📌
論文要約:SuPerPM: A Large Deformation-Robust Surgical Perception Framework
SuPerPM: A Large Deformation-Robust Surgical Perception Framework Based on Deep Point Matching Learned from Physical Constrained Simulation Data
概要
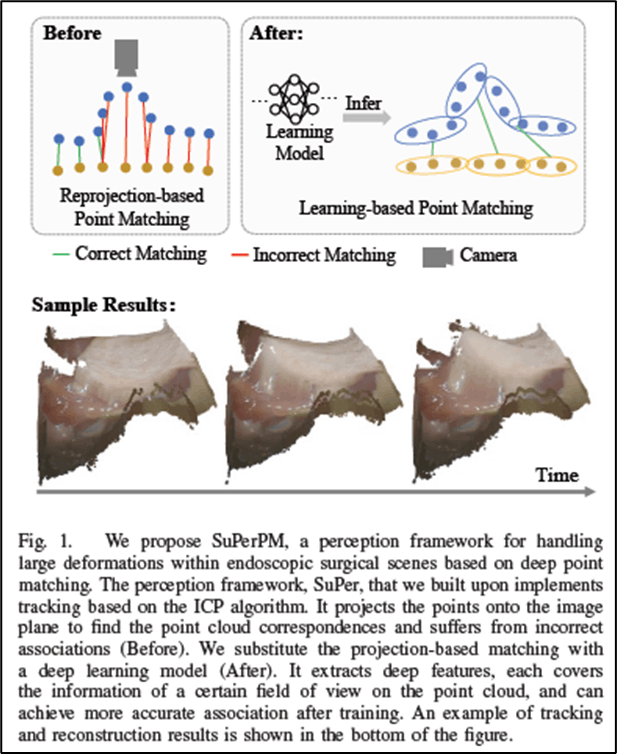
手術シーントラッキング。シミュレーションを用いて、非剛体点群マッチングを学習する、SuPerPMを提案。生体のより大きな変形に対応可。SOTA。
書誌情報
2023/9/25
Shan Lin、他
カリフォルニア大学
背景・目的
手術シーントラッキング。
外科手術では生体が大きく変形するため、トラッキングは容易ではない。
外科手術で点群マッチングの学習データを収集するのは容易ではない。
方法
シミュレーションを用いて、非剛体点群マッチングを学習する、SuPerPMを提案。
生体のより大きな変形に対応。
手術ロボットで組織を操作、内視鏡画像を収集、異なる時点の間で点群を対応付け、点群マッチングの学習データとする。
位置ベースのダイナミクス(Position-Based Dynamics、PBD)シミュレーションでデータ生成するので、高精度に正解データを生成できる。
before SuPer ICP(Iterative Closest Point)アルゴに基づく。対応付けを誤る。
after DLに変更。
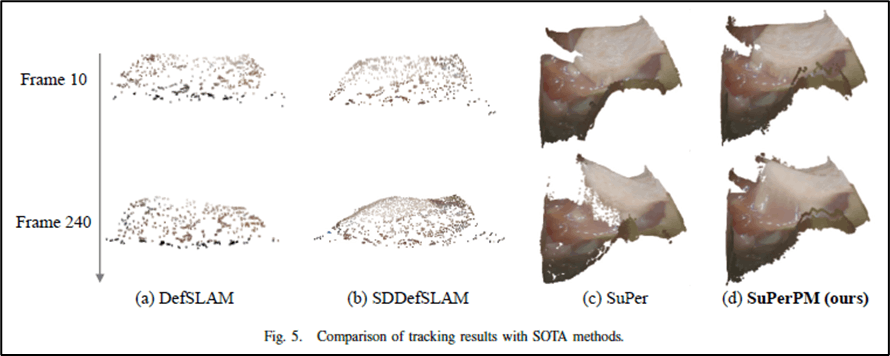
Lepard+SuPer。Lepard。
上 SuPer。
下 Lepard 点群マッチング学習。PBDシミュレーションデータでファインチューニング。
ICPより生体の大きな変形にロバスト。

データ生成パイプライン。

データ収集。ステレオ内視鏡。

結果・考察
変形が大きい外科手術データセットで、SOTA。
Discussion