Autodesk Fusionで減速機をつくるチップス
海洋ロボコンをやってた人です。
ここではAutodesk Fusion (旧Fusion360)で減速機をつくるチップスやFusion360のメモ書きとして残しておきたい機能を備忘録として記載していきます。
機械屋さんでないので、間違い等あればご指摘ください。
動作環境は以下です。
- OS: Windows 10
本記事に対するコメントも積極的に募集しますので、よろしくお願いいたします。
1. Cycloidal Drive:サイクロイド減速機
以下のプラグインを使用してサイクロイド減速機を作成
サイクロイド減速機をAutodesk Fusion (旧Fusion360)で作成するために使用するプラグインをインストール
ベアリング、ブッシュ、リニアシャフト等を使用し、摺動面、摩擦を少なくし、剛性の高い材料を使用するなど工夫することで、伝達効率を上げることが必要になります
CNCなどで加工する場合は加工精度が出ると思いますが、3Dプリンターなどでは膨張分を考慮すること。
また、バックラッシ(歯車間の隙間)の適切な設計も重要
サイクロイド減速機の減速比は、外ピンの数:
Cycloidal Disk Profile Constraintsも以下を参照
Development of a Lightweight and High-efficiency Compact Cycloidal Reducer for Legged Robots
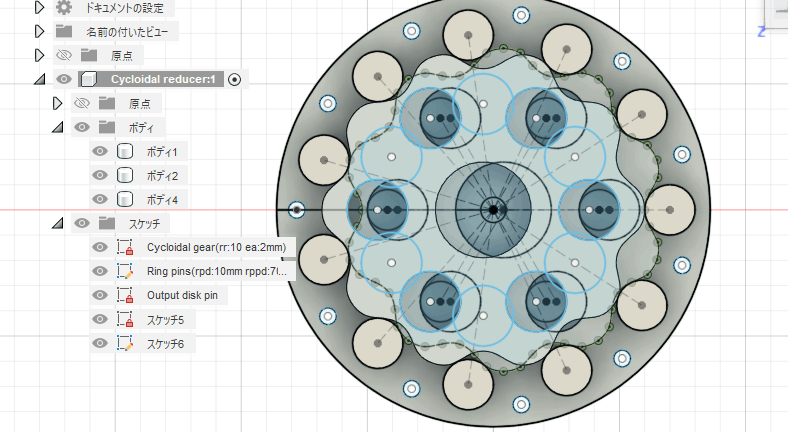
1.1 パラメータ設定、外観スケッチ
参考例を以下に示す
