NVIDIA Isaac Sim: ROS Navigationの使用(複数ロボット)
概要
Isaac Sim上でSceneと複数のRobotを配置し、ROS Nvigation Stackを用いてRobotを動かします。
Issac Simのtutorialに上記の内容が記載されており、この内容に沿って進めます。
実行環境
- インストール実行環境
| unit | specification |
|---|---|
| CPU | i9-11900H |
| GPU | GeForce RTX 3080 Laptop |
| RAM | 32GB |
| OS | Ubuntu 20.04.3 LTS |
- Nvidia Driverバージョン
- 510.39.01
- Issac simバージョン
- 2021.2.1
手順
Isaac Sim上でSceneと複数のRobotを配置し、ROS Nvigation Stackを用いてRobotを動かします。
まず、ROS Nvigation Stack上で使用するOccupacy MapをIssac Sim上で作成します。
作成したOccupacy Mapを用いて、Navigationを実行します。
- ROS Navigationのインストール
- Occupacy Mapの生成
- Navigationの実行
1. ROS Navigationのインストール
1.1 ROS Navigationをインストールする
terminalで次のコマンドを実行します。
$ sudo apt-get install -y ros-noetic-navigation
2. Occupacy Mapの生成
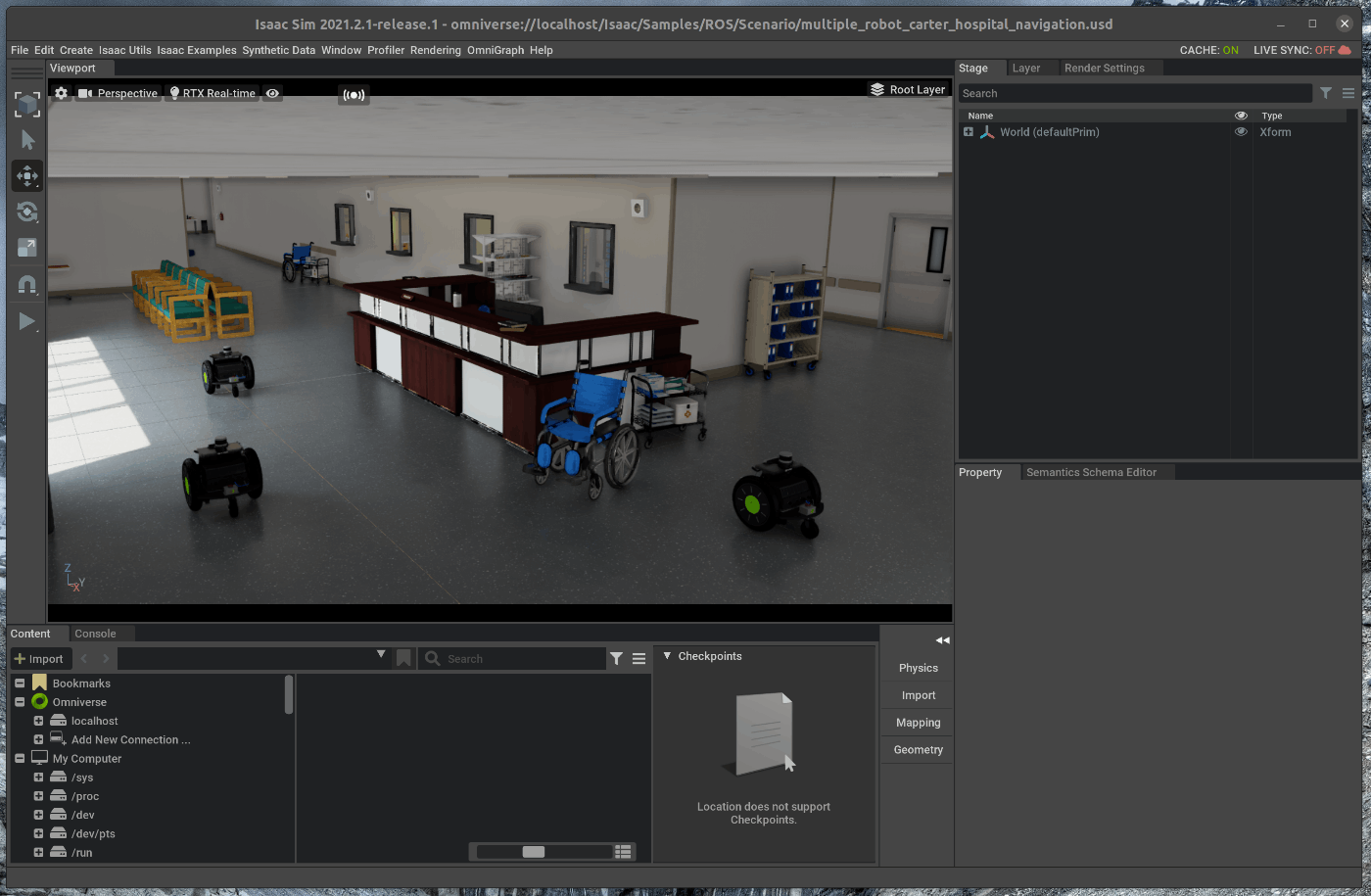
2.1 OmniverseからIssac Simを起動する

2.2 シーンをロードする
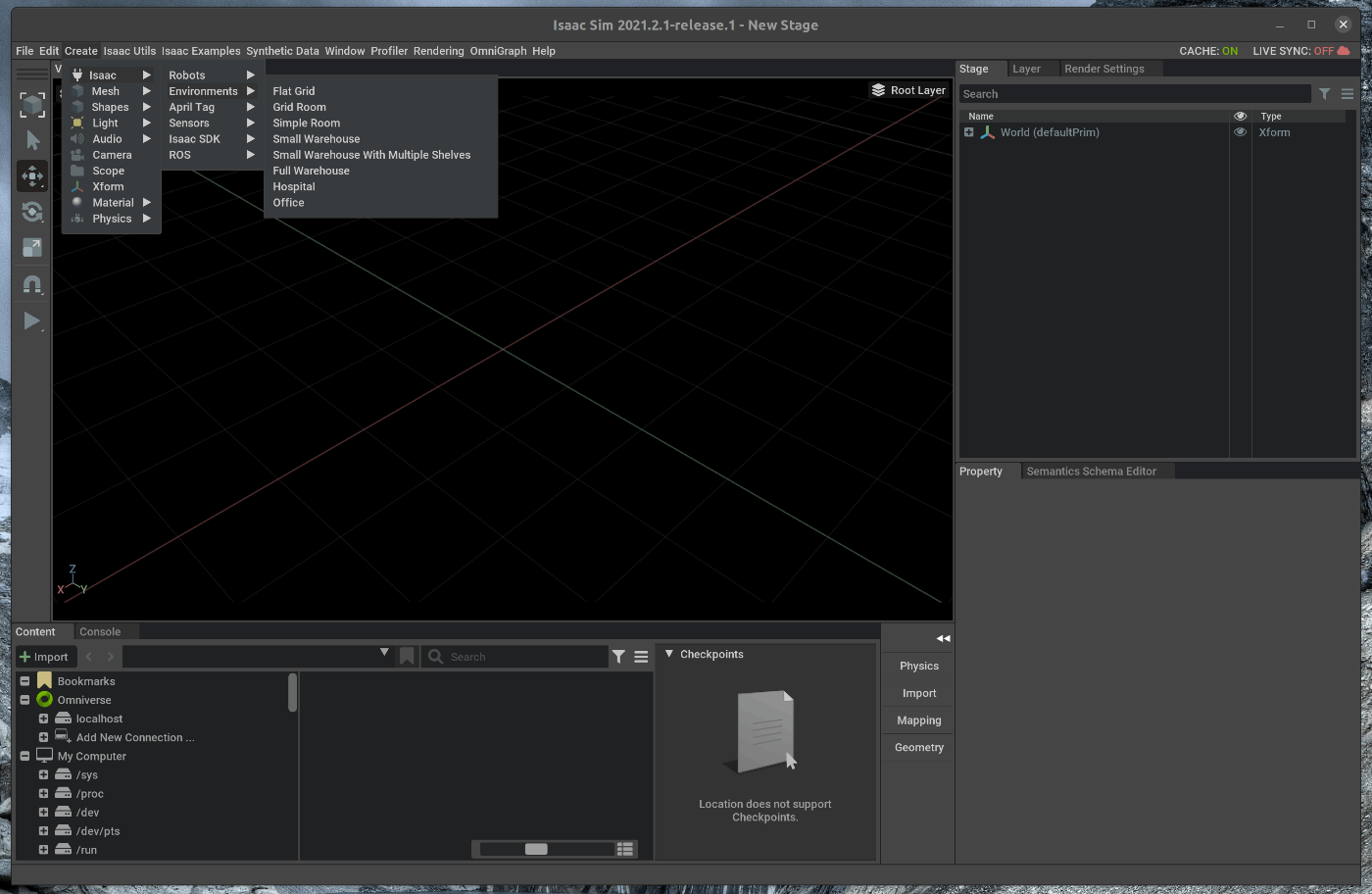
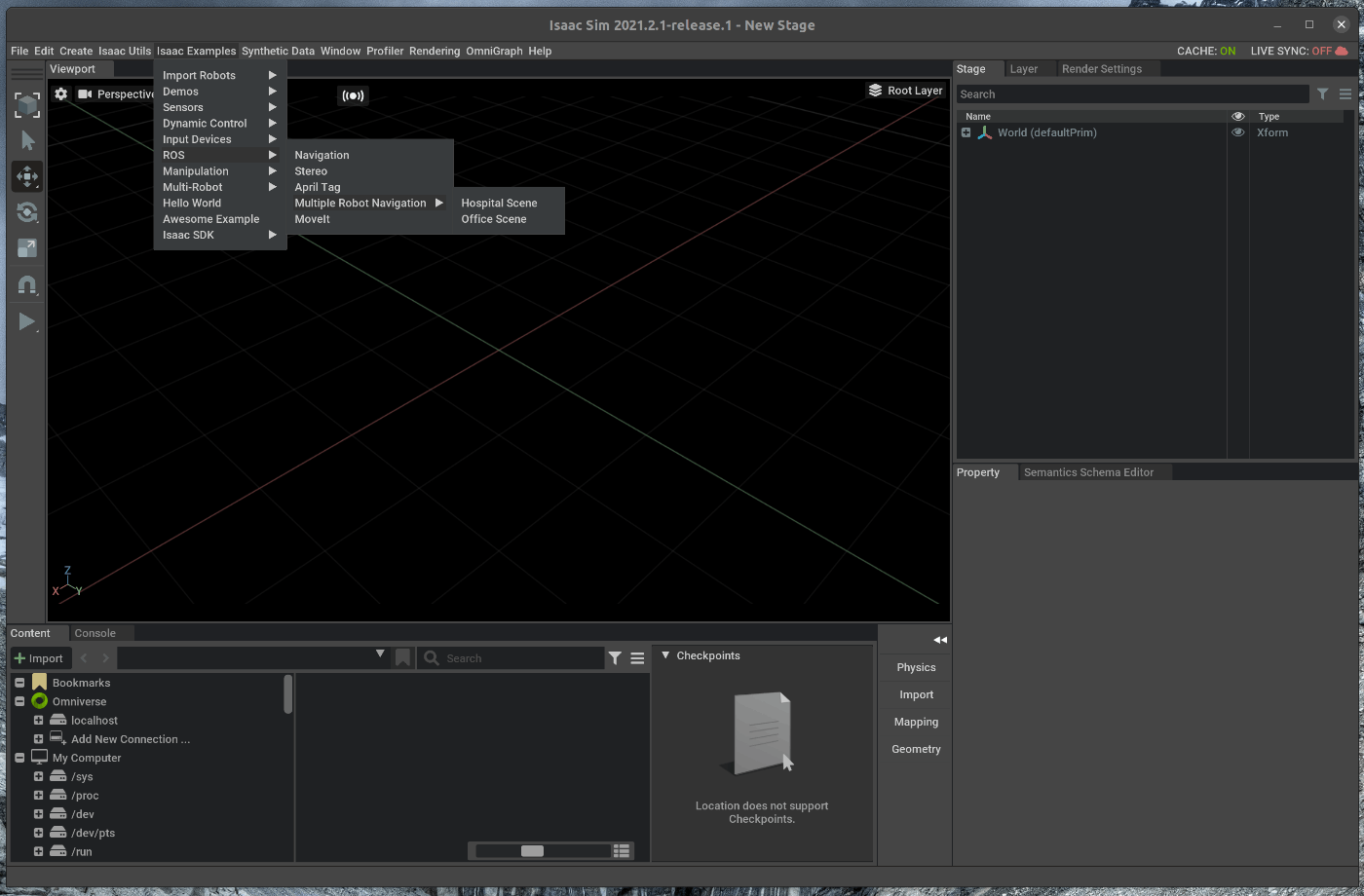
メニューバーのIsaac Examples > ROS > Navigation > Hospitalを選択します。
