詳細な処理は省略されています。
●実際の処理では、各モジュール間でさらに多くの信号がやり取りされます。
●各モジュールの詳細な動作については、AUTOSARの仕様書を参照してください。
各モジュールの役割:
●テスター: 診断リクエストを送信し、ECUからの診断レスポンスを受信します。
●DoIP: Ethernetを介した診断通信を処理します。
●PdUR: 診断リクエストを含む様々な種類のPDUを、適切なモジュールにルーティングします。
●DCM: 診断サービス全体を管理する中心的なモジュールです。
●DEM: ECU内で発生する診断イベントを管理します。
●FIM: 診断イベント発生時に、特定の機能の実行を禁止します。
●CanTp: 大きなサイズのデータを複数のCANフレームに分割して送信、または受信した複数のフレームを結合します。
●CanIf: 上位層と下位層の間のインターフェースを提供します。
●CanSM: CANネットワークの通信状態を管理します。
●CAN Driver: CANコントローラーを制御し、CANフレームの送受信を行います。
●ECU: 診断対象のECUです。
参照すべきAUTOSAR仕様書:
●AUTOSAR_SWS_DiagnosticCommunicationManager.pdf: DCMのソフトウェア仕様書です。●AUTOSAR_SWS_DiagnosticOverIP.pdf: DoIPのソフトウェア仕様書です。●AUTOSAR_SWS_PDURouter.pdf: PdURのソフトウェア仕様書です。
●AUTOSAR_SWS_DiagnosticEventManager.pdf: DEMのソフトウェア仕様書です。
●AUTOSAR_SWS_FunctionInhibitionManager.pdf: FIMのソフトウェア仕様書です。
●AUTOSAR_SWS_CANTransportLayer.pdf: CanTpのソフトウェア仕様書です。
●AUTOSAR_SWS_CANInterface.pdf: CanIfのソフトウェア仕様書です。
●AUTOSAR_SWS_CANStateManager.pdf: CanSMのソフトウェア仕様書です。
ソースは、AUTOSARにおけるCAN通信の様々な側面について説明していますが、包括的な診断の流れを示す情報は含まれていません。
しかし、ソースから診断プロセスに関与する主要なモジュールとその役割を理解することができます。
- Diagnostic Communication Manager (DCM): DCMは、診断サービス全体を管理する中心的なモジュールです。診断リクエストの受信、解釈、処理、そしてレスポンスの送信などを制御します。
- PDU Router (PdUR): PdURは、診断リクエストを含む様々な種類のPDU(Protocol Data Unit)を、適切なモジュールにルーティングします。例えば、DCMから送信された診断レスポンスをCanIfモジュールに転送したり、CanIfモジュールから受信した診断リクエストをDCMに転送します。
- CAN Transport Layer (CanTp): CanTpは、診断リクエストやレスポンスなど、大きなサイズのデータを複数のCANフレームに分割して送信、または受信した複数のフレームを結合して元のデータに再構成します。
- CAN Interface (CanIf): CanIfは、上位層(例えば、CanTp, PdUR, DCM)と下位層(CAN Driver)の間のインターフェースを提供します。診断リクエストやレスポンスの送受信は、最終的にCanIfモジュールを介して行われます。
- CAN State Manager (CanSM): CanSMは、CANネットワークの通信状態を管理します。診断処理に関連する状態遷移(例えば、診断セッション開始時の状態遷移)などもCanSMによって制御されます。
- Diagnostic Event Manager (DEM): DEMは、ECU内で発生する診断イベント(例えば、センサーの故障)を管理します。DEMは、診断イベントを検出し、診断トラブルコード (DTC) を生成し、DTC情報をメモリに保存します。外部テスターからのDTC読み出しリクエストに対しては、DEMが保存しているDTC情報を提供します。
- Function Inhibition Manager (FIM): FIMは、診断イベント発生時に、特定の機能の実行を禁止する役割を担います。例えば、エンジン温度センサーの故障が検出された場合、FIMはエンジン制御機能の実行を禁止することができます。
これらのモジュールは連携して動作し、診断リクエストの送受信、データ処理、診断イベントの管理、機能の禁止などを実行します。