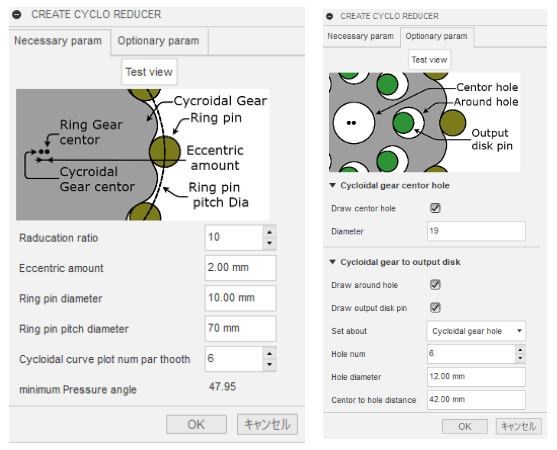
- Necessary param(必須)
| Item | JP | Value |
|---|---|---|
| Raducation ratio | 歯数 | 10 |
| Eccentric amount | 偏心量 | 2.0 mm |
| Ring pin diameter | 外ピン直径 | 10.0 mm |
| Ring pin pitch diameter | 外ピン間の距離 | 70 mm |
| Cycloidal curve plot num par thooth | 歯毎サイクロイド曲線プロット数 | 6 |
- Optional param(任意)
| Item | JP | Value |
|---|---|---|
| Diameter | 偏心軸の直径 | 19 mm |
| Draw around hole | ギア内の穴描画 | チェック |
| Draw output disk pin | 内ピン描画 | チェック |
| Hole num | 内ピン用の穴数 | 6 |
| Hole diameter | 内ピン用の直径 | 12.0 mm |
| Center to hole distance | 内ピン間の距離 | 42.0 mm |
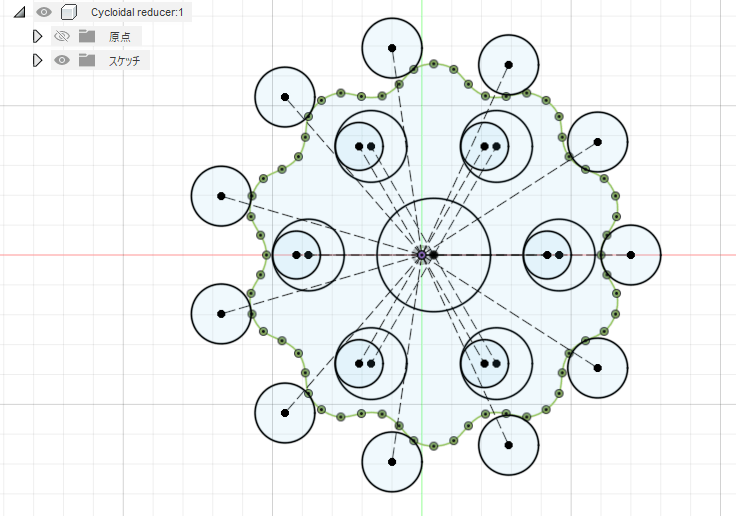
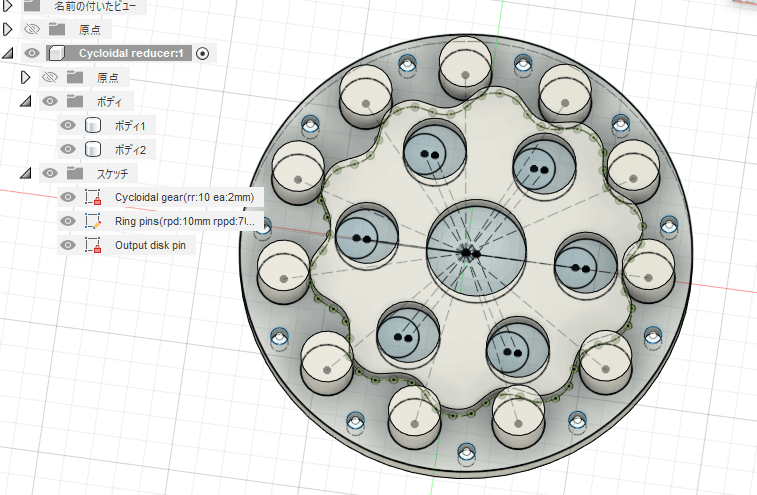
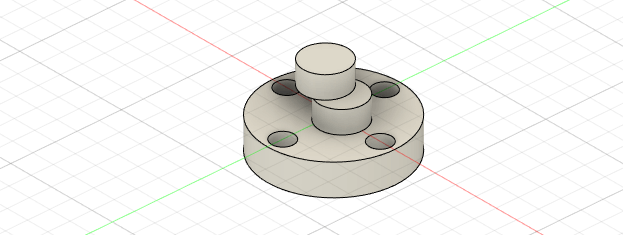
出力すると以下のような形になります
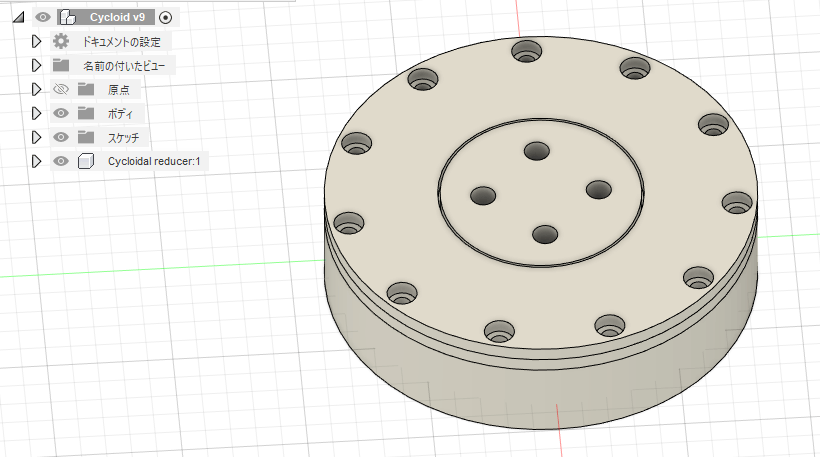
