Open2
Python controlで試す制御(主に状態制御)
0次ホールドと双一次変換の比較
【目的】
離散時間の制御器設計として,(1)連続時間の制御器を離散時間に変換する,(2)離散時間にした制御対象を用いて制御器を設計する,のアプローチがある.
(1)の変換としていくつかある中の 0次ホールド,双一次変換したブロックの応答を連続時間と比較,Python controlでの実現
【ref】制御系設計論 14章
1次遅れな制御器を考える.
状態方程式だと
つまり
0次ホールドで離散時間(サンプリング
双一次変換だと
Python controlの場合
from control.matlab import *
import numpy as np
import matplotlib.pyplot as plt
# 0次ホールド
ad = np.exp(-dt)
bd = 1-np.exp(-dt)
cd = 1
dd = 0
dt = 1
sys0 = ss(ad,bd,cd,dd,dt)
# 双一次
ad = 1/3
bd = 1/3
cd = 4/3
dd = 1/3
dt = 1
sys1 = ss(ad,bd,cd,dd,dt)
# プロット
n = 10
t = np.arange(n)*dt
x0 = 0
y1,t = step(sys1,t,x0)
y0,t = step(sys0,t,x0)
# 連続時間
sysid = tf([1],[1,1])
tid = np.arange(100)*0.1
yid,tid = step(sysid,tid,x0)
## whereを入れないと後の値を前に引き伸ばすのでホールドっぽくならない
plt.step(t,y0,where='post',label="zero-hold")
plt.step(t,y1,where='post',label="bilinear")
plt.plot(tid,yid,label="continuous")
plt.legend()
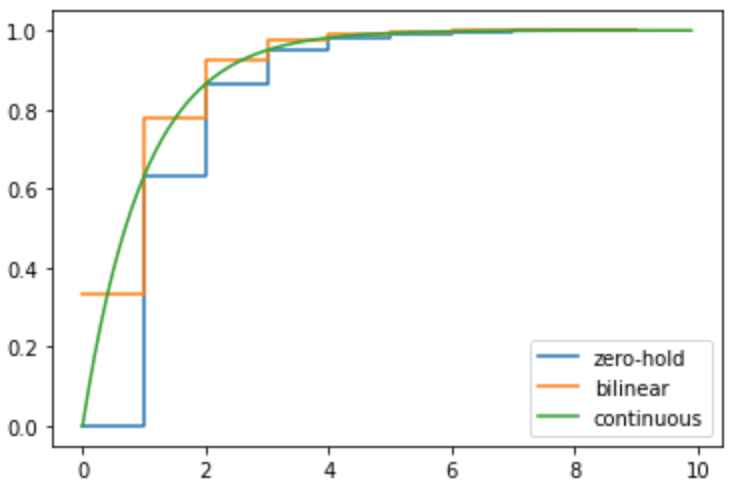
0次ホールドは連続時間の応答のサンプリングタイミングの値をホールドする(定義のまま)
双一次は平均的に近い値になる.遅れない = 位相の周波数特性が連続時間に近くなるのに対応しているっぽい.
連続時間のsysをc2dで離散化してももちろん同じ結果になる.
離散時間のフィードバック制御器により安定化
【目的】
極配置で設計したフィードバック制御器でどのように安定化されるかのチェック
【ref】制御系設計論 14章 演習14-7
安定性は
# もとの制御対象
ad = np.array([[0.5,1],[0,1]])
bd = np.array([[0],[1]])
cd = np.array([[1,0],[0,1]])
dd = np.array([[0],[0]])
dt = 0.1
sysdef = ss(ad, np.zeros([2,1]), cd, dd, dt) # uに入力したいわけではないため zeros
n = 50
t = np.arange(n)*dt
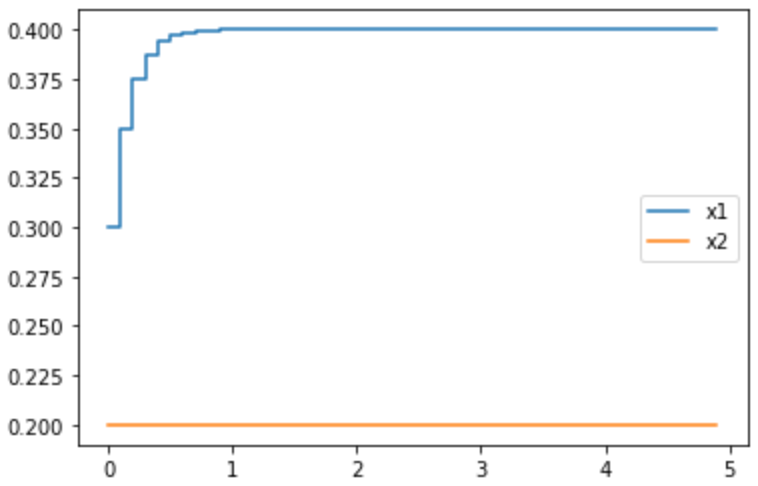
x0 = [0.3,0.2]
y0,t = step(sysdef,t,x0)
plt.step(t,y0[:,0,0],where='post',label="x1")
plt.step(t,y0[:,1,0],where='post',label="x2")
plt.legend()
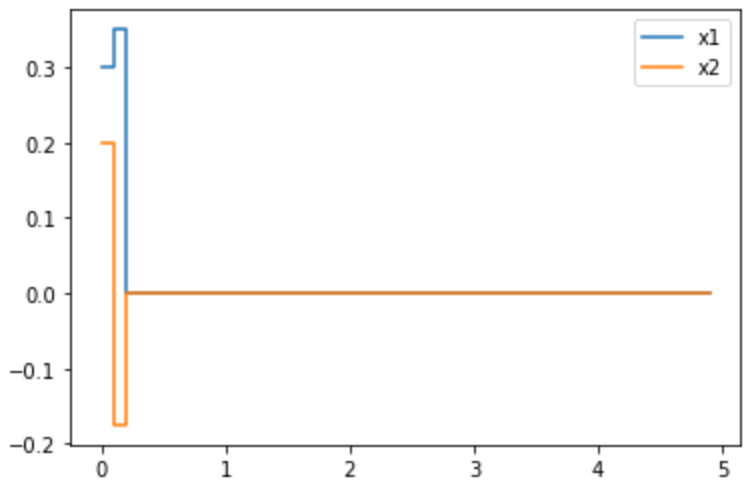
極配置を
f = np.array([[-1/4, -3/2]])
sysfb = ss(ad+bd@f, np.zeros([2,1]), cd, dd, dt)
y1,t = step(sysfb,t,x0)
plt.step(t,y1[:,0,0],where='post',label="x1")
plt.step(t,y1[:,1,0],where='post',label="x2")
plt.legend()