
1. はじめに
こんにちは。TURING株式会社(以下、TURING)で、インターンをしている東大B3の中村です。
TURINGは、完全自動運転EVを作るべく設立されたベンチャー企業です。自動運転システムとそれを搭載したEV車の開発を行っています。
TURINGでは、2022/09/27から同10/5(実走行は9/29から10/3)にかけて、hokkaidoプロジェクトと題して、自動運転システムを用いて北海道を沿岸部にかけてほぼ一周するプロジェクトを実施しました。結果として、総走行距離1480kmに対して約1400km(95%)を自動運転で走行しました。
今回、自動運転車両の走行をするために事前に北海道道庁・国土交通省に相談・許可をいただき、弁護士さんにお墨付きをもらった上で通過する各自治体に周知を行って実行しています。関係各所、弊社チームのみなさんにはこの場を借りて感謝お伝えします。

図1 北海道のルート(実際のルートとは一部異なります)
(北海道では、試験走行車の運転手の集中力の限界を考慮して、先導車を常につけていましたが、基本的には先導車なしでも走行できます。)
この記事では、hokkaidoプロジェクトで長距離走行を可能にしたTURINGのソフトハードを融合した自動運転システムと良かった点と現状の課題について紹介していきます。
2. hokkaidoにおける自動運転システムとハードウェアの構成
TURINGの公道試験は9月から会社所在地の柏の葉で開始しています。
ここでは、現時点での自動運転システムの構成と、hokkaidoプロジェクトのような300km/日の走行を可能にしたハードウェア的な構成について紹介します。
自動運転システムについて
TURINGの自動運転システムは画像を入力として受け取り、経路を推定します。基本的にはカメラからの画像が全てであり、前方車との車間も、画像を入力としたモデルの出力と制御で調整します。
カメラからの入力を軸にしている以上、その画質、フレームレート、画角には気を配らななければなりません。画質やフレームレートは良いハードを使えば消費電力や費用の問題などを置いておいて、なんとかなります。しかし、アングルについては
- 車種
- 取付時の誤差
- センサーやレンズ
によって大きく変わり得ます。取付時の誤差程度であれば、内部でキャリブレーション出来ますが、車種による違いや、レンズが変わった場合の画角の違いについてはキャリブレーションの限度を超えてしまいます。
