Intro2DL : NNにおける損失関数
損失関数
ここでは、さまざまなタスクに使用される損失関数を見ていきます。
import os
import json
import math
import japanize_matplotlib
import numpy as np
import time
import copy
import requests
from io import StringIO
import pandas as pd
import matplotlib.pyplot as plt
from matplotlib import cm
import seaborn as sns
sns.set()
from tqdm import tqdm
from sklearn.metrics import mean_squared_error
import torch
import torch.nn as nn
import torch.optim as optim
import torch.nn.functional as F
import torch.utils.data as data
def set_seed(seed):
np.random.seed(seed)
torch.manual_seed(seed)
if torch.cuda.is_available():
# GPUありの場合
torch.cuda.manual_seed(seed)
torch.cuda.manual_seed_all(seed)
torch.backends.cudnn.deterministic = True
torch.backends.cudnn.benchmark = False
def get_device():
if torch.cuda.is_available():
device = torch.device("cuda:0")
elif torch.backends.mps.is_built():
device = torch.device("mps:0")
else:
device = torch.device("cpu")
return device
# pytorchでデータをダウンロードするときのパス(重複してDWしないため)
DATASET_PATH = "../data"
# モデルの保存先
CHECKPOINT_PATH = "../models/06_loss_fn"
os.makedirs(DATASET_PATH, exist_ok=True)
os.makedirs(CHECKPOINT_PATH, exist_ok=True)
# 再現性のためにseedを固定する
set_seed(42)
# device情報を取得する
device = get_device()
print(f"deviceは{device}です")
deviceはmps:0です
準備
0~9までの手書き数字画像のデータセットであるMNISTのデータをダウンロードします。
import torchvision
from torchvision.datasets import MNIST
from torchvision import transforms
# __getitem__()で取得する各画像に対して行う変換。ここではTensor化と正規化
transform = transforms.Compose([transforms.ToTensor(),
transforms.Normalize((0.13060), (0.30811),)])
# 訓練データのダウンロードとデータの分割
train_dataset = MNIST(root=DATASET_PATH, train=True, transform=transform, download=True)
train_set, val_set = torch.utils.data.random_split(train_dataset, [50000, 10000])
# テストデータのダウンロード
test_set = MNIST(root=DATASET_PATH, train=False, transform=transform, download=True)
# DataLoaderの定義
# 実際のより大きな画像/モデルの場合はbatch_sizeはメモリに制限があり、より少なく設定されると思われます
train_loader = data.DataLoader(train_set, batch_size=1024, shuffle=True, drop_last=False)
val_loader = data.DataLoader(val_set, batch_size=1024, shuffle=False, drop_last=False)
test_loader = data.DataLoader(test_set, batch_size=1024, shuffle=False, drop_last=False)
# もしNormalizeの平均と標準偏差を決め打ちで0.5としない場合は、以下のように元訓練画像群から計算した平均と標準偏差を指定します
print("Mean", (train_dataset.data.float() / 255.0).mean().item())
print("Std", (train_dataset.data.float() / 255.0).std().item())
Mean 0.13066047430038452
Std 0.30810782313346863
# 1batchに対して各統計量を計算して確認します
# 1batchなので厳密に平均0、標準偏差1になってはないですが確認できました。
imgs, _ = next(iter(train_loader))
print(f"Mean: {imgs.mean().item():5.3f}")
print(f"Standard deviation: {imgs.std().item():5.3f}")
print(f"Maximum: {imgs.max().item():5.3f}")
print(f"Minimum: {imgs.min().item():5.3f}")
Mean: -0.001
Standard deviation: 0.998
Maximum: 2.822
Minimum: -0.424
# ここでデータを可視化してみます
exmp_imgs = [train_set[i][0] for i in range(16)]
img_grid = torchvision.utils.make_grid(torch.stack(exmp_imgs, dim=0), nrow=4, normalize=True, pad_value=1)
img_grid = img_grid.permute(1, 2, 0)
plt.figure(figsize=(8,8))
plt.title("FashionMNIST examples")
plt.imshow(img_grid)
plt.axis('off')
plt.show()
plt.close()
また、回帰用にBostonDatasetをダウンロードします。
link = r"https://raw.githubusercontent.com/eric-bunch/boston_housing/master/boston.csv"
f = requests.get(link)
df = pd.read_csv(StringIO(f.text), sep=",")
df.to_csv(f"{DATASET_PATH}/boston.csv")
その他の関数群を定義
def _get_config_file(model_path, model_name):
return os.path.join(model_path, model_name + ".config")
def _get_model_file(model_path, model_name):
return os.path.join(model_path, model_name + ".tar")
def _get_result_file(model_path, model_name):
return os.path.join(model_path, model_name + "_results.json")
def load_model(model_path, model_name, net=None, base=None):
config_file, model_file = _get_config_file(model_path, model_name), _get_model_file(model_path, model_name)
assert os.path.isfile(config_file), f"Could not find the config file \"{config_file}\". Are you sure this is the correct path and you have your model config stored here?"
