ROS2プログラミング入門 #6 亀を制御する
この記事では、ROS2プログラミングで亀を制御するノードを作ってみます。
はじめに
ROSを学び始めた人が最初に動かすデモパッケージの1つに turtlesim があります。
ros-foxy-desktop をインストールした時に turtlesim も自動でインストールされているはずなので、ターミナルで次のコマンドを実行すると
ros2 run turtlesim turtlesim_node
次のような感じで「亀」が画面に表示されると思います。

turtlesim_nodeを実行した様子
今回は、この亀 turtlesim_node を自動で動かすノードを作ってみようと思います。
全体像
今のところ、作ろうとしているものの全体像は下図のようになります。
turtle_controller ノードから何かのトピックを介して turtlesim_node ノードへメッセージを送り、そのメッセージによって亀が動く、ということですね。
ノードとトピックを調べる
今回のように動かしたいノードが既にある場合、そのノードを起動してからトピックを調べると分かりやすいと思います。
はじめに、何もノードを起動していない状態で次のコマンドを実行してみましょう。
ros2 node list
ros2 topic list
ノードはなくても /parameter_events と /rosout というトピックはあることが確認できます。
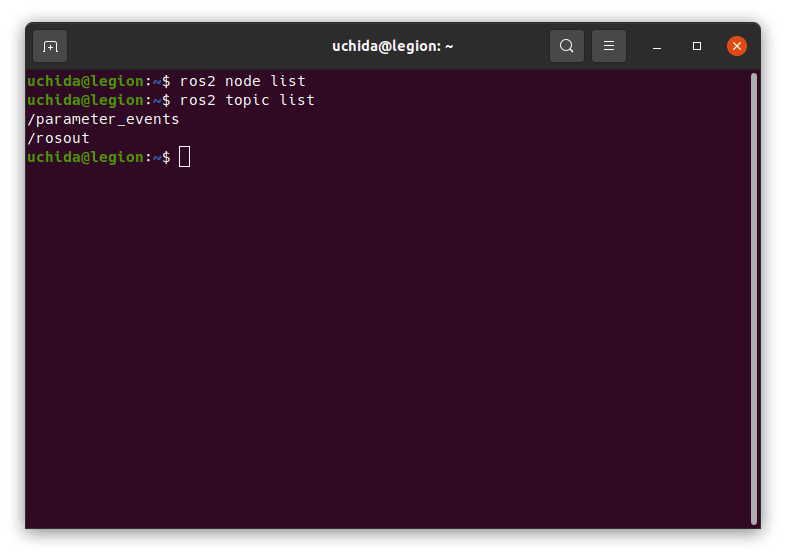
ノードはなくてもトピックはある
続いて、別ターミナルで ros2 run turtlesim turtlesim_node を実行し、もう一度ノードとトピックの状態を調べましょう。そうすると、次のようにノードとトピックの情報が変化します。
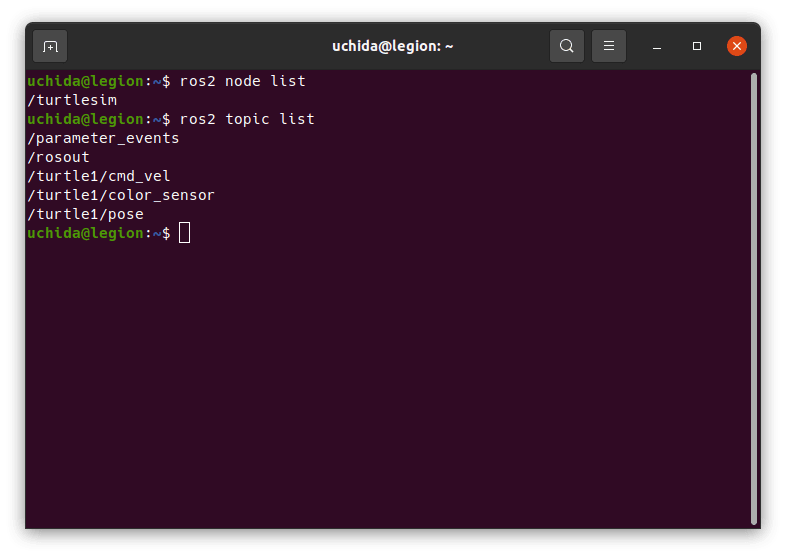
turtlesim_nodeの実行でノードとトピックが増えた
ここからまず分かることは、当たり前ですが /turtlesim というノードがあることです。
それから /turtle1/cmd_vel /turtle1/color_sensor /turtle1/pose というトピックが増えたことも見て取れます。さらにコマンドを実行してノードを詳しく調べます。
ros2 node info /turtlesim
次のように表示されると思います。
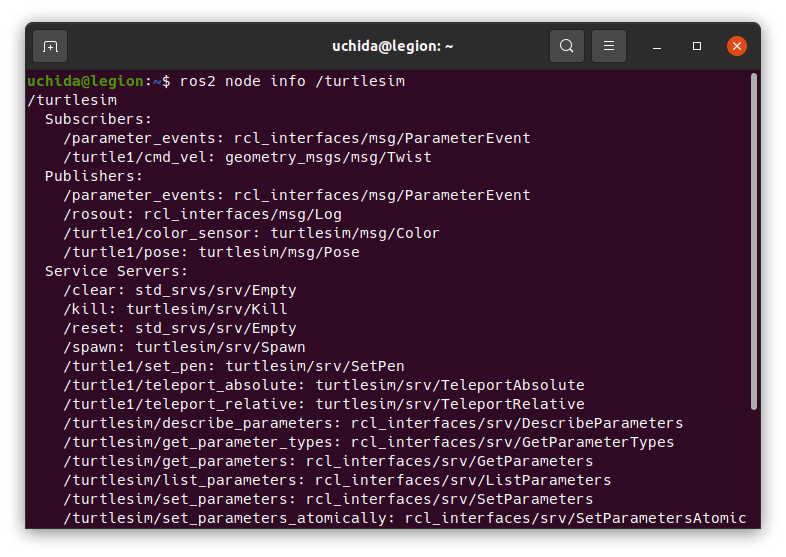
/turtlesim ノードの情報
これで /turtle1/cmd_vel はサブスクライブ、また /turtle1/color_sensor と /turtle1/pose はパブリッシュしているトピックということが分かりました。
図示すると次のような感じでしょうか。
つまり /turtle1/cmd_vel トピックにメッセージをパブリッシュすると /turtlesim ノードがサブスクライブしてくれる、ということですね。
それでは /turtle1/cmd_vel トピックを詳しく調べてみましょう。
ros2 topic info /turtle1/cmd_vel
次のように表示されると思います。

