Sparkle AI でインターンをしている駒澤です。
この度 Sparkle AI の新しいメンバーとして Unitree Go2 が到着したので紹介します!
Unitree Go2 は、AI を搭載し、LiDAR による高度な認識能力を備えた最新の四足歩行ロボットです。
Unitree Go2 とは?(Geminiの回答)
Unitree Go2とは?
Unitree Go2(ユニツリー・ゴーツー)は、中国の Unitree Robotics 社が開発した、一般消費者から研究開発者までを対象とする最新の四足歩行ロボット(ロボット犬)です。前モデルの Go1 から大幅な進化を遂げ、より高度な AI、優れたセンサー、高い運動性能を手頃な価格で実現しているのが大きな特徴です。
主な特徴と進化点
-
4D LiDAR 搭載による高度な空間認識
- 新開発の「4D LiDAR L1」を標準搭載。水平 360°×垂直90° という非常に広い範囲を認識でき、従来のセンサーの死角を大幅に削減しました。
- これにより、障害物の回避能力が格段に向上し、より複雑な環境でも自律的に行動できます。
-
AI 機能の強化(GPT 活用)
- 大規模言語モデル(GPT)の技術を活用し、AI がさらに賢くなりました。音声での対話やより複雑な命令の理解が可能です。
- ユーザーの命令に応じて、ロボットが自ら行動を判断し、実行することができます。
-
向上した運動性能と安定性
- モーターのトルク(力)が約 30% 向上し、よりパワフルで機敏な動きが可能になりました。走行速度は最上位モデルで秒速 5m(時速 18km)に達します。
- 階段の上り下り(最大 16cmの段差)や不整地での歩行も、よりスムーズかつ安定して行えます。
-
バッテリー性能の向上と自動充電
- 標準で 8,000mAh、オプションで 15,000mAh の大容量バッテリーが用意されており、約 2〜4 時間の連続稼働が可能です。
- 別売りの専用充電ドックを使えば、バッテリー残量が少なくなると自動で戻り充電を開始します。
-
アプリ連携と拡張性
- スマートフォンアプリを使って、リアルタイムの映像確認や遠隔操作が可能です。グラフィカルなプログラミングツールも用意されており、専門家でなくても直感的にロボットの動作をプログラムできます。
- 研究開発者向けには ROS(Robot Operating System)に対応した開発環境や、追加のセンサーやコンピュータを搭載できる拡張ポートが提供されています。
価格とターゲット
- 価格帯: 最も安価な「Air」モデルが約 20万円台からと、高性能な四足歩行ロボットとしては非常に手頃な価格設定になっています。上位モデルの「Pro」や研究開発者向けの「Edu」もラインナップされています。
-
ターゲット:
- 一般消費者: 最新技術に触れたいガジェット好きの方、ペットのようなコンパニオンロボットを求める方。
- 教育・研究機関: ロボット工学や AI プログラミングの教材として。
- 開発者: カスタム開発のプラットフォームとして。
まとめ
Unitree Go2 は、**「高性能でありながら、身近な存在になったAIロボット犬」**と言えます。死角の少ない高性能 LiDAR と賢い AI を搭載し、複雑な環境でも安定して動ける能力を持ちながら、価格は一般消費者でも手の届く範囲に抑えられています。エンターテイメントから本格的な研究開発まで、非常に幅広い可能性を秘めたロボットです。
この記事では、開封からスマホアプリ・ジョイスティック連携、そして安全な電源の切り方までを解説します。はじめて触る人でも迷わないよう、公式のマニュアル動画と実体験をベースにまとめました。
公式マニュアル動画(再生リスト)
https://www.youtube.com/playlist?list=PLJaMZYYjldgOS7IEZODioMkb_fMWphRoJ
Go2ドキュメント – PhysicalComputingLab by TechShare
https://physical-computing-lab.net/wp-content/uploads/Go2-User-Manual.pdf
開封の儀 – 箱の中身を確認する
外箱を開けると中にはキャスター付きのキャリーケースが入っていました。


