M5StackでIMUユニットを使う
とりあえずサンプルコードで動かしてみる
今回はArduinoIDEを用いて実験をします。
M5Stack公式から出されているUiFlow-IDEを用いても良いのですが、アイコンが使いづらい上処理も遅いので好きじゃありません。
ぱぱっとArduinoIDEのスケッチ例からIMU.inoを選択し実行。
// define must ahead #include <M5Stack.h>
#define M5STACK_MPU6886
// #define M5STACK_MPU9250
// #define M5STACK_MPU6050
// #define M5STACK_200Q
#include <M5Stack.h>
float accX = 0.0F;
float accY = 0.0F;
float accZ = 0.0F;
float gyroX = 0.0F;
float gyroY = 0.0F;
float gyroZ = 0.0F;
float pitch = 0.0F;
float roll = 0.0F;
float yaw = 0.0F;
float temp = 0.0F;
// the setup routine runs once when M5Stack starts up
void setup(){
// Initialize the M5Stack object
M5.begin();
/*
Power chip connected to gpio21, gpio22, I2C device
Set battery charging voltage and current
If used battery, please call this function in your project
*/
M5.Power.begin();
M5.IMU.Init();
M5.Lcd.fillScreen(BLACK);
M5.Lcd.setTextColor(GREEN , BLACK);
M5.Lcd.setTextSize(2);
}
// the loop routine runs over and over again forever
void loop() {
// put your main code here, to run repeatedly:
M5.IMU.getGyroData(&gyroX,&gyroY,&gyroZ);
M5.IMU.getAccelData(&accX,&accY,&accZ);
M5.IMU.getAhrsData(&pitch,&roll,&yaw);
M5.IMU.getTempData(&temp);
M5.Lcd.setCursor(0, 20);
M5.Lcd.printf("%6.2f %6.2f %6.2f ", gyroX, gyroY, gyroZ);
M5.Lcd.setCursor(220, 42);
M5.Lcd.print(" o/s");
M5.Lcd.setCursor(0, 65);
M5.Lcd.printf(" %5.2f %5.2f %5.2f ", accX, accY, accZ);
M5.Lcd.setCursor(220, 87);
M5.Lcd.print(" G");
M5.Lcd.setCursor(0, 110);
M5.Lcd.printf(" %5.2f %5.2f %5.2f ", pitch, roll, yaw);
M5.Lcd.setCursor(220, 132);
M5.Lcd.print(" degree");
M5.Lcd.setCursor(0, 155);
M5.Lcd.printf("Temperature : %.2f C", temp);
delay(1);
}
一応、値を見ることができました。