診断の流れをより具体的に理解するためには、以下の要素を明確にする必要があります。
- 使用される診断プロトコル: UDS、KWP2000、J1939など、様々な診断プロトコルが存在します。プロトコルによって、診断リクエスト/レスポンスのフォーマットや、サポートされる診断サービスなどが異なります。
- 診断リクエストの種類: DTCの読み出し、パラメータの変更、ルーチン制御など、様々な種類の診断リクエストが存在します。リクエストの種類によって、処理の流れや関与するモジュールが異なります。
- 診断通信に関わるECU: テスター、診断対象ECUなど、診断通信に関わるECUとその役割を明確にする必要があります。
参照すべきAUTOSAR仕様書
診断の流れを理解するために参照すべきAUTOSAR仕様書は以下の通りです。
- AUTOSAR_EXP_ErrorDescription.pdf: AUTOSAR標準エラーの説明を提供します。診断イベントやエラー処理に関する概要的な説明が含まれています。
- AUTOSAR_RS_DiagnosticExtractTemplate.pdf: 診断抽出テンプレートの要求仕様書です。
- AUTOSAR_SWS_CANInterface.pdf: CanIfモジュールのソフトウェア仕様書です。
- AUTOSAR_SWS_CANNetworkManagement.pdf: CanNmモジュールのソフトウェア仕様書です。
- AUTOSAR_SWS_CANStateManager.pdf: CanSMモジュールのソフトウェア仕様書です。
- AUTOSAR_SWS_CANTransportLayer.pdf: CanTpモジュールのソフトウェア仕様書です。
- AUTOSAR_SWS_COM.pdf: COMモジュールのソフトウェア仕様書です。
- AUTOSAR_SWS_CoreTest.pdf: Core Testモジュールのソフトウェア仕様書です。
- AUTOSAR_SWS_DiagnosticOverIP.pdf: DoIPモジュールのソフトウェア仕様書です。
- AUTOSAR_SWS_PDURouter.pdf: PdURモジュールのソフトウェア仕様書です。
これらの仕様書を参照することで、診断プロセスに関与する各モジュールの詳細な仕様、診断関連のデータフロー、エラー処理などを理解することができます。
注記:
上記の回答は、提供されたソースに基づいて作成されています。具体的な診断の流れは、実装されるシステムや使用する診断プロトコルによって異なる場合があります。より詳細な情報については、関連する診断仕様書やシステム設計書を参照する必要があるかもしれません.
CAN通信の流れ
ソースに基づいて、AUTOSARにおけるCAN通信の流れ、特にData Element値やSignal値の役割を含めて説明し、図示します。
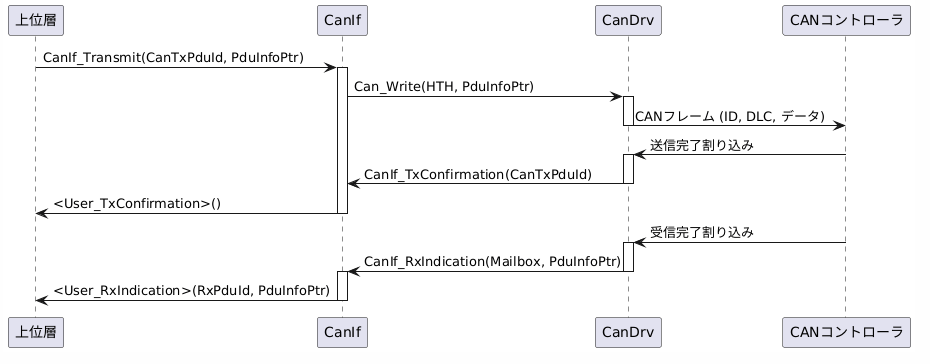
送信時の流れ
-
上位層からの送信要求: 上位層 (例: アプリケーション、診断モジュール) が
CanIf_Transmit()関数を呼び出し、送信したいL-SDU (CAN Service Data Unit) をCanIfに渡します。-
CanTxPduId: 送信するL-SDUを一意に識別するID。 -
PduInfoPtr: 送信するL-SDUのデータ長 (SduLength) やデータへのポインタ (SduDataPtr)、メタデータへのポインタを含む構造体へのポインタ。 - メタデータ: PDU (Protocol Data Unit) に付随する追加情報。例えば、J1939 I-PDUではCAN IDを含む。
-
-
CanIfによる処理: CanIfは
CanTxPduIdをもとに、対応するHTH (Hardware Transmit Handle) を特定し、Can_Write()関数を呼び出してCan Driverに送信を要求します。- HTH: CAN Driverが管理する送信用ハードウェアオブジェクト (例: CAN送信バッファ) を識別するハンドル。
-
Can Driverによる処理: Can Driverは、
- 必要に応じて、L-PDU (CAN Protocol Data Unit) の内容 (ID, データ長) をハードウェア固有の形式に変換します。
- CANコントローラ内の適切な送信バッファにL-PDUを書き込みます。
- 送信要求をCANコントローラに設定し、送信を実行します。
- CAN ID: CANフレームの識別子。
- DLC (Data Length Code): CANフレームのデータ長を示すコード。
