Transformerを理解したい
Transformerを理解したい記事です。
Transformerが提案された論文「Attention is All you need」をベースにまとめていきます。
以下の知識があることを前提としています。
- Deep Learningに関する基礎的な知識
- RNNに関する基礎的な知識
- 上記に関連する数学的知識
大雑把に言えば、Deepは使っているけどTransformer関連だけは経験がないような人向けになります。
Transformer誕生の背景
Transformerは、自然言語処理など系列モデリングの文脈で登場したモデルです。
入力系列を別の系列に変換するタスクはSeq2Seqと呼ばれ、入力を隠れ状態にエンコードするEncoderと、出力系列へ変換するDecorderからなるため、Encoder-Decoderモデルとも呼ばれます。
Transformer登場以前のDeep LearningによるEncoder-DecoderモデルにはRNNベースのモデルが使われていました。しかし、RNNベースのEncoder-Decoderモデルには以下の問題がありました。
- Encoderの出力が固定長ベクトルになる。
- Decoderへの入力が、Encoderから出力された最後の隠れ層のみ。
これらの問題を解決したのがTransfomerです。そして、その本質は、Transformerブロック内部にあるAttention機構にあります。以下でまとめていきます。
Transformerの構成要素
Transformerは以下のような構造をしています。

[1] Figure 1 より引用
Nxは、このブロックがN回繰り返されるという意味です。
Transformerを理解するには、この図にあるブロック
- Multi-Head Attention
- Positional Encoding
- Feed Forward
- Add & Norm
を理解する必要があります。また、Multi-Head Attentionを理解するためには、Attentionを理解しておく必要があります。
Attention
Multi-Head Attentionの前に、Attentionについて知っておきましょう。Attentionとその派生形であるMulti-Head Attentionは以下のような構造をしています。

[1] Figure 2 より引用
計算内容はともかく、Multi-Head Attentionは複数個のAttentionの計算結果を結合したものになっているのがわかると思います。
Attentionの概念
Attentionは入力のどの部分に注目するべきか選択する機構で、以下の式で与えられます。
一旦数学のことは忘れて用語だけ説明すると、クエリは検索キーワード、キーとバリューは辞書に対応します。つまり、入力された検索キーワードにもっとも近しいキーを選び、対応するバリューを得るということを上記の式は表しています。
- 近しいキーを選ぶ →
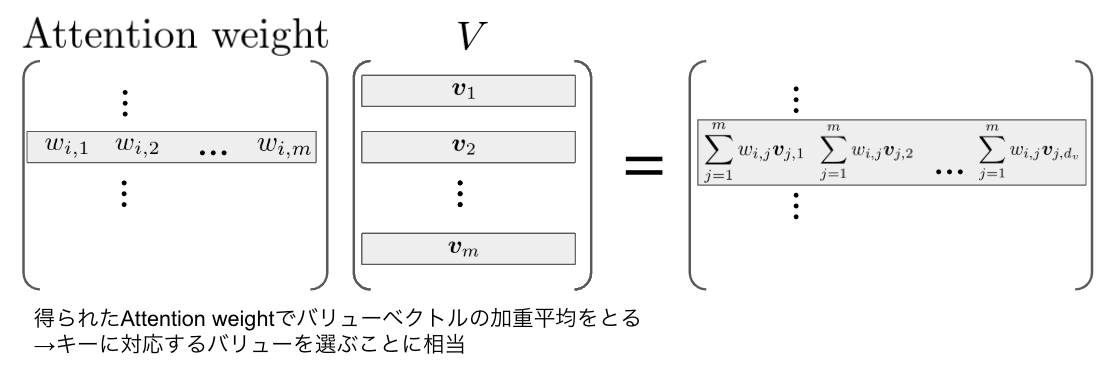
Q K - 対応するバリューを得る → softmaxの結果と
V
ということです。キーを選ぶといっても本当に1つの要素だけを選ぶと微分不可能になる不都合があるので、softmaxで代用しています。softmax後に最も値が大きい要素を選ぶと、我々が辞書を引くのと同じような「キーを選ぶ」という操作になります。「
Scaled Dot-Product Attention
さて、式 (1) はScaled Dot-Product Attentionというのが正式名称で、一般的にAttentionと呼ばれるものは大体これです。
Dot-Productというのが 式 (1) における
まず、