キャリーケースを開けると Go2 本体がしっかり固定されています。付属品は次のとおり。
- Joystick コントローラー
- 充電器
- バッテリー × 2
- サポーター
- Depth カメラ(Optional)
ロボットの運搬の際にはキャリケースで持ち運びができて楽そうです。
初回起動
- バッテリーを本体に装着
- バッテリーのボタンを短押し → 続けて 2 秒以上長押し
- ロボット全面の緑の LED が点灯すれば起動完了

https://www.youtube.com/watch?v=m6-n51A3dao&list=PLJaMZYYjldgOS7IEZODioMkb_fMWphRoJ&index=2
注意点
- 起動時は上記の写真のようにダンピングモード(ロボットが伏せた状態)にしないと立ち上がりません。
- 通電後 1 分ほどは自己診断が走るので動かさないでください。 

シャットダウン – 必ずダンピングモードで行う
電源 OFF は起動手順と同じボタン操作ですが、姿勢に要注意。
必ず
- ダンピングモード(ロボットが伏せた状態)へ切り替え
- そのまま短押し → 長押しで電源 OFF
スマホアプリとの連携
ロボットを追加

アプリを起動し “Add Robot Dog” をタップ。近くの Go2 が自動検出されます。
機体を選択して名前を設定
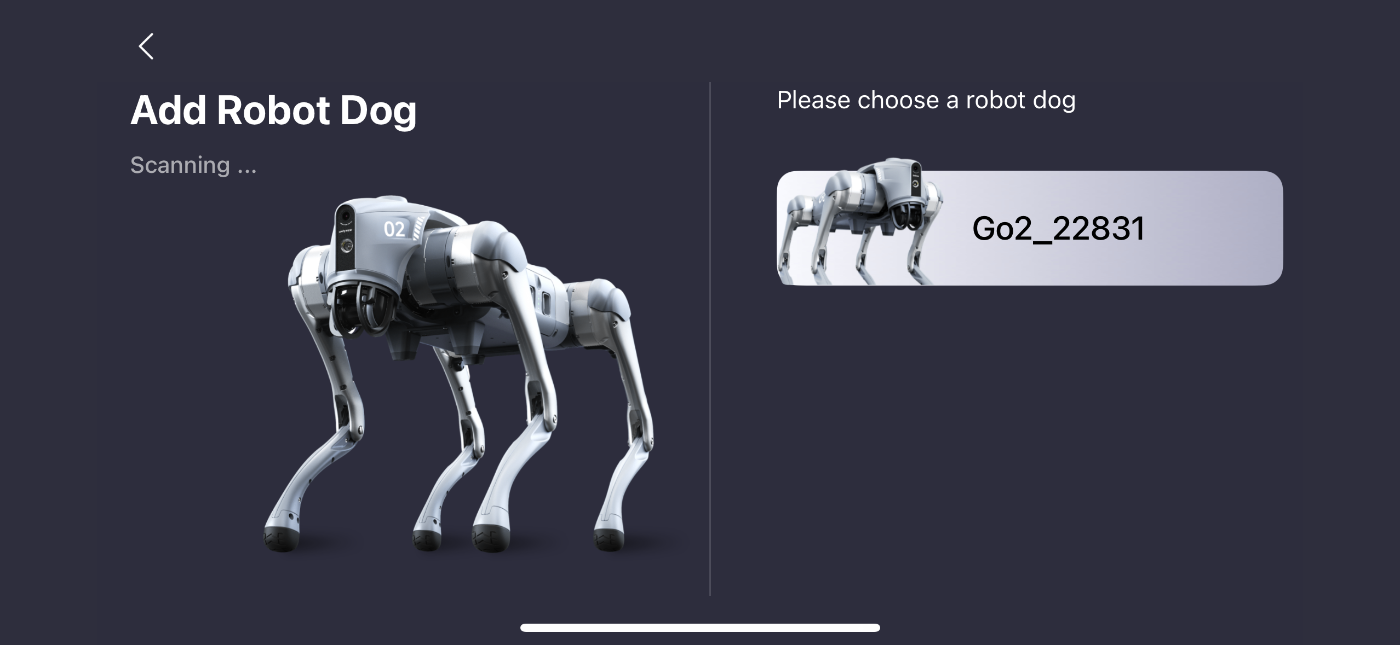