assert os.path.isfile(model_file), f"Could not find the model file \"{model_file}\". Are you sure this is the correct path and you have your model stored here?"
with open(config_file, "r") as f:
config_dict = json.load(f)
if net is None:
net = base(**config_dict)
net.load_state_dict(torch.load(model_file))
return net
def save_model(model, model_path, model_name):
config_dict = model.config
os.makedirs(model_path, exist_ok=True)
config_file, model_file = _get_config_file(model_path, model_name), _get_model_file(model_path, model_name)
with open(config_file, "w") as f:
json.dump(config_dict, f)
torch.save(model.state_dict(), model_file)
回帰
まずは回帰分析を行います。
dataloaderの準備
df_boston = pd.read_csv(f"{DATASET_PATH}/boston.csv", index_col=0)
# Xとyに分割
y_column = ["MDEV"]
X_columns = ['CRIM', 'ZN', 'INDUS', 'CHAS', 'NOX', 'RM', 'AGE', 'DIS', 'RAD', 'TAX',
'PTRATIO', 'B', 'LSTAT']
X = df_boston[X_columns]
y = df_boston[y_column]
# TensorDatasetの作成
X = torch.tensor(X.values, dtype=torch.float32)
y = torch.tensor(y.values, dtype=torch.float32)
dataset = data.TensorDataset(X, y)
# trainとval, testに分割
n_train = int(len(dataset) * 0.7)
n_val = int(len(dataset) * 0.2)
n_test = len(dataset) - n_train - n_val
train_set, val_set, test_set = data.random_split(dataset, [n_train, n_val, n_test])
# dataloaderの作成
train_loader = data.DataLoader(train_set, 64, shuffle=True, drop_last=False)
val_loader = data.DataLoader(val_set, n_val, shuffle=True, drop_last=False)
test_loader = data.DataLoader(test_set, n_test, shuffle=True, drop_last=False)
訓練するときの関数を定義
def train_model(net, model_name, loss_module, max_epochs=100, batch_size=64, patience=7):
# Defining optimizer, loss and data loader
optimizer = torch.optim.SGD(net.parameters(), lr=1e-2, momentum=0.9)
train_loader_local = data.DataLoader(train_set, batch_size=batch_size, shuffle=True, drop_last=True, pin_memory=True)
results = None
val_scores = []
train_losses = []
best_val_epoch = -1
for epoch in range(max_epochs):
############
# Training #
############
net.train()
epoch_loss = 0.0
t = tqdm(train_loader_local, leave=False)
for x, y in t:
x, y = x.to(device), y.to(device)
optimizer.zero_grad()
preds = net(x)
loss = loss_module(preds, y)
loss.backward()
optimizer.step()
epoch_loss += loss.item()
epoch_loss /= len(train_loader_local)
train_losses.append(epoch_loss)
##############
# Validation #
##############
val_score = test_model(net, val_loader)
val_scores.append(val_score)
#print(f"[Epoch {epoch+1:2d}] Training Score: {epoch_loss:05.5f}, Validation Score: {val_score:05.5f}")
if len(val_scores) == 1 or val_score < val_scores[best_val_epoch]:
best_val_epoch = epoch
elif best_val_epoch <= epoch - patience:
print(f"Early stopping due to no improvement over the last {patience} epochs")
break
test_score = test_model(net, test_loader)
results = {"test_score": test_score, "val_scores": val_scores, "train_losses": train_losses}
# Plot a curve of the validation accuracy
sns.set()
plt.plot([i for i in range(1,len(results["train_losses"])+1)], results["train_losses"], label="Train")
plt.plot([i for i in range(1,len(results["val_scores"])+1)], results["val_scores"], label="Val")
plt.xlabel("Epochs")
plt.ylabel("Validation Score")
plt.ylim(0, 1000)
#plt.ylim(min(results["val_scores"]), max(results["train_losses"])*1.01)
plt.title(f"Validation performance of {model_name}")
plt.legend()
plt.show()
plt.close()
return results
def test_model(net, data_loader):
"""
Test a model on a specified dataset.