簡単のため、Attention weightの要素を
"Scaled"の謎
各要素が 1 の
ここで、
Multi-Head Attention
さて、ここまでAttentionことScaled Dot-Product Attentionの説明をしてきました。複雑に見えて原理は単純な事がわかったかと思います。そしてここまで学習可能なパラメータが一切出てきていないことに気が付いたでしょうか?つまり、単純な内積と加重平均のみでAttention機構は実現されています(すごい)。ただ、このままでは当然モデルの学習はできません。Attentionを学習可能な形にしたものがMulti-Head Attentionというわけです。
ここで、Multi-Head Attentionの図を見直してみましょう。Attention layerの入力前にLinear layerによる線形変換が行われていることがわかります。この部分がAttention機構の学習を担ってくれています。そして、
ここで、
なぜMulti-Headにしたかなのですが、その方が性能が良かったからと著者らは言っています。異なる位置の異なる部分空間表現を学習できるからとのことです(特にこれ以上のことは書かれていませんでした)。
K、Vの決め方
今まで
Positional Encoding
Multi-Head Attentionは系列の要素間の関係を学習することができますが、このままでは系列の順序まで考慮してくれません。そこで、Positional Encodingという手法で位置情報を入力へ足しこみます。
Position Encoding
ここで、
式で考えるより、グラフを見た方がわかりやすいのでこちらをご覧ください。

グラフを出力するコードは本記事の最後に記載しました。さて、なぜこれで位置をエンコーディングできるのでしょうか。グラフを解剖していきましょう。
位置のエンコード
positionごとに値をいくつか取り出すと以下のようになっています。

位置が変わるごとにくびれている位置が変化していっていますね。くびれの位置を見ればどの位置かわかります。
次元のエンコード
なんと、系列の位置だけでなく次元までエンコードているのがPositional Encodingの凄いところ。次元方向に値をいくつか取り出すと以下のようになっています。

周期を見ればどの次元かわかるようになっています。
Add & Norm
Add & Normalization layerの略です。名前の通りskip-connection由来の入力を足して、Normalizationする層です。Transformerで用いられているようなskip-connectionはresidual connectionと呼ばれており、ResNetの思想を受け継いだ構造になっています。residual connectionを入れることでより深い層での学習を可能にしています。
Residual connection
residual connectionを知っている人は読み飛ばして大丈夫です。
ResNet登場以前はVGG16、VGG19やGoogLeNetなどが深い層を持つモデルとされていたのですが、せいぜい20層程度の深さが限界でした。当時、Batch normalizationの登場により勾配消失・爆発問題は防ぎやすくなっていたものの、これ以上層を深くすると性能が劣化(degradation)する問題があったためです(下図)。