キャリアピンとケースの作成
1.2 偏心による振動抑制
サイクロイド歯車2枚を180°位相をずらし使用することで、偏心による振動の抑制を行う
今回の場合は、フィーチャ編集 > オブジェクトを移動で90°回転で180°位相をずらすことができます。
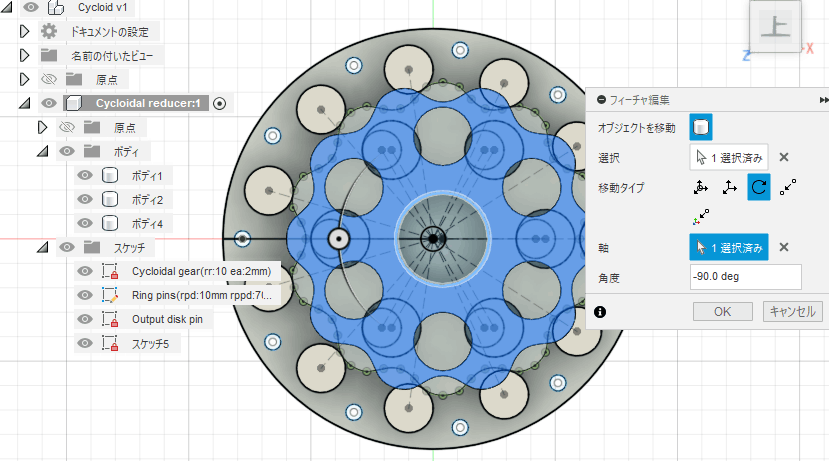
偏心量は2.0なので、4mm分X軸方向に移動

内ピンの場所もスケッチで追加
1.3 各パーツの作製
入力軸
出力軸
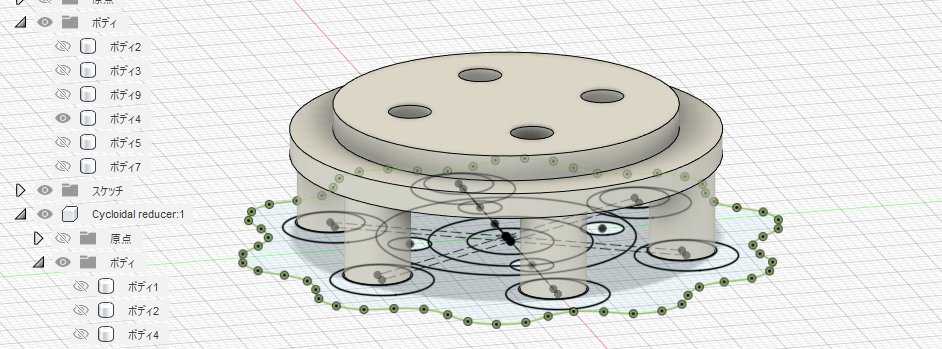
全体
動作の様子
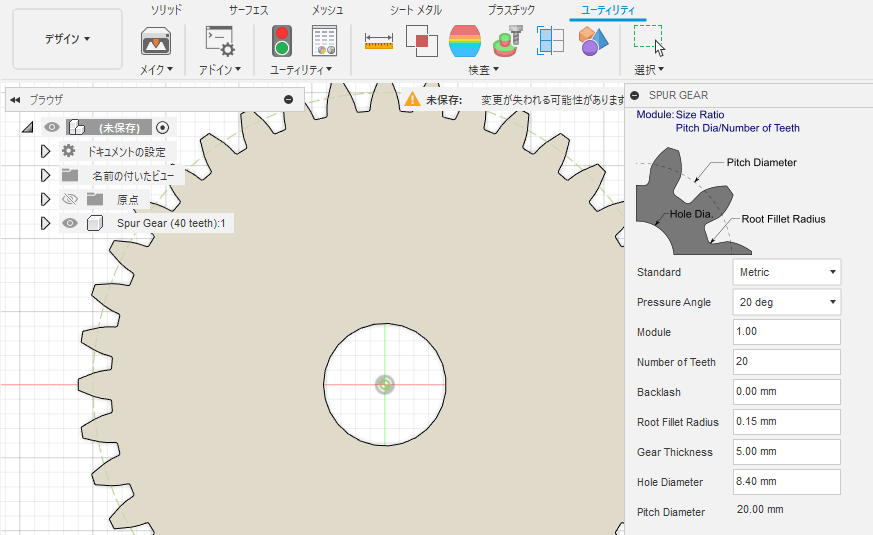
2. SPUR Gear:平歯車
標準アドインを使用
Reference
- Cycloidal Drive
How To Mechatronics :What is Cycloidal Driver? Designing, 3D Printing and Testing
Youtube:rough robotics:サイクロイド減速機(Cycloidal Drive)作ってみた!【CeVIO】
Youtube:稚晖君:Nano Cycloid Actuator
Youtube:Variadores y Controles:Reductor Cicloidal
Youtube:DIY Cycloidal Laser-Cut All-Metal Robotic Actuator: Durable!
- 一言
自作するのも楽しいけど、既成品買ったほうが精度、トルク、手間がかからなくて良いとも思います。
Discussion