Kinoveaツール計測のチップス
海洋ロボコンをやってた人です。
ここではKinoveaで計測するためのチップスを備忘録かつノウハウ共有として記載していきます。
本記事に対するコメントも積極的に募集しますので、よろしくお願いいたします。
※1 関係者確認済みです。
※2 OAではないですが、公開済み内容かつお試しデータです。
1. インストール・セットアップ
1.1 事前準備
- Kinoveaのインストール
2024/11/01現在ではKinovea-2023.1.2.exeです
公式サイトからインストールしてください。
- Kinovea 日本語マニュアルのダウンロード
日本語マニュアルなので、こちらで細かな操作方法は参照してください。
1.2 セットアップ
Kinoveaでは動画解析を行うため、その前ステップとして実験時の動画が必要になります。
実験動画を撮影するための事前準備としては以下が必要になります。
- キャリブレーション用の平面較正ライン
- 実機
- カメラ (三脚)
- トラッキング用マーカー(色が実機と異なるものが良い)
- 根気
👆をセッティングした上で、実験動画を取得したらKinoveaソフトを起動し、以下のインプットに対してアウトプットを取得します。
Kinoveaソフトへのインプット
- 実験時の動画ファイル
Kinoveaソフトからのアウトプット
- 位置、速度情報を含んだCSVファイルなど
- 軌跡を含んだ動画ファイル(任意)
2. Analysis
ここからはKinovea での解析方法を記載します。
Kinovea を開いたら、動画を読みこんでおきましょう。
※ ファイルが読み込めない、空のファイルと表示される場合は以下を試してください。
-
動画ファイルの格納先を変える(デスクトップ → Videoフォルダ)
-
再エンコーディング (動画編集ソフト等で再レンダリング)
私はデスクトップ配置からビデオ/キャプチャへ配置したら、読み込めるようになりました。OSの問題かもしれません。。。
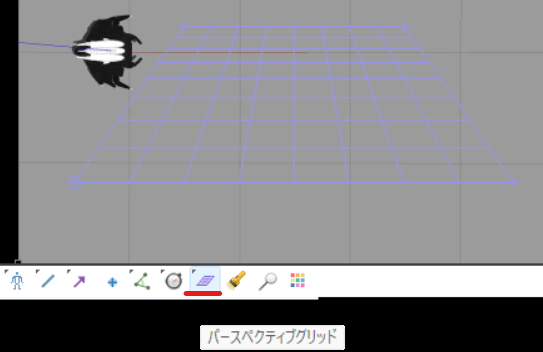
2.1 パースペクティブグリッド
まずはグリッドを準備していきます。以下手順を記します。
-
赤線のパースペクティブグリッドをクリック
-
画面をクリック(グリッドが表示される)
-
グリッドの四角をドラッグして、平面較正ラインにそろえる
-
グリッドの四角を右クリック >
設定を選択し、グリッドカラーを見やすい色へ変更する -
グリッドの四角を右クリック > で
較正を選択し、単位と較正ラインの長さを入力する
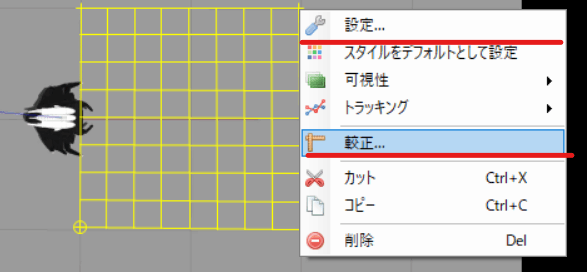

これで、グリッドの設定は終了です。
2.2 軌道追跡
- トラッキングマーカー(目印になる色が実機と異なるもの)上で右クリックし、
軌道追跡を選択
※ 下図では白部分をマーカー代用しています。

-
軌道追跡用のグリッドが表示されるので、グリッド上で右クリック >
設定でカラーを見やすい色へ変更する -
ラベルで「位置」を選択して座標が取得できるように設定する
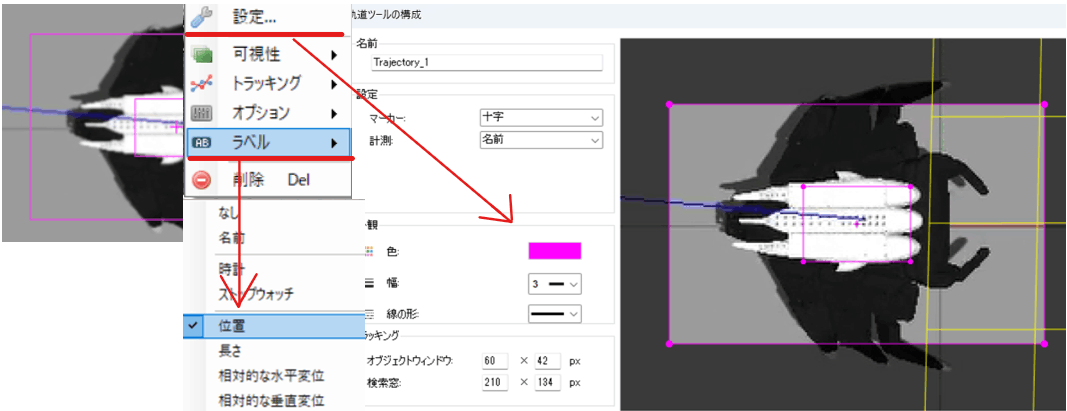
-
下図①をドラッグして動画の再生範囲を制限しておく
-
下図②再生ボタンを押すことで、動画の再生に合わせて自動で軌道追跡が開始される
-
軌道追跡用のマーカーが、トラッキング用マーカーとズレたら動画を止めて位置を修正する
-
計測範囲で正しくトラッキングのラインが作れるまで5. 6.を繰り返す

これで軌道追跡は終了です。
2.3 データ出力
ここまで完了したら、最後はデータ出力です。
- ファイル > スプレッドシートのエクスポート > 軌跡CSV… を選択してデータを出力する

- CSVファイルを開き、Time, X, Yから速度を算出する

これでデータ出力は終了です。
以上です。
Likeいただけると大変励みになりますので、よろしくお願いいたします。
Discussion