[2] Figure 2より引用
ResNetではこのresidual blockを用いることで、100以上の層を持つモデルでの学習を可能にしました(下図)。
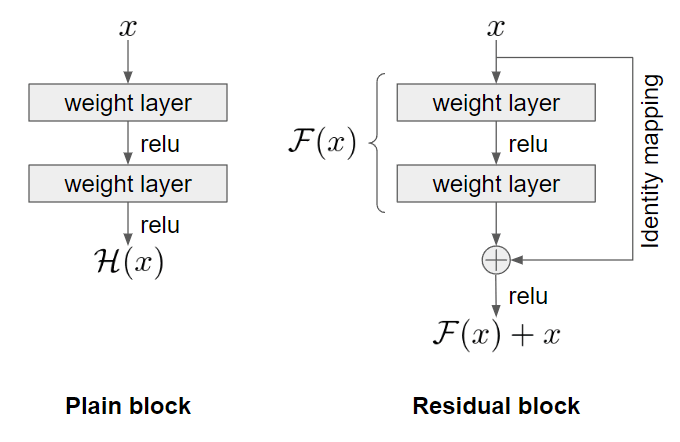
左が単なる直列のblock、右がresidual blockです。Identity mapping(恒等写像)が追加されただけですね。直感的理解としては、追加の層が不要でも
Layer Normalization
Normalizationにはlayer normalizationが用いられています(下図)。
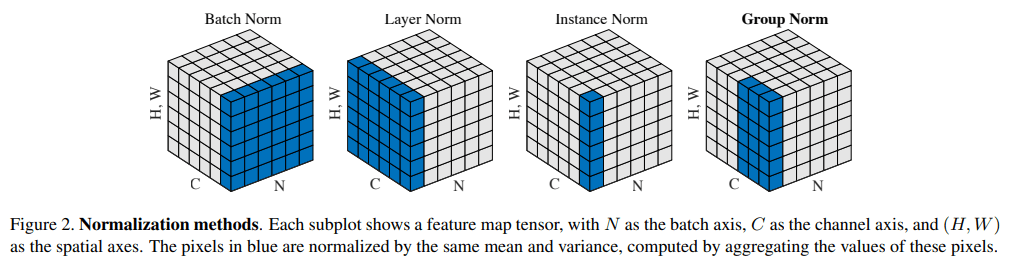
[3] Figure 2より引用
画像系から入ってきた人にはBatch Normalizationが馴染み深いと思うのですが、バッチサイズが小さいと値が不安定になる問題がありました。Layer Normalizationはバッチサイズに依存せず、一つのlayer内で正規化を行うことでこの問題を克服していることがわかると思います。
Feed Forward
図ではFeed Forwardとだけ書かれていましたが、[1]ではPosition-wise Feed-Forward Networksと呼んでいます。以下の式で与えられます。
まとめ
以上がTransformerを構成するブロックの全貌になります。Encoder、Decoder側でブロックを繰り返してやればTransformerの完成です(Decoder側2つ目のMulti-Head AttentionはEncoder側の
input/output embeddingやブロックの外のlinearはここでは説明していませんので悪しからず。Masked Multi-Head Attentionもここでは説明しませんでしたが、これは予測時に未来の情報がリークしないようにマスク処理が追加されたMulti-Head Attentionです。
付録
Positional Encodingのコード
import numpy as np
from numpy.typing import NDArray
import matplotlib.pyplot as plt
import seaborn as sns
def get_positional_encoding(pos: int, dmodel: int) -> NDArray[np.floating]:
"""Get positional encoding.
Parameters
----------
pos : int
position
dmodel : int
dimension of the feature
Returns
-------
pe : (dmodel,) NDArray[np.floating]
positional encoding
"""
pe = np.zeros(dmodel)
pe_odd = np.arange(0, dmodel, 2)
pe_even = np.arange(1, dmodel, 2)
pe[pe_odd] = np.cos(pos / (10000 ** (pe_odd / dmodel)))
pe[pe_even] = np.sin(pos / (10000 ** (pe_even / dmodel)))
return pe
pe = np.vstack([get_positional_encoding(i, 100) for i in range(100)])
fig, ax = plt.subplots(1, 1, figsize=(12, 4))
sns.heatmap(pe, ax=ax, cmap="viridis")
ax.set_ylabel("position", fontsize=16)
ax.set_xlabel("dimension", fontsize=16)
ax.set_title("position encoding", fontsize=16)
plt.show()
参考文献
- Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones, L., Gomez, A. N., Kaiser, L. & Polosukhin, I. (2017). Attention Is All You Need. arXiv. https://doi.org/10.48550/arxiv.1706.03762
- He, K., Zhang, X., Ren, S. & Sun, J. (2015). Deep Residual Learning for Image Recognition. arXiv. https://doi.org/10.48550/arxiv.1512.03385
- Wu, Y. & He, K. (2018). Group Normalization. arXiv. https://doi.org/10.48550/arxiv.1803.08494
- ゼロから作るDeep Learning ❷ ―自然言語処理編 - 斎藤 康毅
Discussion