Inputs:
net - Trained model of type BaseNetwork
data_loader - DataLoader object of the dataset to test on (validation or test)
"""
net.eval()
test_score = 0.0
for x, y in data_loader:
x, y = x.to(device), y.to(device)
with torch.no_grad():
preds = net(x)
mse = mean_squared_error(y.cpu().numpy(), preds.cpu().numpy())
test_score += mse
test_score /= len(data_loader)
return test_score
ネットワークの定義
Bostonデータセットでは各特徴量ごとに単位が異なるので、入力層の後にBatchNormalizationを入れてスケールを統一しています。(普通に訓練データ全体で正規化したものを入力した方がいいかもしれませんが、今回は無理矢理内容に入れたかったので。。)
BatchNormalizationは名前の通り、ミニバッチ内の全サンプルに対して特徴量ごとに正規化(平均が0, 分散が1になるように変換)する層になります。ただ、普通の正規化ではなく以下のようにmomentumを持っています。バッチ正規化は多層NNを安定させたり有効な層ですが、なぜうまくいくのかははっきり分かっていないそうです。また、学習時と推論時で平均と分散に大きな差がある場合は悪影響を与える可能性があります。
また、正則化の1種であるDropoutも入れてあります。Dropoutはネットワーク内のユニットを学習時のみランダムに削除する方法です。学習時はミニバッチ単位で確率pでランダムに選出したユニットを無効化します。推論時は学習時に比べユニット数が
最後に、今回は出力層に恒等関数(何も設定してない)を考えましたが、yの値域が[-1:1]の場合は双曲線正接関数を選ぶなど目的とする出力域が得られるように設計します。
dropoutの実装
普通にnn.Dropout()を使用してもいいのですが、訓練時と推論時で挙動が異なるモジュールをどう書くのか調べるがてら実装してみました。
訓練/推論時の情報はself.trainingに入っているのでIF文で実装できます。
中身は異なりますが、https://www.kaggle.com/code/cepheidq/gaussian-dropout-for-pytorch/notebook を参考に実装しました。
class Dropout(nn.Module):
def __init__(self, p: float=0.5):
""" 初期化
Args:
p (float): ユニットを無効化(0)する確率. Defaults to 0.5.
"""
super().__init__()
self.p = p
def forward(self, t_input):
""" dropout
訓練時はベルヌーイ分布からサンプリングした確率で無効化、推論時はそのままt_inputを返す
"""
if self.training and self.p > 0:
# 1-pの確率で1、pの確率で0をベルヌーイ分布からサンプリング
t_p = torch.ones_like(input=t_input, dtype=t_input.dtype, device=t_input.device).fill_(1. - self.p)
t_noise = torch.bernoulli(t_p)
t_input = t_input.mul(t_noise)
return t_input
ちゃんと実装できているか確認してみます。確率的に値が0になっていることがわかりますね。
dropout = Dropout()
t_input = torch.randn((4, 4))
print(t_input)
t_drop = dropout.forward(t_input)
print(t_drop)
tensor([[-0.6700, 0.7942, 0.2004, 0.4637],
[ 0.4883, 0.1079, -1.4685, -0.4811],
[ 2.1797, 0.9339, 1.1797, 0.3841],
[ 0.7626, -1.5459, 0.6582, -0.2806]])
tensor([[-0.6700, 0.0000, 0.2004, 0.0000],
[ 0.4883, 0.1079, -1.4685, -0.0000],
[ 2.1797, 0.9339, 1.1797, 0.0000],
[ 0.7626, -0.0000, 0.0000, -0.0000]])
class RegressionNet(nn.Module):
def __init__(self, act_fn=nn.ReLU, input_size=784, output_size=1, hidden_sizes=[512, 256, 256, 128]):
"""
Inputs:
act_fn - 今回試したい活性化関数
input_size - 画像のサイズ
num_classes - 予測したいクラス数
hidden_sizes - 隠れ層のサイズのリスト
"""
super().__init__()
layers = []
layer_sizes = [input_size] + hidden_sizes
layers.append(nn.BatchNorm1d(input_size))
for layer_index in range(1, len(layer_sizes)):