もちろん、ある程度の誤差について耐えるようにモデルは出来ていますし、そうでなければなりませんが、人でも急に車高の違う車に乗ったときに戸惑うように、推論もそのモデルが学習されたときのカメラ、車種に過学習されてしまうことがあるため、修正が可能な範囲で修正が必要です。
TURINGでは、モデルの入力として最適な画像と、実際の画像の間で、特徴量検出を機械学習で行い、最適なパラメータを算出した後、射影変換を行ってモデルに入力を受け渡すということを行っています。(図2)
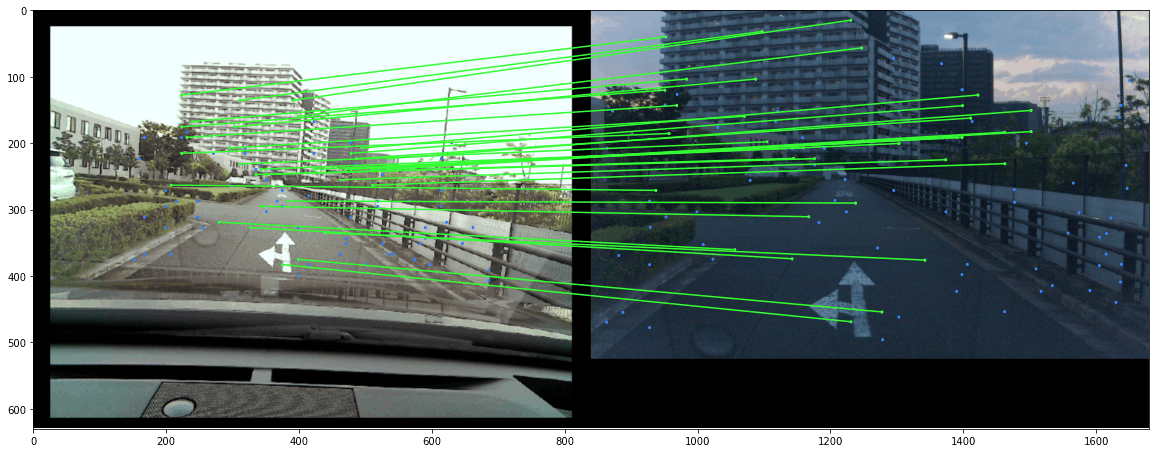
図2 画像の特徴量検出
ハードウェアの構成
TURINGの自動運転システムのハードウェアにおける特徴は追加で用意するハードウェアは基本的に計算機とカメラと小さなマイコンデバイスだけという点です。他に多く見られるようなLiDARなどの高価な機器を使用せず、人間と同様に目から入ってくる外の情報と速度計などの情報を元に、車を制御します。過去にも、カメラだけでの私有地内の走行を行っています。
この構成はhokkaidoにおいても同様であり、市販車にカメラを搭載した上で、ノートパソコンとCAN信号(車のあらゆるデータが流れるネットワーク)を送受信するデバイスを用意するだけで、システムが動作します。(図3)
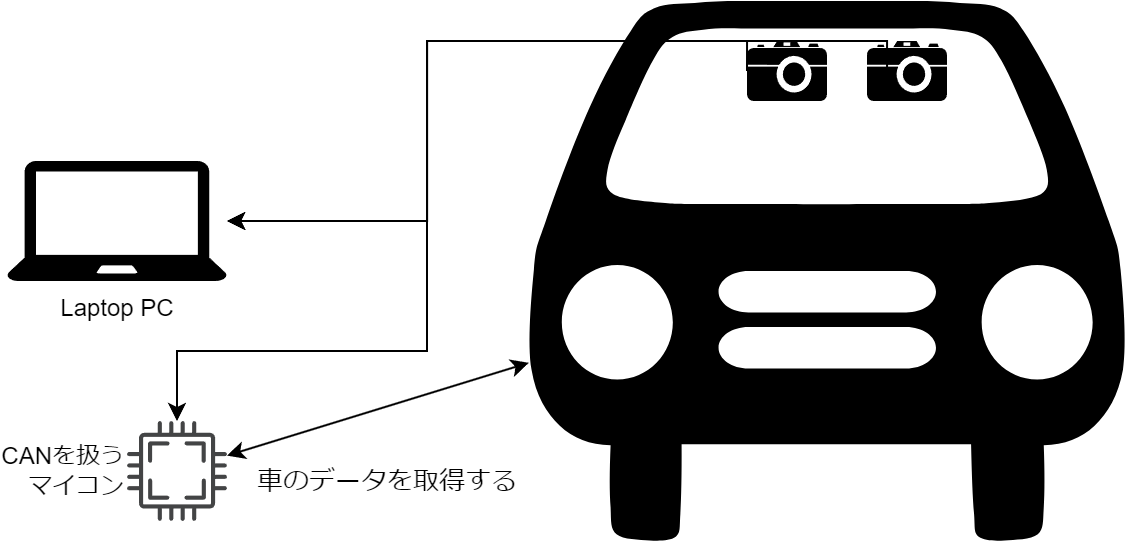
図3 ハードウェアの構成図
これまでの公道走行でもこの構成は使用してきましたが、毎日300km近く、6-8時間走行する場合には電源の供給が必要です。車にもACアダプターがありますが、バッテリーのことを考慮するとあまり好ましくありません。
車載のバッテリーともう一つ、サブバッテリを置き、車の内装を剥がして内部に配線を通して助手席までいくことで電源問題を解決しました。サブバッテリは車の電源系統と安全な形で接続されており、車からの充電・PCへの給電はスイッチで操作できるため、バッテリーが上がってしまうこともなく、安全な電源供給システムが出来ました。(図4)
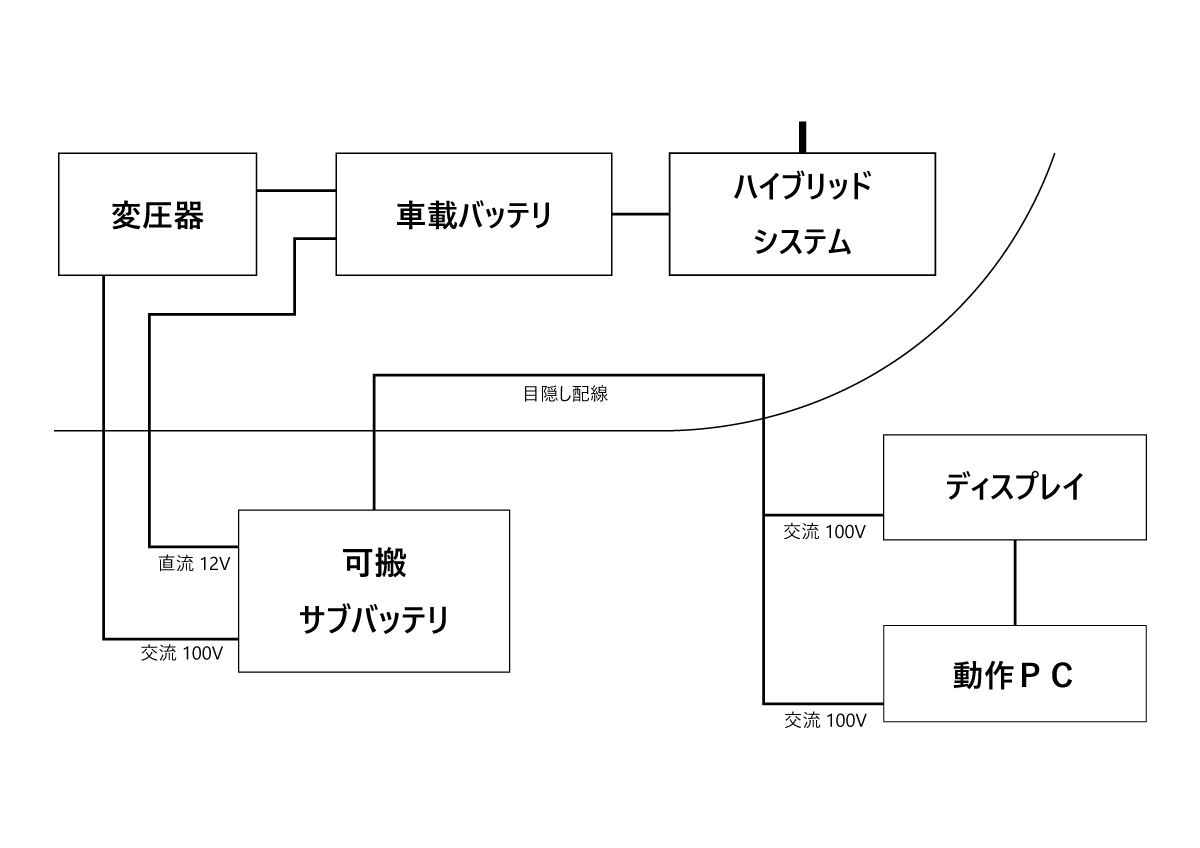
図4 電源周りの構成図
