はじめに
PRML(Pattern Recognition and Machine Learning) でハードマージンのサポートベクターマシンについて学んだ内容をまとめて、pythonで実装しました。主に7章1節の内容です。より一般的なソフトマージンのモデルについては扱っていません。そのほか参考になるものは記事の一番下にのせてあります。
理論
問題設定
N個の既知のデータの組((\mathbf{x}_1, t_1), ... (\mathbf{x}_N, t_N)), t_i \in \{-1, 1\} \mathbf{x}_{N+1} t_{N+1}
サポートベクターマシンの目標
\mathbf{\phi}(\mathbf{x}) = (\phi_1(\mathbf{x}), \phi_2(\mathbf{x}), ... , \phi_M(\mathbf{x}))^T
\begin{aligned}
y(\mathbf{x}) = \mathbf{w}^T\mathbf{\phi}(\mathbf{x}) + b
\end{aligned}
今、訓練データが特徴量空間において線形分離可能だと仮定します。このとき、定義より少なくとも一つの\:t_ny(\mathbf{x}_n) \gt 0 \quad n = 1, ... , N\: \mathbf{w}, b \mathbf{w}, b
サポートベクターマシンのアプローチは、y=0 \mathbf{w}, b
制約付き最適化問題に落とし込む
データ点と超平面の距離は以下のようになるので、
\begin{aligned}
\frac{|\mathbf{w}^T\mathbf{x} + b|}{||\mathbf{w}||} = \frac{t_n(\mathbf{w}^T\mathbf{\phi}(\mathbf{x}_n) + b)}{||\mathbf{w}||}
\end{aligned}
マージンが最大となる\mathbf{w}, b
\begin{aligned}
\underset{\mathbf{w}, b}{max}\{\frac{1}{||\mathbf{w}||}\underset{n}{min}[t_n(\mathbf{w}^T\mathbf{\phi}(\mathbf{x}_n) + b)]\}
\end{aligned}
今、\kappa \gt 0 \mathbf{w} \rightarrow \kappa\mathbf{w} \: and \: b \rightarrow \kappa b
\begin{aligned}
t_n(\mathbf{w}^T\mathbf{\phi}(\mathbf{x}_n) + b) = 1
\end{aligned}
となるように\mathbf{w}, b
\begin{aligned}
t_n(\mathbf{w}^T\mathbf{\phi}(\mathbf{x}_n) + b) \ge 1 \quad n = 1, ... , N \quad \cdots (\spadesuit)
\end{aligned}
となります。\frac{1}{||\mathbf{w}||} ||\mathbf{w}||^2
\begin{aligned}
\underset{\mathbf{w}, b}{min}\frac{1}{2}||\mathbf{w}||^2
\end{aligned}
を制約の下で考えればよいです。
!
解くべき問題(1)
\begin{aligned}
&\underset{\mathbf{w}, b}{min}\frac{1}{2}||\mathbf{w}||^2 \\
subject \: to \quad &t_n(\mathbf{w}^T\mathbf{\phi}(\mathbf{x}_n) + b) \ge 1
\end{aligned}
制約付き最適化問題をカーネル関数を用いて表す
解くべき問題(1)を解いてもいいのですが、ここでは最適化問題から\mathbf{\phi}(\mathbf{x}_n) k(\mathbf{x}_n, \mathbf{x}_m) = \mathbf{\phi}(\mathbf{x}_n)^T\mathbf{\phi}(\mathbf{x}_m) \mathbf{\phi}(\cdot)
a_n \ge 0
\begin{aligned}
L(\mathbf{w}, b, \mathbf{a}) = \frac{1}{2}||\mathbf{w}||^2 - \sum^N_{n=1}a_n\{t_n(\mathbf{w}^T\mathbf{\phi}(\mathbf{x}_n) + b) - 1\}
\end{aligned}
このとき、
\begin{aligned}
\underset{\mathbf{a} \ge \mathbf{0}}{max}L(\mathbf{w}, b, \mathbf{a}) = \left\{ \begin{array}{ll} \frac{1}{2}||\mathbf{w}||^2 & if \: t_n(\mathbf{w}^T\mathbf{\phi}(\mathbf{x}_n) + b) \ge 1 \\ +\infty & otherwise \end{array} \right.