- データ: 実際に送信されるデータ (最大8バイト、CAN FDの場合は最大64バイト)。
-
送信完了通知: Can Driverは送信が完了すると、CanIfの
CanIf_TxConfirmation()関数を呼び出して上位層に通知します。-
CanTxPduId: 送信完了したL-SDUのID。
-
-
上位層への通知: CanIfは、
CanTxPduIdに対応する上位層モジュール (例: アプリケーション) のコールバック関数<User_TxConfirmation>()を呼び出し、送信完了を通知します。
受信時の流れ
-
CANコントローラによる受信: CANコントローラがCANバスからCANフレームを受信します。
-
Can Driverによる処理: Can Driverは、
- 受信したCANフレームを処理し、L-PDUを生成します。
- 必要に応じて、L-PDUのデータ (バイトオーダーなど) をAUTOSARの定義に合わせて正規化します。
- CanIfの
CanIf_RxIndication()関数を呼び出して、上位層に受信を通知します。-
Mailbox: 受信に使用されたHRH (Hardware Receive Handle) と対応するCANコントローラを識別する情報。 -
PduInfoPtr: 受信したL-PDUへのポインタ。
-
-
CanIfによる処理: CanIfは、
- 受信したL-PDUの受け入れ可否を評価します。
- ソフトウェアフィルタリング: 受信したL-PDUがこのECUで処理すべきものかどうかをチェックします。
- データ長チェック: 受信したL-PDUのデータ長が、設定されたデータ長と一致するかどうかをチェックします。
- 受け入れ可能と判断された場合、上位層モジュールに受信を通知します。
- メタデータが設定されている場合は、PDUペイロードを静的受信バッファにコピーし、CAN IDをCAN_ID_32型のメタデータアイテムにコピーします。
-
上位層への通知: CanIfは、
RxPduIdに対応する上位層モジュールのコールバック関数<User_RxIndication>()を呼び出し、受信を通知します。-
RxPduId: 受信したL-SDUのID。 -
PduInfoPtr: 受信したL-SDUのデータ長 (SduLength)、データへのポインタ (SduDataPtr)、メタデータを含む構造体へのポインタ。
-
Data Element値とSignal値について
- Data Element: AUTOSAR COMモジュールにおいて、信号 (Signal) を構成する基本的なデータ単位です。上位層アプリケーションは、Data Elementを介して信号の値を読み書きします。
- Signal: AUTOSAR COMモジュールにおいて、通信されるデータの単位です。Signalは、1つ以上のData Elementで構成されます。
- Can Driverは、Signal値やData Element値を直接扱うことはありません。Can Driverは、上位層から渡されたL-PDUをCANフレームに変換して送信し、受信したCANフレームをL-PDUに変換して上位層に渡す役割を担います。
- Signal値やData Element値は、CanIfよりも上位の層 (例: AUTOSAR COM, CanNm, CanTp) で処理されます。
CAN通信の流れの図
参照すべきAUTOSARドキュメント
- AUTOSAR_SWS_CANInterface.pdf: CanIfのソフトウェア仕様書
- AUTOSAR_SWS_CANDriver.pdf: Can Driverのソフトウェア仕様書
- AUTOSAR_SWS_COM.pdf: AUTOSAR COMモジュールのソフトウェア仕様書
注意: 上記の説明は、提供されたソースに基づいており、実装や設定によって異なる場合があります。
CAN通信の処理の流れ (送信側と受信側)
AN通信の処理の流れを、送信側と受信側に分けて2つの図で示します。
図1: 送信側の処理の流れ
説明:
-
SW-Cからのデータ送信: SW-C (Software Component) から、RTE (Runtime Environment) を介して、
Rte_Write()APIを用いてDE (Data Element) の値が送信されます。 -
COMによる送信データ設定: DEの値は、COM (AUTOSAR COM, Communication) に渡され、DEに対応付けられたCANメッセージ内のシグナルに対して送信値が設定されます。
-
