Windows C/C++環境でRaspberry Pi Pico Wを動かす
はじめに
Raspberry Pi Pico WのWindows C/C++開発環境のセットアップ方法についてまとめます。
動作検証はLチカと"Hello World"のUSBシリアル通信を行います。
ツールチェインのインストール
インストーラーがpico-setup-windowsリポジトリで提供されています。
READMEの"Download the latest release"からインストーラーをダウンロードします。
ダウンロードしたインストーラーを実行してセットアップを行います。
インストール時の設定は特に必要がなければそのままで大丈夫です。
インストールが完了すると、pico-examples リポジトリのクローンとビルドが自動的にかかります。
ツールの起動
Windowsのスタートメニューから"Pico - Visual Studio Code"を実行します。
pico-examplesを以下のパスから開きます。
C:\Users<user-name>\Documents\Pico-<version>>\pico-examples
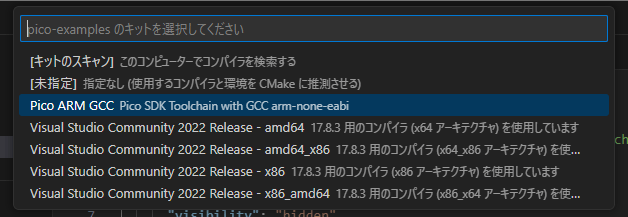
CMAKEのキットは"Pico ARM GCC"を選択します。
ビルド環境の設定
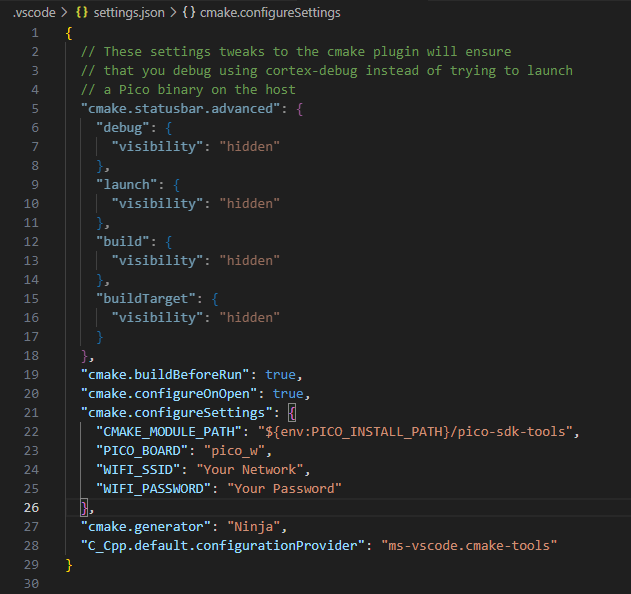
".vscode\settings.json"の"cmake.configureSettings"に以下のようにパラメータを追加します。
動作検証
Lチカ
サイドバーからCMAKEを選択して"pico_examples/pico_w/wifi/blink/picow_blink"を選びビルドします。

ラズパイにフラッシュを行います。
BOOTSELボタンを押しながらUSBをPCに差すことでエクスプローラー上にストレージとして表示されます。(自分の環境では"RPI-RP2"と表示されました。)
以下のパスにあるUF2ファイルをラズパイにコピーします。
<pico-examples>\build\pico_w\wifi\blink\picow_blink.uf2
コピーが完了すると自動的にストレージから取り外されLEDが点滅します。
Hello World
サイドバーからCMAKEを選択して"pico_examples/hello_world/usb/hello_usb"を選びビルドします。

Lチカと同様の手順でラズパイにフラッシュを行います。
UF2ファイルは以下にあります。
<pico-examples>\build\hello_world\usb\hello_usb.uf2
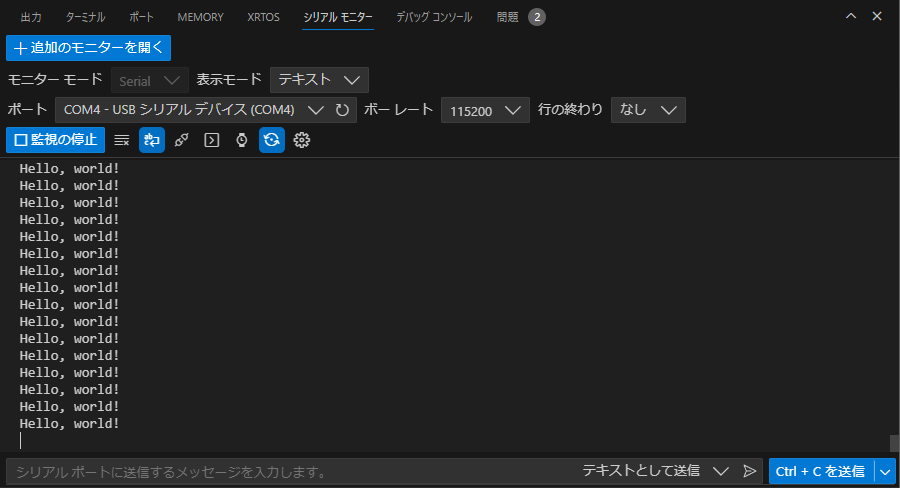
ラズパイから送信されるデータを確認します。
コンソールから"シリアルモニター"を選択します。
ポートの選択を選択して"▷監視の開始"をクリックするとラズパイからの送信をモニターできます。
(自分の環境はポート"COM4"でした。)
新規プロジェクトの作成方法
- pico-example内にある以下のファイル/フォルダを新規プロジェクトにコピーします。
- <pico-examples>\pico_sdk_import.cmake
- <pico-examples>.vscode
-
CMakeLists.txtを以下のように記載することでSDKを使用できるようになります。
cmake_minimum_required(VERSION 3.13)
# initialize the SDK based on PICO_SDK_PATH
# note: this must happen before project()
include(pico_sdk_import.cmake)
project(my_project)
# initialize the Raspberry Pi Pico SDK
pico_sdk_init()
# rest of your project
Discussion