layers += [nn.Linear(layer_sizes[layer_index-1], layer_sizes[layer_index]),
#nn.BatchNorm1d(layer_sizes[layer_index]),
act_fn(),
Dropout(p=0.25)]
layers += [nn.Linear(layer_sizes[-1], output_size)]
# リスト情報からlayerを追加
self.layers = nn.Sequential(*layers)
# モデルを保存/読み込む際に必要な情報を格納
self.config = {"input_size": input_size, "output_size": output_size, "hidden_sizes": hidden_sizes}
def forward(self, x):
out = self.layers(x)
return out
model = RegressionNet(input_size=len(X_columns), hidden_sizes=[5, 5])
model.to(device)
RegressionNet(
(layers): Sequential(
(0): BatchNorm1d(13, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(1): Linear(in_features=13, out_features=5, bias=True)
(2): ReLU()
(3): Dropout()
(4): Linear(in_features=5, out_features=5, bias=True)
(5): ReLU()
(6): Dropout()
(7): Linear(in_features=5, out_features=1, bias=True)
)
)
以下の結果を見ると、訓練とバリデーションのロスを比較すると、バリデーションの方が良くなってしまっていることが確認できます。
たまにおきますが、以下のような理由が考えられます。今回の理由としては2か3ですかね?3はランダムに分割はしていますが、検証用データのデータ数がそこまで多くないのと、2は複雑なタスクではないので、学習中にモデルの性能が変わっている可能性があります。また、バグやリークの可能性もありますが、テストデータのMSEも72とほとんど同じなのでその可能性は低そうです。
- dropoutなど訓練時のみ適用されているものがある
- Training Lossは1エポックをかけて計算され、Validation Lossは1エポック終了時に計算される
- バリデーションデータに、訓練データより簡単なデータが集まっている
results = train_model(model, "test", loss_module=nn.MSELoss(), batch_size=20, max_epochs=100)
print(results["test_score"])
Early stopping due to no improvement over the last 7 epochs
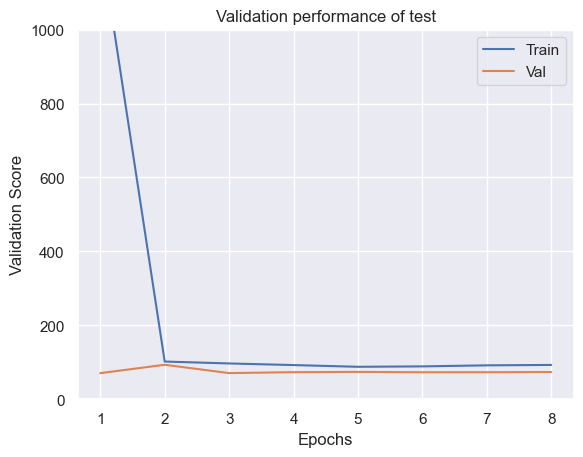
72.55404663085938
2値分類
次は入力Xを2値に分類する問題を考えます。ここでは、事後確率
事後分布はk=1との時とk=0の時しかないので、以下のように表すことができます。
次に、最尤推定によりNNのパラメータ
これに対して、尤度の対数をとり、符号を反転させた以下を損失関数とし、最小化していきます。
また、出力層に活性化関数としてシグモイド(ロジスティック)関数を持つユニットを1つだけ持つNNを考えると、事後確率
上記の損失関数は、pytorchでは、Binary Cross Entropy(BCE) Lossとして実装されています。BCE lossはnn.BCELoss()とnn.BCEWithLogitsLoss()の2種類あります。nn.BCEWithLogitsLoss()はSigmoidの層とBCE lossが1つのクラスになったもので、1つに結合することでlog-sum-exp trickにより数値的に安定します。そのため、今回はモデルの定義のところではSigmoidの層を抜きにして、ロスに``nn.BCEWithLogitsLoss()`を使用します。
また、上記の損失関数を使わなくても下記の多クラス分類のクラス数2の場合で定式化することも可能です。
# こちらは最初のXORの例題で実施したのでコードはパスします。
多クラス分類
次に入力
このような場合、ネットワークの出力層には分類したいクラス数Kと同じ数のユニットを並べ、この層の活性化関数としてソフトマックス関数を選びます。この時、出力層
ここで、入力
ここで、訓練データとしては、入力
このようにとると、事後分布は2値分類の時と同様に以下のように表されます。
以上より、訓練データに対する
この尤度の対数をとり、符号を反転させてものを損失関数とし、最小化していきます。この関数は、交差エントロピーと呼ばれます。
ここで、
pytorchでは、nn.CrossEntropyLossまたは、nn.LogSoftmaxとnn.NLLLossの組み合わせで実装できます。2値分類の時も同じですが、活性化関数と組み合わせたnn.CrossEntropyLossを使用する場合は推論時に別途Softmax関数が必要になります。
# 前回までにFashionMNISTで実装したのでコードはパスします
以上で損失関数は終わりです。
ここまでで深層学習第2版の1-4章はカバーできたのではないでしょうか。次は画像系を見ていきたいと思います。
Discussion