COMによる送信タイミング管理: COMは、送信タイミングとして、周期送信 (PERIODIC)、イベント送信 (DIRECT with/without repetition)、およびその両者の組み合わせ (MIXED) を管理します。
- イベント送信では、1回のイベントに対して複数回送信することも可能です。
-
PDUのルーティング: 送信タイミングを迎えると、COMからPduR (PDU Router) に送信PDUの内容が渡されます。
- PDU (Protocol Data Unit) は、CANメッセージで授受される内容です。
-
CanIfへのPDU転送: PduRは、CanIf (CAN Interface) に送信PDUを引き渡します。
-
Can Driverによる送信処理:
- CanIfは、Can Driverに
Can_Write()関数を呼び出して送信を要求します。 - Can Driverは、PDUの内容をCANコントローラ内のメールボックスに格納し、ハードウェアに対する送信要求をセットします。
- この際、送信PDUは、CAN ID、DLC (Data Length Code)、およびデータ (最大8バイト、CAN FDの場合は最大64バイト) を含むCANフレームに変換されます。
- CanIfは、Can Driverに
図2: 受信側の処理の流れ
説明:
-
CANコントローラによる受信: CANコントローラがCANバスからCANフレームを受信します。
-
Can Driverによる受信処理:
- Can Driverは、受信したCANフレームを処理し、L-PDU (Link Layer Protocol Data Unit) を生成します。
- 必要に応じて、L-PDUのデータ (バイトオーダーなど) をAUTOSARの定義に合わせて正規化します。
- CanIfの
CanIf_RxIndication()関数を呼び出して、上位層に受信を通知します。-
Mailbox: 受信に使用されたHRH (Hardware Receive Handle) と対応するCANコントローラを識別する情報。 -
PduInfoPtr: 受信したL-PDUへのポインタ。
-
-
CanIfによる受信PDUの受け渡し: CanIfは、受信したPDUをPduRに渡します。
-
PDUのルーティング: PduRは、受信したPDUをCOMにルーティングします。
-
COMによる受信データ処理: COMは、受信したPDUからDE (Data Element) の値を抽出し、RTEに渡します。
-
SW-Cへのデータ受け渡し: RTEは、受信したDEの値を、対応するSW-Cに渡します。
注記: 上記の説明は、与えられた情報に基づいており、実装や設定によって異なる場合があります。
CAN通信
1. CAN通信の概要
CAN通信は、以下の特徴を持つ通信方式です。
| 特徴 | 説明 |
|---|---|
| マルチマスタ | 複数のノードがバスを共有し、いずれのノードも送信することができます。 |
| ブロードキャスト | メッセージは、すべてのノードに送信され、受信ノードは自身に必要なメッセージのみを受信します。 |
| ノンデスティネーション | メッセージには送信先アドレスが含まれず、代わりにCAN IDを用いてメッセージの内容を識別します。 |
| エラー検出機能 | CAN通信には、CRCやACKなどのエラー検出機能が組み込まれており、信頼性の高い通信を実現します。 |
2. CANメッセージフレーム
CAN通信では、データをCANメッセージフレームと呼ばれるフォーマットで送受信します。
- 標準フレーム(11bit ID): CAN 2.0Aで規定されているフレーム形式。最大2048種類のIDを使用できます。
- 拡張フレーム(29bit ID): CAN 2.0Bで規定されているフレーム形式。最大約2億6800万種類のIDを使用できます。
| 項目 | 説明 |
|---|---|
| SOF | フレーム開始を示すビット |
| 仲裁フィールド | CAN IDが含まれ、メッセージの優先順位を決定します。IDが小さいほど優先順位が高くなります。標準フレームでは11bit、拡張フレームでは29bitのIDが使用されます。 |
| コントロールフィールド | データ長コード (DLC) やフレームの種類 (標準/拡張) などの情報が含まれます。 |
| データフィールド | 送信するデータが格納されます。最大8バイトのデータを格納することができます。 |
| CRCフィールド | データの誤り検出のために使用されます。 |
| ACKフィールド | 受信ノードがメッセージを正しく受信できたことを送信ノードに通知するために使用されます。 |