\end{aligned}
であるので、解くべき問題(1)は次のように書き換えられます。
!
解くべき問題(2)
\begin{aligned}
&\underset{\mathbf{w}, b}{min}\:\underset{\mathbf{a}}{max}L(\mathbf{w}, b, \mathbf{a}) \\
subject \: to \quad &\mathbf{a} \ge \mathbf{0}
\end{aligned}
解くべき問題(2)のことを主問題といいますが、以下の問題のことを双対問題といいます。
\begin{aligned}
&\underset{\mathbf{a}}{max}\:\underset{\mathbf{w}, b}{min}L(\mathbf{w}, b, \mathbf{a}) \\
subject \: to \quad &\mathbf{a} \ge \mathbf{0}
\end{aligned}
今回は最小化したい関数とその制約が(適当な条件を満たす)凸関数であったことから主問題と双対問題の解が一致するので、解くべき問題(2)は次のように書き換えられます。
!
解くべき問題(3)
\begin{aligned}
&\underset{\mathbf{a}}{max}\:\underset{\mathbf{w}, b}{min}L(\mathbf{w}, b, \mathbf{a}) \\
subject \: to \quad &\mathbf{a} \ge \mathbf{0}
\end{aligned}
L(\mathbf{w}, b, \mathbf{a}) \mathbf{w}, b L(\mathbf{w}, b, \mathbf{a}) \mathbf{w}, b
\begin{aligned}
\frac{\partial L(\mathbf{w}, b, \mathbf{a})}{\partial \mathbf{w}} = 0 &\Leftrightarrow \mathbf{w} = \sum^N_{n=1}a_nt_n\mathbf{\phi}(\mathbf{x}_n) \quad \cdots (\clubsuit) \\
\frac{\partial L(\mathbf{w}, b, \mathbf{a})}{\partial b} = 0 &\Leftrightarrow \sum^N_{n=1}a_nt_n = 0
\end{aligned}
これらを代入して制約に加えると、
!
解くべき問題(4)
\begin{aligned}
&\underset{\mathbf{a}}{max}\sum^N_{n=1}a_n - \frac{1}{2}\sum^N_{n=1}\sum^N_{m=1}a_na_mt_nt_mk(\mathbf{x}_n, \mathbf{x}_m) \\
subject \: to \quad &\mathbf{a} \ge \mathbf{0}, \:\sum^N_{n=1}a_nt_n = 0
\end{aligned}
となります。ここで、k(\mathbf{x}_n, \mathbf{x}_m) = \mathbf{\phi}(\mathbf{x}_n)^T\mathbf{\phi}(\mathbf{x}_m) \mathbf{\phi}(\mathbf{x}_n)
予測する
(\clubsuit)
\begin{aligned}
y(\mathbf{x}) = \sum^N_{n=1}a_nt_nk(\mathbf{x}, \mathbf{x}_n) + b
\end{aligned}
ここで、(\spadesuit) t_n = 1 n
\begin{aligned}
&t_n(\sum^N_{m=1}a_mt_mk(\mathbf{x}_n, \mathbf{x}_m) + b) \ge 1 \\
\Rightarrow \: &b \ge t_n - \sum^N_{m=1}a_mt_mk(\mathbf{x}_n, \mathbf{x}_m) \\
\Rightarrow \: &b = \underset{n}{max}\: 1 - \sum^N_{m=1}a_mt_mk(\mathbf{x}_n, \mathbf{x}_m)
\end{aligned}
このy(\cdot) \mathbf{x}_{N+1} y(\mathbf{x}_{N+1}) \ge 0 t_{N+1} = 1 y(\mathbf{x}_{N+1}) \lt 0 t_{N+1} = -1
実装
import文
cvxpyは凸最適化モデリングツールです。制約付き最適化問題をこのライブラリで解きます。
import cvxpy as cp
import numpy as np
import matplotlib. pyplot as plt
from sklearn. datasets import make_classification
カーネル
今回はカーネル関数として以下のガウスカーネルを用います。\gamma = 8
\begin{aligned}
