🏔️
Pixhawk 2.4.8 ArdupilotでPreArm: Baro: GPS alt errorが発生した際の解決策

発生条件
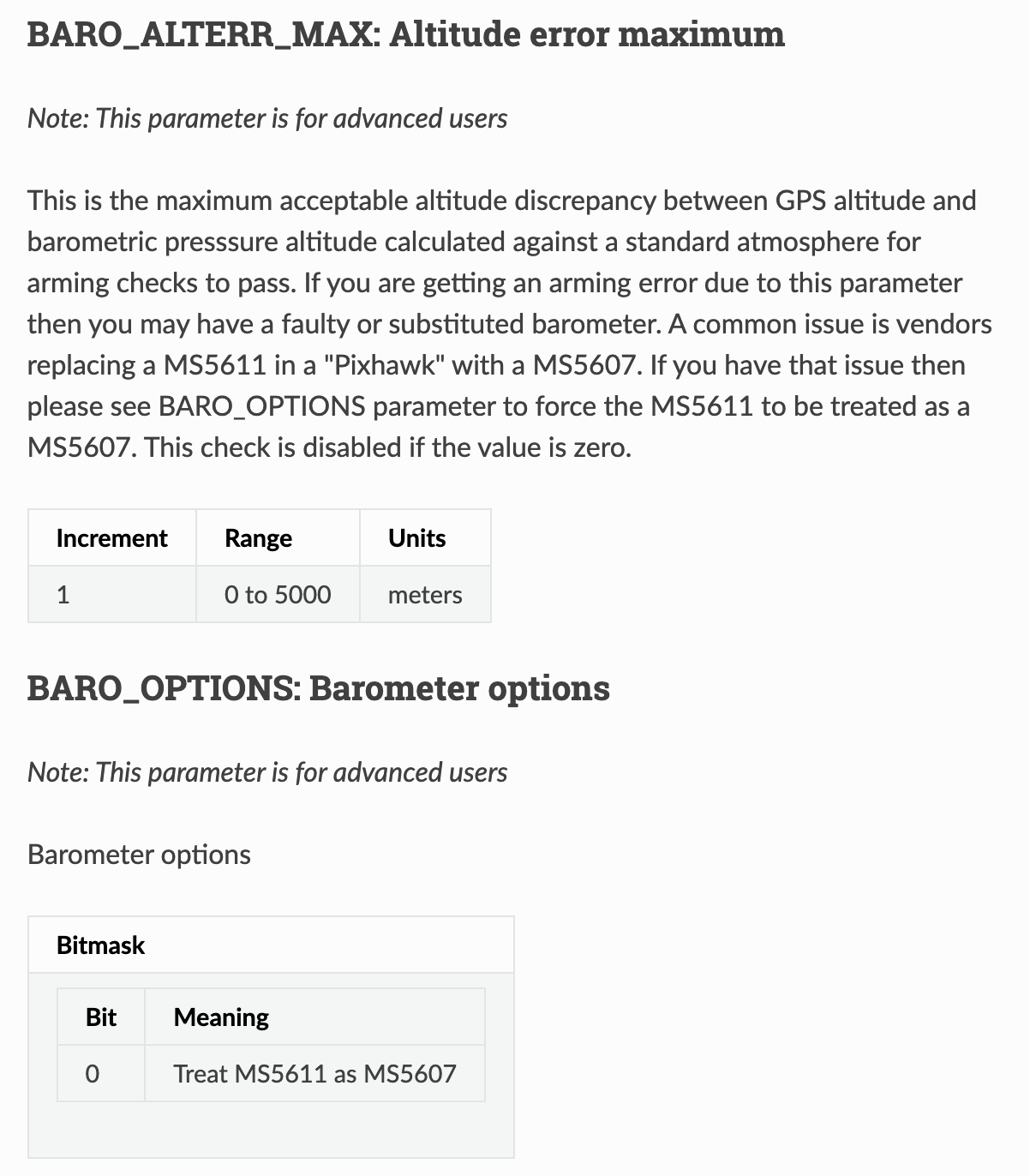
標準大気に対して計算されたGPS高度と気圧高度の間の最大許容高度差(BARO_ALTERR_MAX)がデフォルトの5000mを超えると発生する。
原因
よくある問題として、ベンダー(販売業者)が「Pixhawk 2.4.8」の気圧センサーをArdupilotがデフォルトにしているMS5607ではなく、MS5611に置き換えていることが原因であると考えられます。
MS5611とMS5607はどちらも気圧センサーですが、技術的な特性や校正方法が異なるため、ファームウェアがそれぞれに対して異なる補正や処理を行う必要があるらしい。
解決方法
Mission Plannerの「設定/調整」>「フルパラメーターリスト」にある、BARO_OPTIONSというパラメーターがあると思います。こちらを、デフォルト値である0から1に修正してください。
BARO_OPTIONSが0の場合、MS5611として扱われてしまうため、Ardupilotは正しい校正を行えないためGPSの高度と大きな誤差が起きてしまう。
BARO_OPTIONSを1に変更した場合、MS5611がMS5607として扱われるようになる。よって、正しい校正が行えGPSとの高度差が改善される。
公式ドキュメントや公式フォーラムでも同様の解決策が上がっていたが具体的に何が起こっているのかがすぐ見つけられなかったのでここに残しておきます。
Discussion