| EOF | フレーム終了を示すビット |
3. CAN通信におけるソフトウェアアーキテクチャ (AUTOSAR)
AUTOSARでは、CAN通信に関わるソフトウェアを以下の階層構造で定義しています。
- アプリケーション層: メッセージの内容を解釈し、処理するソフトウェアコンポーネント。
- RTE (Runtime Environment): アプリケーション層とベーシックソフトウェア層間の通信を仲介するソフトウェア。
- ベーシックソフトウェア(BSW)層: ハードウェアを抽象化し、上位層に統一的なインターフェースを提供するソフトウェア群。
- マイクロコントローラ: CANコントローラを含むハードウェア。
BSWにおけるCAN通信関連モジュール
BSW層には、CAN通信に関連する以下のモジュールが存在します。
| モジュール | 説明 |
|---|---|
| Can | CANコントローラのハードウェアを直接制御するドライバソフトウェア。 |
| CanIf | Can Driverと上位層 (PduR) の間のインターフェースを提供し、ハードウェアに依存しない通信を実現します。 |
| CanNm | ネットワーク管理 (Network Management) を担当するモジュール。ノードのオンライン/オフライン状態の管理や、ネットワークのスリープ/ウェイクアップ制御などを行います。 |
| CanSM | CAN State Manager。CANコントローラの状態管理 (スタート、ストップ、ウェイクアップなど) を行います。 |
| CanTp | CAN Transport Layer。CANメッセージの分割/結合を行い、上位層に大きなデータを送受信する機能を提供します。 |
| PduR | PDU Router。様々な通信経路 (CAN, LIN, FlexRayなど) のPDU (Protocol Data Unit) をルーティングするモジュール。CanIfと上位層 (例: Com, Dcm) との間のデータ送受信を仲介します。 |
4. 送信処理の流れ
アプリケーション層から送信要求が発生した場合の処理の流れをUMLシーケンス図で示します。
説明:
- アプリケーション層からの送信要求: アプリケーション層は、送信するデータとCAN IDを指定して、RTEを介して送信要求を行います。
- PduRによるルーティング: PduRは、送信要求されたPDUを適切な通信経路 (ここではCAN) にルーティングします。
- CanIfによる送信: CanIfは、Can DriverのCan_Write()関数を呼び出し、HTHと送信データを渡します。
- Can Driverによる送信処理: Can Driverは、HTHに対応するMailboxに送信データを設定し、CANコントローラに送信を指示します。
- CANコントローラによる送信: CANコントローラは、Mailboxに設定されたCANメッセージフレームをCANバスに送信します。
- 送信完了の通知: 送信が完了すると、Can DriverはCanIf_TxConfirmation()関数を呼び出して、CanIfに送信完了を通知します。
5. CAN通信のコンフィグレーション
CAN通信を行うためには、使用するマイコン、CANコントローラ、およびAUTOSAR BSWモジュールの設定を行う必要があります。設定は、通常、AUTOSAR ECU Configuration Editor (ECUC) などのツールを用いて行います。
主な設定項目
- CANコントローラの初期化: ボーレート、モード (標準/拡張) など
- Mailboxの設定: CAN ID, マスク, データ長, 送受信方向など
- CanIfの設定: HRHとMailboxのマッピング, BasicCAN/FullCANの設定など
- CanNm, CanSM, CanTpの設定: ネットワーク管理, 状態管理, トランスポート層の動作に関する設定
ソースからの情報
AUTOSARからは、以下の設定に関する情報を得ることができました。
-
Can Driver:
- 標準/拡張IDのサポート
- 複数の送信Mailbox (HTH) の設定
- ボーレート変更APIのサポート
- ECUパーティションへのマッピング
- コントローラのアクティブ/非アクティブ設定
- ウェイクアップサポート
- ハードウェアオブジェクトの種類 (FullCAN/BasicCAN)
-
CanIf:
- ダイナミックL-PDUのサポート (実行時にCan IDを変更可能)
- 上位層モジュールへの通知関数の設定 (例: CanTp, XCP)
- ボーレート変更APIのサポート