しかしこのdegreeのyaw角ドリフトがある上に、回転する速度によって変化する値が結構変わってしまう、、、
yaw角を求めるプログラムを作る
yaw角以外の値はぱっと見正しそうなので今回はyaw角だけ求めるプログラムを自分で作ることにしました。
#define M5STACK_MPU6886
#define CALIBCOUNT 10000
#include <M5Stack.h>
float accX = 0.0F;
float accY = 0.0F;
float accZ = 0.0F;
float gyroX = 0.0F;
float gyroY = 0.0F;
float gyroZ = 0.0F;
float yaw = 0.0F;
float gyroOffsetZ = 0.0;
float preTime = 0.0F;
float dt = 0.0F;
float pregz = 0.0F;
float degree = 0;
int cnt = 0;
void calibration()
{
delay(1000);
M5.Lcd.printf("...");
float gyroSumZ = 0;
int count = CALIBCOUNT;
for (int i = 0; i < count; i++) {
M5.update();
float gyroZ;
M5.IMU.getGyroData(&gyroX, &gyroY, &gyroZ);
gyroSumZ += gyroZ;
if (M5.BtnB.wasPressed())
{
M5.Lcd.clear();
M5.Lcd.setCursor(140, 120);
M5.Lcd.printf("Exit");
delay(500);
return;
}
}
gyroOffsetZ = gyroSumZ / count - 0.02;
M5.Lcd.clear();
M5.Lcd.setCursor(140, 120);
M5.Lcd.printf("Done");
delay(500);
}
void GetGyro()
{
M5.IMU.getGyroData(&gyroX, &gyroY, &gyroZ);
M5.IMU.getAccelData(&accX, &accY, &accZ);
gyroZ -= gyroOffsetZ;
dt = (micros() - preTime) / 1000000;
preTime = micros();
yaw -= (pregz + gyroZ) * dt / 2;
pregz = gyroZ;
if(yaw > 180)
{
yaw -= 360;
}
else if(yaw < -180)
{
yaw += 360;
}
delay(10);
}
void Button()
{
M5.update();
if (M5.BtnA.wasPressed())
{
cnt--;
M5.Lcd.clear();
}
if (M5.BtnC.wasPressed())
{
cnt++;
M5.Lcd.clear();
}
}
void ResetGyro()
{
gyroZ = 0.0;
pregz = 0.0;
yaw = 0.0;
M5.Lcd.clear();
M5.Lcd.setCursor(120, 120);
M5.Lcd.printf("RESET");
delay(500);
M5.Lcd.clear();
}
void Main()
{
M5.Lcd.clear();
while (true)
{
M5.update();
M5.Lcd.fillCircle(160 + 80 * cos(degree), 120 + 80 * sin(degree), 10, BLACK);
M5.Lcd.setCursor(160, 0);
degree = (yaw - 90) / (180 / PI);