任意のニックネーム(例: SparkleDog)を入力し Bind を押すと登録完了です。
Wi-Fi モードで接続する

“Wi-Fi Mode” を選択すると、ロボットをルーター経由でクラウドに接続できます。

家庭やオフィスの SSID とパスワードを入力し Next。
接続完了を待つ
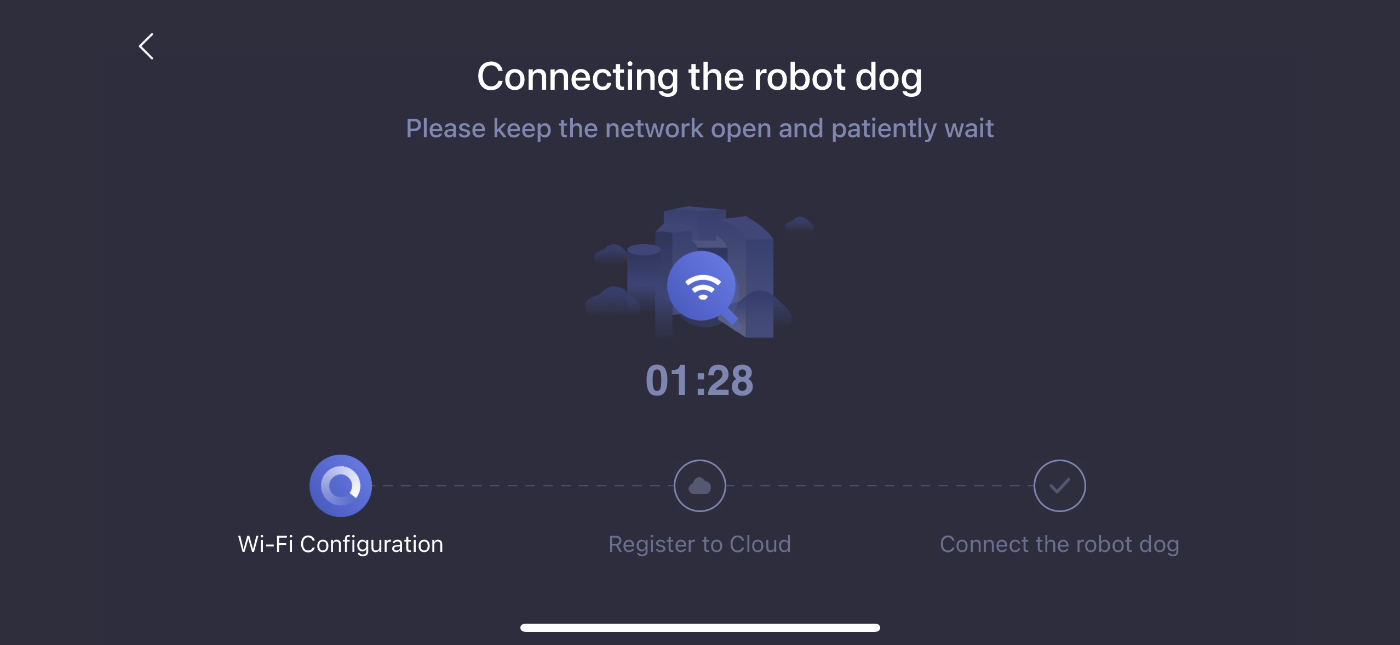

“Connection Successful” が表示されたら OK
ターミナル画面とコントローラーモード

接続直後はターミナル(状況モニター)画面が開きます。右下の “GO!” をタップするとリアルタイム操作 UI に切り替わり、カメラ映像+ LiDAR マップを見ながら移動命令が出せます。