- 送受信L-PDUのCAN IDタイプ (標準/拡張)
- 受信L-PDUのHRH ID参照
- CAN IDレンジの設定
-
CanNm:
- ネットワーク管理状態遷移
- PN (Partial Networking) のサポート
- ユーザデータサポート
- 送受信PDU IDの設定
- チャンネル設定 (Nmサイクルタイム, ネットワーク要求処理)
- Rx/Tx PDU, ユーザデータPDUの設定
-
CanSM:
- 内部状態定義 (INITED, UNINITED)
- ポストビルドパラメータ
- ICOMサポート
- ECUパッシブ機能のサポート
- ComMネットワークハンドル参照
- コントローラID, Demイベントパラメータ参照の設定
-
CanTp:
- 汎用コネクションサポート
- 送信Fc/NSdu, 受信NSdu/NPduの設定
-
PduR:
- 上位層モジュールによるタグ使用の可否
補足
これらの情報は、特定のマイコンやCANコントローラの仕様によって異なる場合があります。 特定のハードウェアや設定の詳細については、各メーカーのドキュメントを参照する必要があります。
Mailboxについて
CAN通信におけるMailbox
Mailboxは、CANコントローラ内部にあるメモリ領域で、CANメッセージの送受信に使用されます。送信Mailboxには、送信するCANメッセージフレームが格納され、CANコントローラによってCANバスに送信されます。受信Mailboxには、CANバスから受信したCANメッセージフレームが格納されます。
ソースにおけるMailbox関連情報
ソースでは、Mailboxという用語は直接使用されていませんが、関連する概念として以下のものがあります。
- ハードウェア送信ハンドル (HTH): CanIfモジュールがCan Driverに送信要求を行う際に使用するハンドルで、送信Mailboxに対応します。
- HRH (Hardware Receive Handle): CanIfモジュールが受信したCANメッセージを識別するために使用するハンドルで、受信Mailboxに対応します。
- Can_HwType: CanIf_RxIndication()関数のパラメータとして使用され、HRHと対応するCANコントローラを識別します。
これらの情報は、CanIfモジュールがHTHを使用して送信Mailboxを指定し、HRHを使用して受信Mailboxを管理していることを示唆しています。
Mailboxの設定
Mailboxの設定は、通常、使用するマイコンやCANコントローラの仕様によって異なりますが、一般的には以下の項目を設定します。
- CAN ID: 受信するメッセージを識別するためのID
- マスク: 受信するメッセージのIDをフィルタリングするためのマスク
- データ長: 送受信するデータの長さ
- 送受信方向: 送信専用、受信専用、または送受信兼用
これらの設定は、通常、AUTOSAR ECU Configuration Editor (ECUC) などのツールを用いて行います。
L-PDU、L-SDU、I-PDU の比較と通信処理における順序
| 項目 | フルスペル | 日本語 | 処理順序 | 説明 |
|---|---|---|---|---|
| I-PDU | Interaction Layer Protocol Data Unit | インタラクション層のプロトコルデータユニット | 1 | AUTOSAR COM モジュールによって組み立て、分解されます。1つ以上のシグナルで構成され、上位層のソフトウェアコンポーネント間でデータを交換するために使用されます。 |
| L-SDU | Data Link Layer Service Data Unit | データリンク層のサービスデータユニット | 2 | L-PDU の内部で転送されるデータです。上位層から渡された I-PDU データが格納されます。 |
| L-PDU | Data Link Layer Protocol Data Unit | データリンク層のプロトコルデータユニット | 3 | データリンク層で処理されるデータユニットです。識別子、データ長 (DLC)、そしてデータ (L-SDU) で構成されます。 CAN通信では、CANフレームとして送信されます。 |
通信処理の流れ
- 上位層で生成されたデータは、I-PDU に組み立てられます。
- I-PDU は L-SDU として L-PDU に格納されます。
- L-PDU は CAN ドライバ を介して物理層に送信されます。
補足
- 各用語はOSI参照モデルの異なる層に属します。
- I-PDU: インタラクション層
