Open2
RPLIDER A1M8をROS Humbleで動かす
rplidar A1M8をRos2 humbleで動かす
公式のレポジトリはHumbleではビルドできないため、
以下のレポジトリをクローンする。
git clone -b ros2 https://github.com/lopenguin/rplidar_ros2.git
もし以前に公式のレポジトリのビルドで失敗した場合、ビルドが失敗するため、キャッシュを消す。
colcon build --cmake-clean-cache
RPLIDARを接続し、ノードとrviz2起動
$ ros2 run rplidar_ros2 rplidar_scan_publisher
$ rviz2
右上のFixed Frameを「laser_frame」に変更
rviz2画面の左下の「add」から「By topic」タブの「/scan LaserScan」を追加
追加したLaserScanのTopicのReliability Policyを「Best Effort」に変更
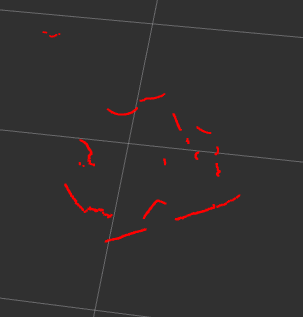
すると、以下のように点群が表示される