TURINGでは大手車両メーカーからのメンバージョインや、インターン生の車両ハックの訓練もあり、ある程度車を自由にいじれるようになってきています。(忘れられがちですが、TURINGは完全自動運転システムを搭載した"EV"の販売を目標とする会社です)
■過去にレクサスをハックしてブレーキランプでLチカをした動画
3. hokkaidoプロジェクトを通じて得られたものと今後
hokkaidoプロジェクトの成果として得られたものは多く、すぐに思いつくだけでも
- 長時間の走行試験を安定して行うためのノウハウ
- 長時間走行におけるソフトウェアとその周りのハードの耐久性確認
- 既存のAI・制御システムの強みと弱みの再認知
- 組み込み環境において省電力が重要であることの全社的な再認知
などがあります。
個人の感想になりますが、インターンとして北海道一周にかかわらせていただけたことはとても貴重な体験でした。自分の携わっているものが実際の現場で動いているのはモチベーションに繋がりますし、実際に乗ってみてわかることも沢山あります。手を動かし、それを反映させることの重要性を再認知できました。
北海道での技術的な多くの視点を取り入れ、現在社内では、同時並行で
- より強化したモデルを作成するための基盤づくりと、データ収集
- エンジニアでない人が乗っても耐えうる、省電力で安定的に稼働可能なシステムの最適化
- UX向上
- 車両制作のための取り組み
に取り組んでおり、かつてないテンポで開発が進んでいます。
4. おわりに
完全自動運転車のためには、機械、ロボット、AIなど多くの分野のエンジニアが必要です。TURINGは自動運転の実現とそれによる社会の未来を信じています。システム開発だけでなく車両開発も進めており、低レイヤーやハード領域の開発も急ピッチで進んでいます。「現代最高のエンジニアリング課題の一つ完全自動運転を一緒に解きたい」「車をゼロから作り、公道を走る感動をチームで味わいたい」そんな方はぜひご応募ください。
問い合わせ先:
弊社求人一覧およびWantedlyをご覧ください。
その他ご質問や気になる点がありましたら、お気軽にTwitterのDMをお送りください。共同代表山本・青木どちらもDMを開放しております。
→ @issei_y, @aoshun7
また、HPからカジュアル面談やスカウトを待つことも出来ます。お気軽にご応募ください!

Discussion