ESP32とスマホでBLE通信をする.そしてロボットを動かす.
はじめに
この記事は弊ロボコンサークルの初心者向け教育資料として、大量にあったESP32-S3を使って最小構成機体を動かしてもらうために作成しました。筆者自体も初心者なので、拙い部分は大目に見てください。
ESP32はBluetoothが使えます.今回は,ESP32-S3-devkitc-1を使います.
ESP32-S3は,BLE通信のみで,PS4などのclassicBluetoothは使えません.
そこで今回は,スマホアプリ”MicroBlue”を使って,ESP32とスマホ間でBLE通信を試みます.
0. 使用するロボットとブロック図と回路図
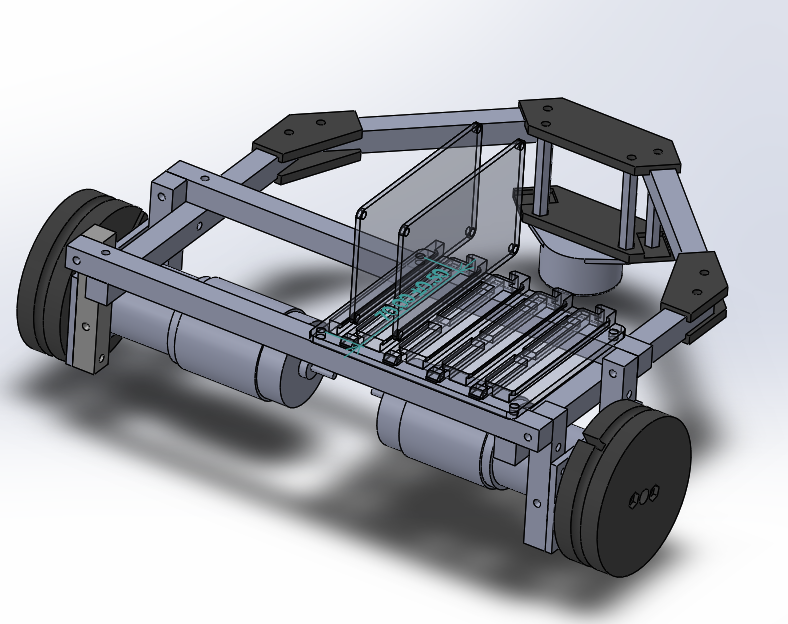
ブロック図

パワー配線

制御配線

1. 環境構築
ESP32用のArduino環境をセットアップ
まず、ESP32-S3をArduino IDEで使えるようにします。
-
Arduino IDEのインストール
- 公式サイトからダウンロード: https://www.arduino.cc/en/software
-
ESP32ボードマネージャのインストール
- Arduino IDEを開く
- [ファイル] → [環境設定] を開く
-
追加のボードマネージャのURL に以下を入力:
https://raw.githubusercontent.com/espressif/arduino-esp32/gh-pages/package_esp32_index.json - [ツール] → [ボード] → [ボードマネージャ] を開き、「ESP32」を検索
- 「esp32 by Espressif Systems」をインストール
-
ESP32-S3用のボードを選択
- [ツール] → [ボード] から "ESP32S3 Dev Module" を選択
3. ESP32-S3のスケッチ
iPhoneとESP32-S3をBLE通信させるには、ESP32を BLE Peripheral(サーバー) として動作させ、iPhone側を BLE Central(クライアント) として操作します。
コードと使用例
以下のリポジトリから、"myBLEController.h"、"myBLEController.cpp"をダウンロードして、
main.inoと同じディレクトリに配置して下さい。
使用例
以下では、タイマー割込みでBLE通信を読み取りを行っています。
スマホから飛んでくるx,yの値が 0 ~ 1023 なので原点を機体と一致させるために、
中央値を引いてx,yに格納、このx,yを使ってモーターへ出力しています。
#include <Arduino.h>
#include "myBLEController.h"
hw_timer_t *timer = NULL; // タイマーのポインタ
void onTimer();
// グローバルにインスタンスを用意
MyBLEController myBLE;
#define MR_PWM 4
#define MR_DIR 5
#define ML_PWM 6
#define ML_DIR 7
void setup() {
Serial.begin(115200);
// BLE初期化
myBLE.begin("My BLE Controller"); // 広告するデバイス名
timer = timerBegin(1000); // タイマーを1kHzで初期化
timerAttachInterrupt(timer, &onTimer); // 割り込み関数を設定
timerAlarm(timer, 50, true, 0); // 50msごとに割り込みを発生させる
pinMode(MR_PWM,OUTPUT);
pinMode(MR_DIR,OUTPUT);
pinMode(ML_PWM,OUTPUT);
pinMode(ML_DIR,OUTPUT);
}
static std::array<std::array<int, 2>, 2> current;
int x = 0;
int y = 0;
void IRAM_ATTR onTimer() {
// 何かキーが受信されていれば確認
// static String lastVal;
current = myBLE.getLastReceived();
Serial.print("d0:");
Serial.print(current[0][0]);
Serial.print(current[0][1]);
Serial.print(",d1:");
Serial.print(current[1][0]);
Serial.println(current[1][1]);
x = (current[0][0] - 512);
y = (current[0][1] - 512);
}
float ml_power = 0;
float mr_power = 0;
void loop() {
analogWrite(ML_PWM, 0);
analogWrite(MR_PWM, 0);
ml_power = 255*(-x+y)/1024;
mr_power = 255*(-x-y)/1024;
analogWrite(ML_PWM, abs(ml_power));
analogWrite(MR_PWM, abs(mr_power));
if(ml_power>0) digitalWrite(ML_DIR,1);
else digitalWrite(ML_DIR,0);
if(mr_power>0) digitalWrite(MR_DIR,1);
else digitalWrite(MR_DIR,0);
Serial.print(ml_power);
Serial.println(mr_power);
delay(50);
}
ESP32への書き込み
最初は,"ESP32 familydevice"と認識されるはず.
ツール → ボード → ESP32 → ESP32S3 Dev Module
にボードを変更する.

