Open4
vSLAMのまとめ
用語説明
vSLAM
Visual Simultaneous Localization and Mappingの略。
SLAMという自己位置推定と地図構築を同時に行うタスクでカメラを用いるもの。
SfMと似ているが、vSLAMは入力される画像が時系列順で、オンライン処理を行うのがポイント。
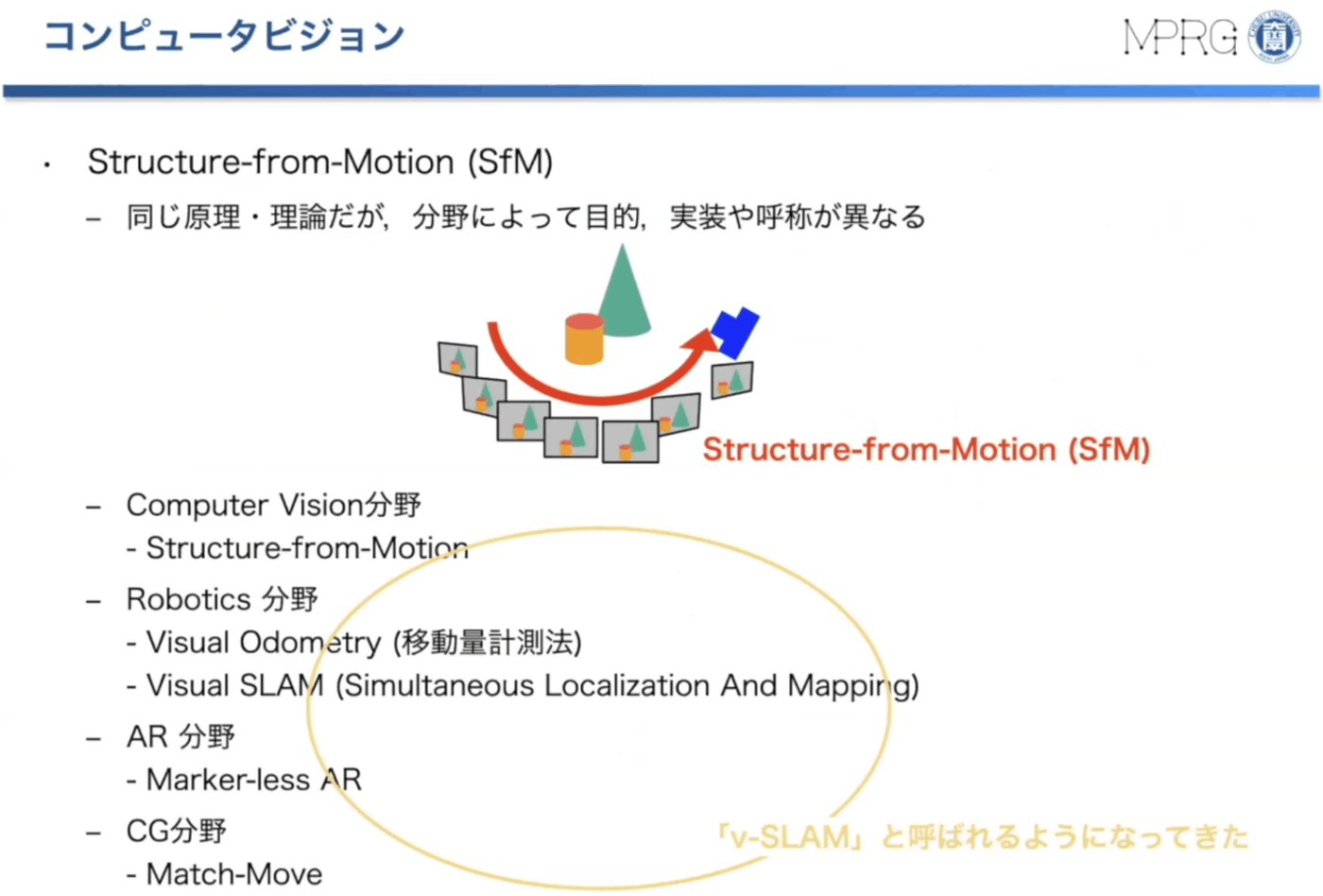
SfM
Structure from Motionの略。
いくつかの視点から撮影した画像を元に対象物の幾何学形状とカメラの動きを同時に復元する手法。
vSLAMと違いオフライン処理を行う。
MVS
Multi-View Stereoの略。
SfMによって求めたカメラの姿勢や対象物の幾何学形状を用いて更に高精度な対象物の幾何学形状を求める手法。
こちらもSfMと同様にオフライン処理で行う。
VO
Visual Odometryの略。
カメラを用いてロボットが自己位置推定を行う手法。
vSLAMと違い、地図構築は行わない。
このように少しずつ意味合いが違う用語が多いが、近年はまとめてvSLAMと呼ばれているらしい。
https://fujiyoshiai.robotvisionchat.com より
SfMの中にvSLAMがあり、その中にVOがあるらしい。

http://mrsl.grasp.upenn.edu/loiannog/tutorial_ICRA2016/VO_Tutorial.pdf より
vSLAM
参考文献
MVS
参考文献
SfM
実装系
COLMAP
OpenMVG
AliceVision