- L-SDU, L-PDU: データリンク層
- AUTOSAR (Automotive Open System Architecture) は、車載ソフトウェア開発のための標準規格です。
この表は、提供されたソースから得られた情報に基づいています。
ヒューマンエラー対策
4M5E
4M5E分析は、製造業やサービス業における品質管理や改善活動に使われる手法です。4Mとは「マシン(Machine)」、「メンタル(Mental)」、「材料(Material)」、「方法(Method)」の4つの要素を指し、5Eとは「教育訓練(EDUCATION))」、「強化徹底(ENFORCEMENT)」、「強化徹底(ENFORCEMENT)」、「模範事例(EXAMPLE)」、「環境背景(ENVIRONMENT))」の5つのステップを指します。
この分析手法は、製品やサービスの品質を向上させるために、各要素を詳細に分析し、改善点を見つけ出すことを目的としています。具体的には、以下のようなプロセスを含みます:
-
マシン(Machine): 製造機械や設備の状態を確認し、故障や劣化がないかをチェックします。
-
メディア(Medial): 情報の取得や交換に関する要因・環境的な要因を提供します。
-
材料(Material): 使用する原材料や部品の品質を確認し、不良品がないかをチェックします。
-
方法(Method): 製造プロセスや作業手順を見直し、効率化や品質向上のための改善点を見つけます。
-
教育訓練(EDUCATION): 業務を安全に実施するために必要な知識・意識・技術を教育・訓練で対策します。
-
技術工学(ENGINEERING): 機器や設備の対策を通じて安全性を向上させます。
-
強化徹底(ENFORCEMENT): 標準化やマニュアル化を強化・徹底し、業務の確実な実施を図ります。KYトレーニング(危険予知訓練)も含まれます。
-
模範事例(EXAMPLE): 成功事例や模範的行動を示し、具体的な事例を通じて周知します。
-
環境背景(ENVIRONMENT): 作業場の照度や温度、整理整頓、5S活動などを通じて物理的な作業環境を改善します。
この分析手法を活用することで、企業はより効果的に品質管理を行い、顧客満足度を向上させることができます。
| EDUCATION(教育訓練) | ENGINEERING(技術工学) | ENFORCEMENT(強化徹底) | EXAMPLE(模範事例) | ENVIRONMENT(環境背景) | |
|---|---|---|---|---|---|
| Machine(マシン) | エンジニアに新しいツールや技術の使用方法を教育するトレーニングを実施 | コード品質を向上させるためのリファクタリングツールの導入 | バグトラッキングシステムの強化と標準化 | 自動化テストツールの成功事例を共有 | 作業環境のPCやネットワークのアップグレード |
| Media(メディア) | 情報の共有や取得に関するトレーニングを実施 | チーム内での情報共有システムの導入 | ドキュメント管理システムの標準化 | 効率的な情報交換の模範事例を示す | コラボレーションツールの整備 |
| Material(材料) | コードレビューの手法やベストプラクティスの教育 | コードのライブラリやAPIの品質チェック | 標準化されたライブラリの使用の強化 | 高品質なライブラリ使用の成功事例 | 使用ライブラリの管理と整理 |
| Method(方法) | アジャイル開発手法やデザインパターンのトレーニング | ソフトウェア開発プロセスの最適化 | 開発手法の標準化と徹底 | 効率的な開発手法の事例を共有 | 作業手順や開発フローの整備 |
「m-SHELL」は、主に安全管理やリスク管理の分野で使用される概念です。このモデルは、管理(Management)、ソフトウェア(Software)、ハードウェア(Hardware)、環境(Environment)、そして人(Liveware)の5つの要素を組み合わせたものです。
このモデルは、リスクの発生源を全体的に把握し、それぞれの要素がどのように関連しているかを明確にすることで、より効果的なリスク対策を実施することを目指しています。
例えば、工場での作業環境を改善する際に、m-SHELLモデルを用いると、機械設備(ハードウェア)の状態、ソフトウェアの使用方法、作業環境(環境)の改善、従業員の教育訓練(人)など、全ての要素を総合的に評価し、最適な対策を講じることができます。
このモデルを使うことで、リスクの多様な要因を考慮し、より包括的な安全対策を実施することが可能になります。