k(\mathbf{x}_n, \mathbf{x}_m) = exp(-\gamma||\mathbf{x}_n - \mathbf{x}_m||^2)
\end{aligned}
def gauss_kernel ( x1, x2, gamma= 8 ) :
return np. exp( - gamma * np. dot( x1 - x2, x1 - x2) )
以下は、K_{nm} = k(\mathbf{x}_n, \mathbf{x}_m) K
def kernel_matrix ( kernel, X) :
K = np. zeros( ( len ( X) , len ( X) ) )
for i in range ( len ( X) ) :
for j in range ( len ( X) ) :
K[ i] [ j] = kernel( X[ i] , X[ j] )
return K
使用するデータ
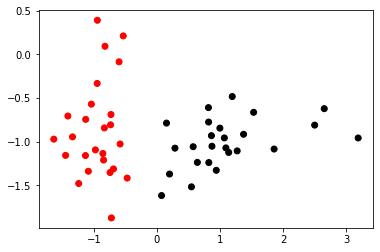
今回はランダムに生成された、入力変数が2次元で目的変数が1か-1である50個のデータを分類します。黒色のデータがt_n = 1 t_n = -1
N = 50
X, t = make_classification( random_state= 28 ,
n_samples= N,
n_features= 2 ,
n_redundant= 0 ,
n_informative= 2 ,
n_clusters_per_class= 1 ,
n_classes= 2 )
t[ t == 0 ] = - 1
K = kernel_matrix( gauss_kernel, X)
plt. scatter( X[ : , 0 ] , X[ : , 1 ] , c= t, cmap= "flag" )
制約付き最適化問題を解く
解くべき問題(4)に従います。
a = cp. Variable( N)
obj = cp. Maximize( cp. sum ( a) - 1 / 2 * cp. quad_form( a, ( t * K. T) . T * t) )
constraint = [ a >= 0 ] + [ a. T @ t == 0 ]
prob = cp. Problem( obj, constraint)
prob. solve( )
予測
y(\mathbf{x})
def predict ( a, X, t, b, kernel) :
a = a
X = X
t = t
b = b
kernel = kernel
def closure ( x) :
ret = b
for i in range ( N) :
ret += a. value[ i] * t[ i] * kernel( x, X[ i] )
return ret
return closure
b
b = np. max ( [ t[ n] - np. sum ( [ a. value[ m] * t[ m] * K[ n] [ m] for m in range ( N) ] ) for n in range ( N) if t[ n] == 1 ] )
pre = predict( a, X, t, b, gauss_kernel)
描画の準備です。
NUM = 100
x1_line = np. linspace( - 2.5 , 3.5 , NUM) . reshape( - 1 , 1 )
x2_line = np. linspace( - 2.5 , 1.0 , NUM) . reshape( - 1 , 1 )
x1_grid, x2_grid = np. meshgrid( x1_line, x2_line)
ps = np. zeros( ( NUM, NUM) )
for ( i, x1) in enumerate ( x1_line) :
for ( j, x2) in enumerate ( x2_line) :
ps[ j] [ i] = pre( np. array( [ x1[ 0 ] , x2[ 0 ] ] ) )
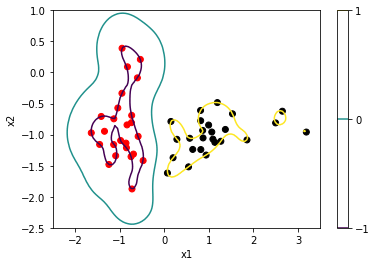
描画コードです。新たな入力\mathbf{x}_{N+1} t_{N+1} = 1 t_{N+1} = -1
plt. scatter( X[ : , 0 ] , X[ : , 1 ] , c= t, cmap= "flag" )
plt. xlabel( 'x1' )
plt. ylabel( 'x2' )
plt. contour( x1_grid, x2_grid, ps, levels= [ - 1.0 , 0 , 1.0 ] )
plt. colorbar( )
サポートベクターマシンのスパース性について
この記事の理論の部分では示しませんでしたが、全てのn = 1, ... , N a_n = 0 t_ny(\mathbf{x}_n) = 1 a_n = 0 a_n \gt 0
参考
書籍
Webサイト
Discussion