すると,ツールにオプションが出てくる.これを適切に設定する.
とりあえず下記のように設定すればOK(各設定項目の説明は最後に記す.
)

書き込み
ESP32に書き込む.ESP32が起動すると,自動でサーバーが立つ.
書き込みに失敗するよくあるパターンとして,ESP32がブートモードになっていない場合がある.
手動ブートモード:BOOTボタンを押しっぱなし → RESET → 指を離す順番で試す。
BLE通信
MicroBlueを起動し,右上のBluetoothマークから,"myBLEcontroller"を選択.
操作画面の"d0"のjoyコン、もしくは十字キーで操作することができます。
動かす
以下は、Arduino IDEの「ツール」メニューで選択できるESP32-S3の設定項目の説明です。
1. USB CDC On Boot: "Enabled"
- CDC (Communications Device Class)を有効化するかどうか
Enabledにすると、ESP32-S3が仮想シリアルポートとして認識される- これを有効にすると、USBケーブルでESP32-S3とPC間のシリアル通信が可能になる
2. CPU Frequency: "240MHz (WiFi)"
- ESP32-S3の動作クロック(CPU速度)
-
240MHzはESP32-S3の最大クロック速度 -
WiFiと書かれているのは、この設定がWiFi利用時の推奨設定であるため
3. Core Debug Level: "None"
- デバッグログの出力レベル
-
Noneにするとデバッグメッセージが表示されない -
Verboseにすると詳細なデバッグ情報が出る(開発時には便利だが、動作が遅くなる)
4. USB DFU On Boot: "Disabled"
- DFU(Device Firmware Update)を有効にするかどうか
- DFUを有効 (
Enabled) にすると、ESP32-S3をUSB経由でファームウェア更新できる -
Disabledにすると通常のUART経由での書き込みのみ可能
5. Erase All Flash Before Sketch Upload: "Disabled"
- スケッチを書き込む前にフラッシュメモリを全消去するかどうか
-
Enabledにすると、毎回フラッシュメモリが完全消去される(問題が発生したときのリセット用) -
Disabledにすると、前のデータが部分的に残る(通常はこれでOK)
6. Events Run On: "Core 1"
- ESP32-S3のどのCPUコアでイベントを処理するか
- ESP32-S3はデュアルコア (
Core 0&Core 1) を持つ -
Core 1は通常、WiFiやBLEの処理に使われる
7. Flash Mode: "QIO 80MHz"
- フラッシュメモリのアクセスモードと速度
-
QIO (Quad Input/Output)は4本のデータ線を使って高速アクセスするモード -
80MHzはフラッシュの動作クロック
8. Flash Size: "4MB (32Mb)"
- ESP32-S3のフラッシュメモリ容量
-
4MB(=32メガビット)のストレージが使える - より大きな容量のESP32-S3ボードもある(例:
8MB、16MB)
9. JTAG Adapter: "Disabled"
- JTAGデバッグを有効化するか
-
EnabledにするとJTAG(ハードウェアデバッグ)が使えるが、通常はDisabledで問題ない
10. Arduino Runs On: "Core 1"
- Arduinoスケッチが動作するCPUコア
-
Core 1にすると、WiFiやBLEと同じコアでスケッチが動作する -
Core 0に変更すると、WiFiとは別のコアでスケッチが実行される(リアルタイム処理向け)
11. USB Firmware MSC On Boot: "Disabled"
- ESP32-S3をUSBストレージデバイスとして起動するか
-
Enabledにすると、PCにUSBメモリのように認識される -
Disabledの場合は通常の動作
12. Partition Scheme: "Default 4MB with spiffs (1.2MB APP/1.5MB SPIFFS)"
- ESP32-S3のフラッシュメモリのパーティション構成
-
APP 1.2MB:プログラム用の領域 -
SPIFFS 1.5MB:SPI Flash File System(データ保存用)
他のオプション:
- "No OTA (2MB APP/1.5MB SPIFFS)" → OTA(Over-the-Air)アップデートなし、アプリ領域が広い
- "Minimal SPIFFS (1.9MB APP/190KB SPIFFS)" → アプリの領域を最大化
13. PSRAM: "Disabled"
- ESP32-S3に追加のPSRAM(Pseudo-SRAM)がある場合に有効化
-
Enabledにすると、大量のメモリが必要な処理(画像処理など)が可能になる -
Disabledなら内蔵RAMのみ使用
14. Upload Mode: "UART0 / Hardware CDC"
- プログラムの書き込み方式
-
UART0→ シリアルポート経由で書き込み -
Hardware CDC→ USB経由で書き込み(通常はこっちでOK)
15. Upload Speed: "921600"
- ESP32-S3へのプログラム書き込み速度(ボーレート)
-
921600は高速設定(通常はこれでOK) - もし書き込みに失敗する場合は
115200に変更
16. USB Mode: "Hardware CDC and JTAG"
- USBの機能設定
-
Hardware CDC→ USBシリアル通信を有効化 -
JTAG→ ハードウェアデバッグも有効
17. Zigbee Mode: "Disabled"
- Zigbee通信機能を有効にするか
-
DisabledならZigbee通信はオフ - ESP32-S3の一部のモデルはZigbeeをサポートするが、通常は不要
Discussion