動作映像
アプリ内に組み込まれた動きを実行してみました。
電源を切る前のアンバインド手順

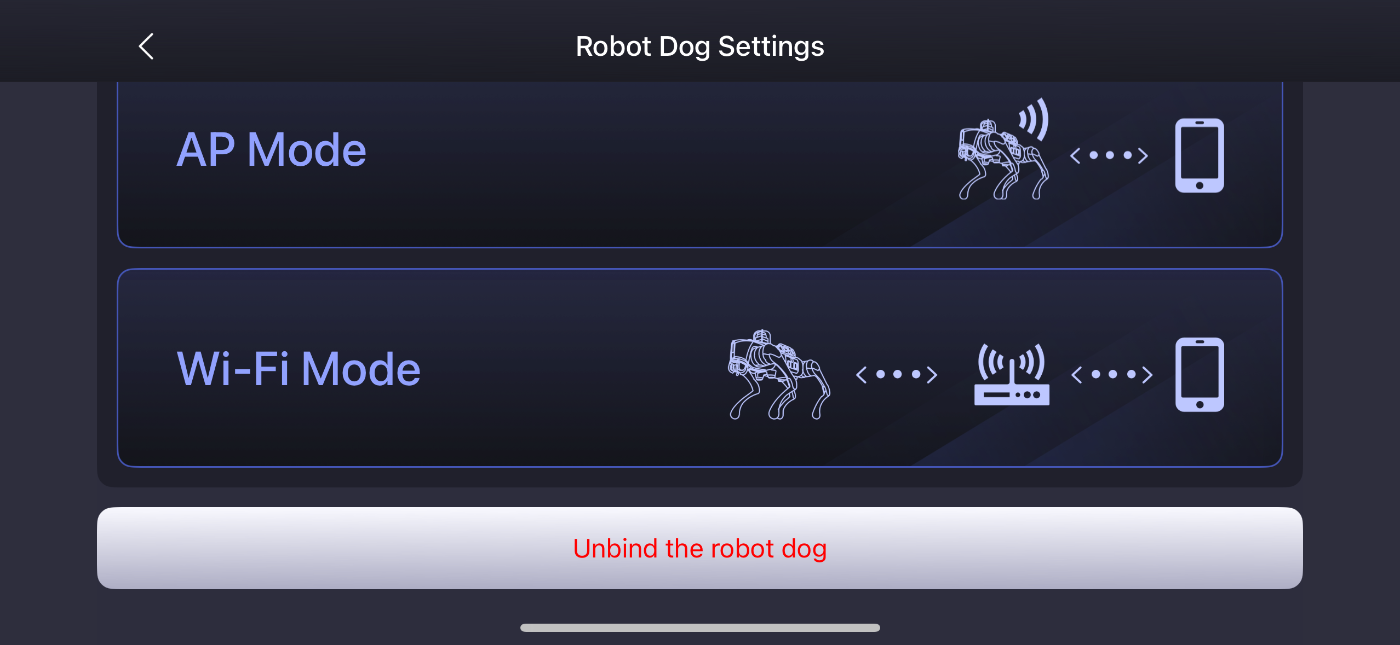
スマホと Go2 は 1 対 1 のペアでしか動作しません。別の端末で操作したい場合や完全に電源を落とす前には
- Device → Robot Dog Setting
- 最下部の “Unbind the robot dog” をタップ
これを忘れると別端末からの再接続に失敗することがあるらしいので注意です。 
Joystick コントローラーとペアリング

https://physical-computing-lab.net/wp-content/uploads/Go2-Handheld-Remote-Control.pdf
- コントローラー側の電源ボタンを短押し → 続けて 2 秒以上長押し
- アプリ側で Device → Remote Controlのremote control ID にコントローラーに記載されている番号を入力して接続完了
ジョイスティックはアプリより低遅延で、精密な旋回やトリック動作がしやすくなります。
ジョイスティックドキュメント – PhysicalComputingLab by TechShare
https://physical-computing-lab.net/wp-content/uploads/Go2-Handheld-Remote-Control.pdf
まとめ
- まずバッテリーを充電してから起動
- 正しい姿勢で電源 ON/OFF することに注意
- アプリとの連携
- 動作テストには Joystick が便利
この記事を参考に、ぜひ Go2 とのロボットライフを安全かつ快適にスタートしてください!
参考
公式動画再生リスト Go2 ドキュメント – PhysicalComputingLab by TechShare バッテリードキュメント – PhysicalComputingLab by TechShare ジョイスティックドキュメント – PhysicalComputingLab by TechShare TechShare さんの UniTree Go2 解説スライド

Sparkle AI株式会社は、株式会社ファブリカホールディングスの一員として、AIとWeb3技術を駆使した最先端のプロダクト・ソリューション開発をしています。私たちは、未来を見据えた革新的なアイデアを形にし、"明日の必需品"をいち早く社会に届けることをミッションとしています。共に未来を作っていく仲間を募集しています!
Discussion