ECRSは、Eliminate(除去)、Combine(統合)、Rearrange(再配置)、Simplify(簡素化)の頭文字を取ったもので、主にプロセス改善のための手法です。この手法は、製造業やサービス業など、さまざまな業界で使用されています。
ECRSの基本的な考え方は、以下の4つのステップを通じてプロセスの効率を向上させることです:
- Eliminate(除去): 不要なステップや作業を取り除く。
- Combine(統合): 類似する作業を統合し、効率を上げる。
- Rearrange(再配置): 作業の順序を見直し、効率的な流れを作る。
- Simplify(簡素化): 作業手順を簡略化し、複雑さを減らす。
この手法を用いることで、業務プロセスの効率化や生産性の向上が図れます。
なぜなぜ分析のやり方、やってはいけないこと、感情への対処について、情報源から以下の点が挙げられます。
なぜなぜ分析のやり方
- 情報源には、なぜなぜ分析という特定の分析手法に関する直接的な記述はありません。しかし、事故やエラーの原因を掘り下げることの重要性について言及している箇所が複数あります。
- 事故の背後には多数のインシデントやニアミスが存在すると言われており、それらの情報を継続的に収集・分析することで事故防止が可能になるとされています。
- ヒューマンエラーは、直接見ることができない様々な要因が積み重なった結果であるため、エラーが発生した状況を丁寧に追い、人間の認知特性と照らし合わせて、エラーにつながる分岐点を見つけ出す必要があるとされています。
- 作業手順を遡り、事故発生の元となった異変がいつ、どの段階で始まったのかを把握することが重要です。
- 「現場・現物・現状」を確認し、異常を感じたらすぐに行動することが推奨されています。
- 問題を放置せず、職場全体で共有し、解決の糸口を見つけることが大切です。
これらの記述から、なぜなぜ分析を行う際には、事実に基づき、多角的な視点から原因を掘り下げていくことが重要であると言えます。
やってはいけないこと
- 単なる注意喚起だけでは不十分であり、具体的な対策を講じる必要があるとされています。
- 定番のチェック方法を過信せず、常に工夫したチェックを実施することが重要です。
- 思い込みで作業を進めることは危険であり、特に産地や品種、年産が切り替わる際は注意が必要です。
- 問題を放置することは避けるべきであり、職場全体で共有し、解決策を検討する必要があります。
- 「これくらいでいいかな」という安易な気持ちは重大なミスにつながるため、慣れた時ほど慎重な対応が求められます。
- ルールを破ったり、確認を怠ったりすることは、ミスの原因となるため避けるべきです。
- 感情的な対応は避け、冷静に状況を把握し、対応を検討する必要があります。
- 複数の作業を同時に行おうとすると注意散漫になりエラーが多くなるため、注意資源を分散させるような作業の仕方は避ける必要があります。
感情への対処
- 発達障害のある人は、定型発達者よりもストレスを強く感じやすい可能性があるため、状況を説明するだけでなく、その状況で一般的に感じるストレスの度合いも考慮して伝える必要があります。
- 発達障害の特性として、他者との情緒的な交流や体験の共有が難しい場合があり、「相手に配慮した社会的に適切な行動」が難しい可能性が指摘されています。しかし、それは他者に配慮していないということではなく、行動の難しさがあるということを理解する必要があります。
- 自尊心が傷つきやすい場合や、不安やパニックに陥りやすい場合があるため、クールダウンする時間を与えるなどの配慮が必要です。
- 感情の混乱がある場合は、その時の感情に深く立ち入るのではなく、好きな話題に切り替えてあげることが良いとされています。
- 「顔を見るのが怖い」という感情がある場合は、無理に視線を合わせることを強要せず、「相手の気持ちを言葉で確認する」などの補完行動を促すことが重要です。
- 職場で不適応を起こしやすい状況では、対応マニュアルを作成するだけでなく、苦手な業務を外すなど、環境調整を行うことも有効です。
- コーチングは、画一的な人間を作ることを目指すのではなく、個人の能力を最大限に引き出すことを目的とします。統一的なやり方を押し付けるのではなく、個人の考える力を育てることが重要です。
- 作業者の意見を聴きながら、指導(コーチング)を行うことが、作業者の意識向上やモチベーション向上につながるとされています。
これらの情報から、感情への対処は、まず相手の感情を理解し、その上で、冷静な対応を心がけることが重要であると言えます。
上記をまとめると、なぜなぜ分析においては、客観的な事実に基づいて多角的な視点から原因を掘り下げることが重要です。感情的な対応や安易な対策は避けるべきであり、個人の特性を理解した上で、具体的な対策を講じることが望まれます。