/turtle1/cmd_vel トピックの情報
結論として /turtle1/cmd_vel トピックへ geometry_msgs/msg/Twist 型のメッセージをパブリッシュすれば /turtlesim がサブスクライブして動いてくれそうな気がしてきました。
試してみましょう。
ノードを作る
これまで同様 my_first_package でソースファイルを作り、ビルド設定ファイルを編集します。
ソースファイル
my_turtle_controller.cpp という名前で、中身は次のように書いてみました。
#include "rclcpp/rclcpp.hpp"
#include "geometry_msgs/msg/twist.hpp"
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
auto node = rclcpp::Node::make_shared("turtle_controller");
auto publisher = node->create_publisher<geometry_msgs::msg::Twist>("/turtle1/cmd_vel", 1);
rclcpp::WallRate loop(1);
while (rclcpp::ok()) {
auto msg = geometry_msgs::msg::Twist();
msg.linear.x = 1.0;
msg.angular.z = 1.0;
publisher->publish(msg);
loop.sleep();
}
rclcpp::shutdown();
return 0;
}
前回作ったパブリッシャーとかなり似ていて、違うのはノード名、トピック名、メッセージの型、メッセージのデータの作り方ぐらいです。
Twist 型に含まれる liner はXYZ軸における並進速度、もう一方の angular はXYZ軸周りの回転速度と思われます。
今回は円を描くように動かしたかったので linear.x と angular.z に値を設定してみました。
ビルド設定ファイル
変更内容としては、メッセージの型を使えるようにする以下の行と
+ find_package(geometry_msgs REQUIRED)
実行ファイルをビルドするための以下の行を追加しました。
+ add_executable(my_turtle_controller src/my_turtle_controller.cpp)
+ ament_target_dependencies(my_turtle_controller rclcpp geometry_msgs)
+ install(TARGETS my_turtle_controller DESTINATION lib/${PROJECT_NAME})
動作確認
(cd ~/dev_ws/ && colcon build) でビルドして、次のようにコマンドを実行します。
ros2 run my_first_package my_turtle_controller
亀がぐるぐる円を描くように動くはずです。

my_turtle_controllerを実行した様子
おわりに
今回は、ROS2プログラミングで亀を制御するノードを作ってみました。どなたかのお役に立てば幸いです。
Discussion