GetGyro();
M5.Lcd.drawCircle(160, 120, 80, WHITE);
M5.Lcd.fillCircle(160 + 80 * cos(degree), 120 + 80 * sin(degree), 10, GREEN);
M5.Lcd.printf("%4.0f", yaw);
if (M5.BtnB.wasPressed())
{
M5.Lcd.clear();
break;
}
}
}
void setup() {
M5.begin();
M5.Power.begin();
M5.IMU.Init();
M5.Lcd.fillScreen(BLACK);
M5.Lcd.setTextColor(WHITE , BLACK);
M5.Lcd.setTextSize(2);
delay(1);
}
void loop() {
Button();
switch (cnt)
{
case 0:
M5.Lcd.setCursor(140, 120);
M5.Lcd.printf("Main");
if (M5.BtnB.wasPressed())
{
Main();
}
break;
case 1:
M5.Lcd.setCursor(90, 120);
M5.Lcd.printf("Calibration");
if (M5.BtnB.wasPressed())
{
calibration();
}
break;
case 2:
M5.Lcd.setCursor(100, 120);
M5.Lcd.printf("ResetGyro");
if (M5.BtnB.wasPressed())
{
ResetGyro();
}
break;
default:
cnt = 0;
break;
}
}
プログラムが長くなってしまいました💦
時間があったので余計な物まで追加しちゃってます。キャリブレーションと初期方向のリセット、実際のyaw角の変化の可視化を同一プログラム内でできるようにしました。
キャリブレーションをする関数Calibration
Calibrationでは一番上でdefineした数CALIBCOUNT分だけデータを取りその値を平均した値をオフセット値に代入するという関数になっています。キャリブレーション中はIMUを動かさないというのが前提です。
yaw角の角度変化を求める関数GetGyro
GetGyroでは縦軸角速度(deg/s)、横軸時間(s)からなるグラフの面積を積算することで角度変化を求めるということをしています。(積分には台形による積算の方法を用いています。詳しくはこちらのサイトを参考にさせていただきました) 実際にyawに入る値は-180~180になるようにしています。
ジャイロの方向を初期化する関数ResetGyro
ResetGyroはyaw角を求めるために必要なパラメーターとyaw角自体を初期化するという簡単なものです。
最後に、求めたyaw角の角度変化を可視化する関数Main
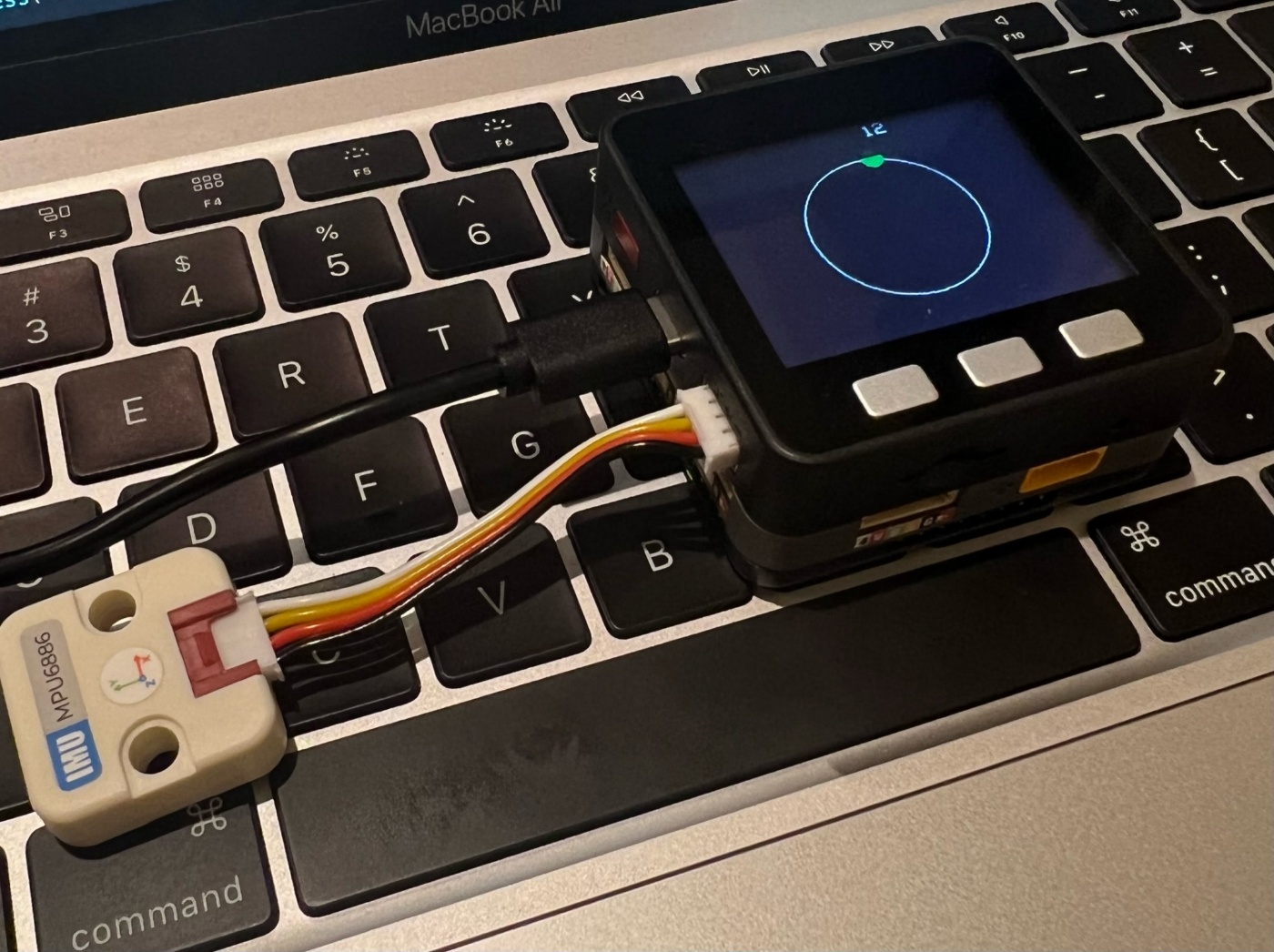
今回最終的にやりたかったことが角度変化を可視化することであったのでMainという名をつけました。
この関数では実際にGetGyroで求めた値を円上にプロットすることで可視化するというものです。円上の点の座標は半径をx、θをyaw角の角度変化とすると(xcosθ,xsinθ)となります。なので最終的に半径xの円を画面中央に描画し(円の中心x座標+(xcosθ),円の中心y座標+(xsinθ))に点を描画することで可視化できました。
しかし一度描画した点は自動的に消えてはくれないので、毎回次のループでその点を黒く塗るということをおこなっています。そのせいで表示と消すという動きを繰り返すため点が点滅してしまい少し見づらいです、、、何かいい方法はないのでしょうか、、
Discussion