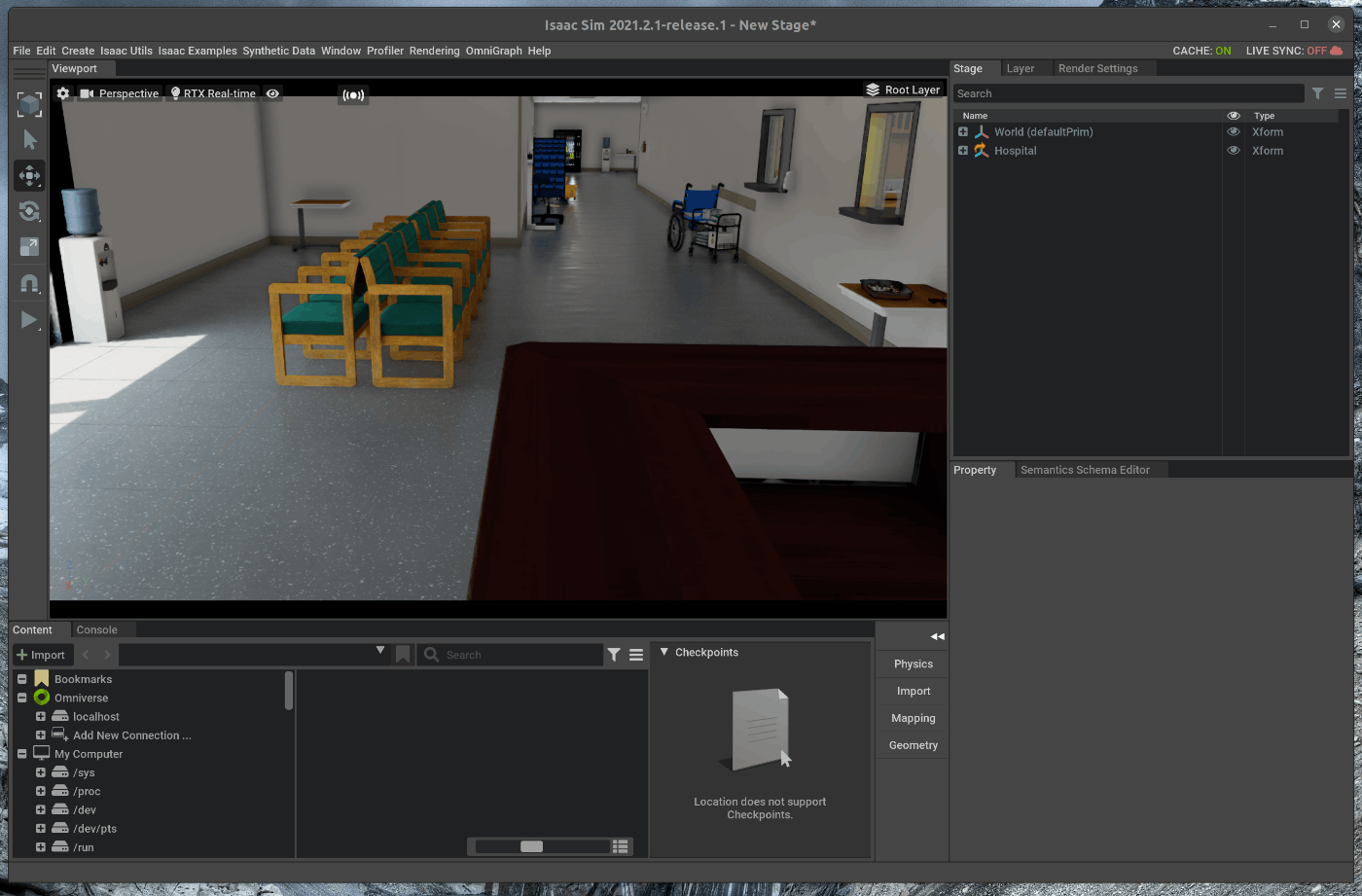
この状態で、Viewportの左側のPLAYボタンを押します。
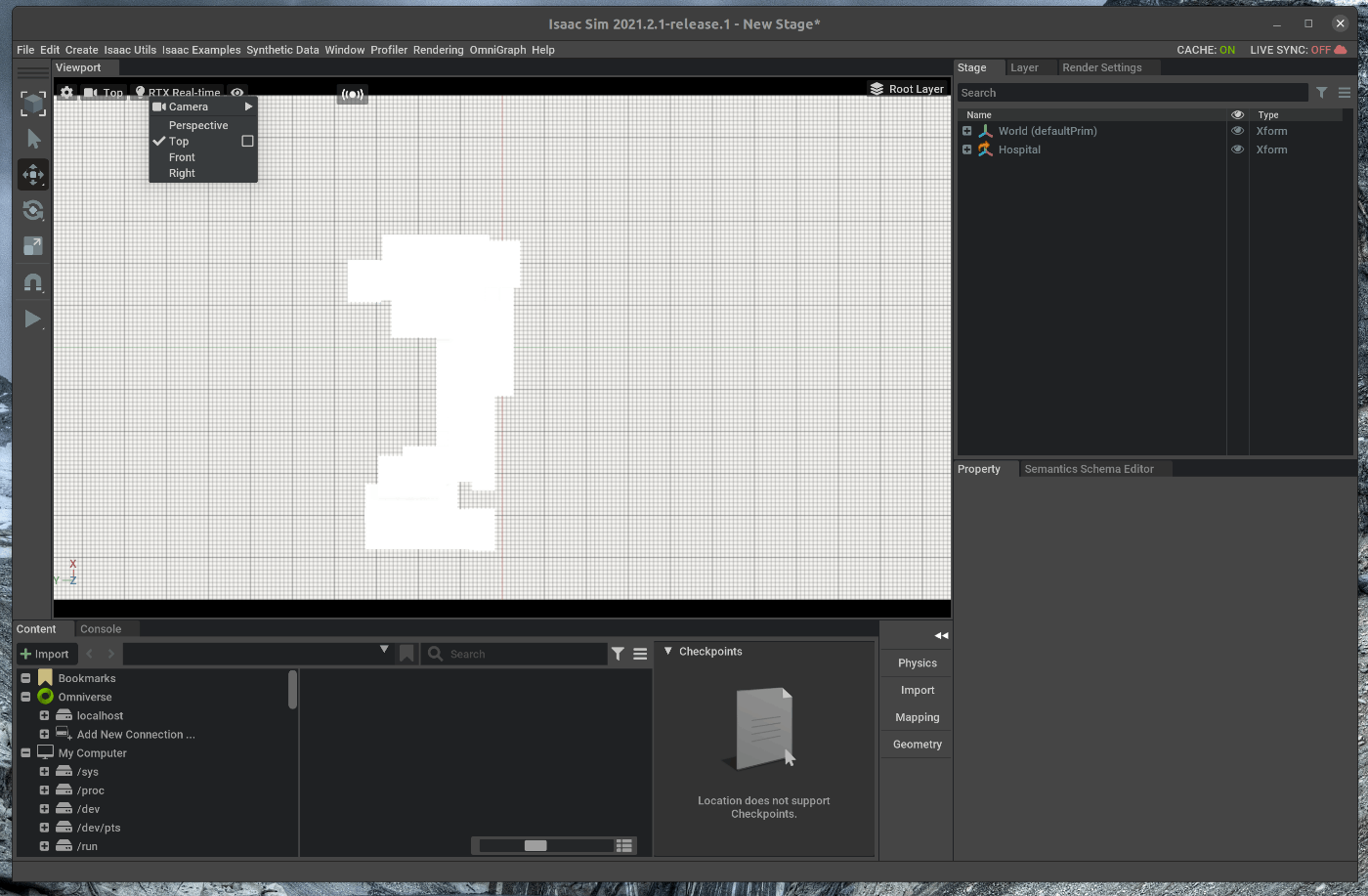
viewportのカメラアイコンをクリックし、Perspectiveを選択します。
また、ドロップダウンしたメニューの中から”Top”を選択します。
2.3 Occupacy Mapを生成する
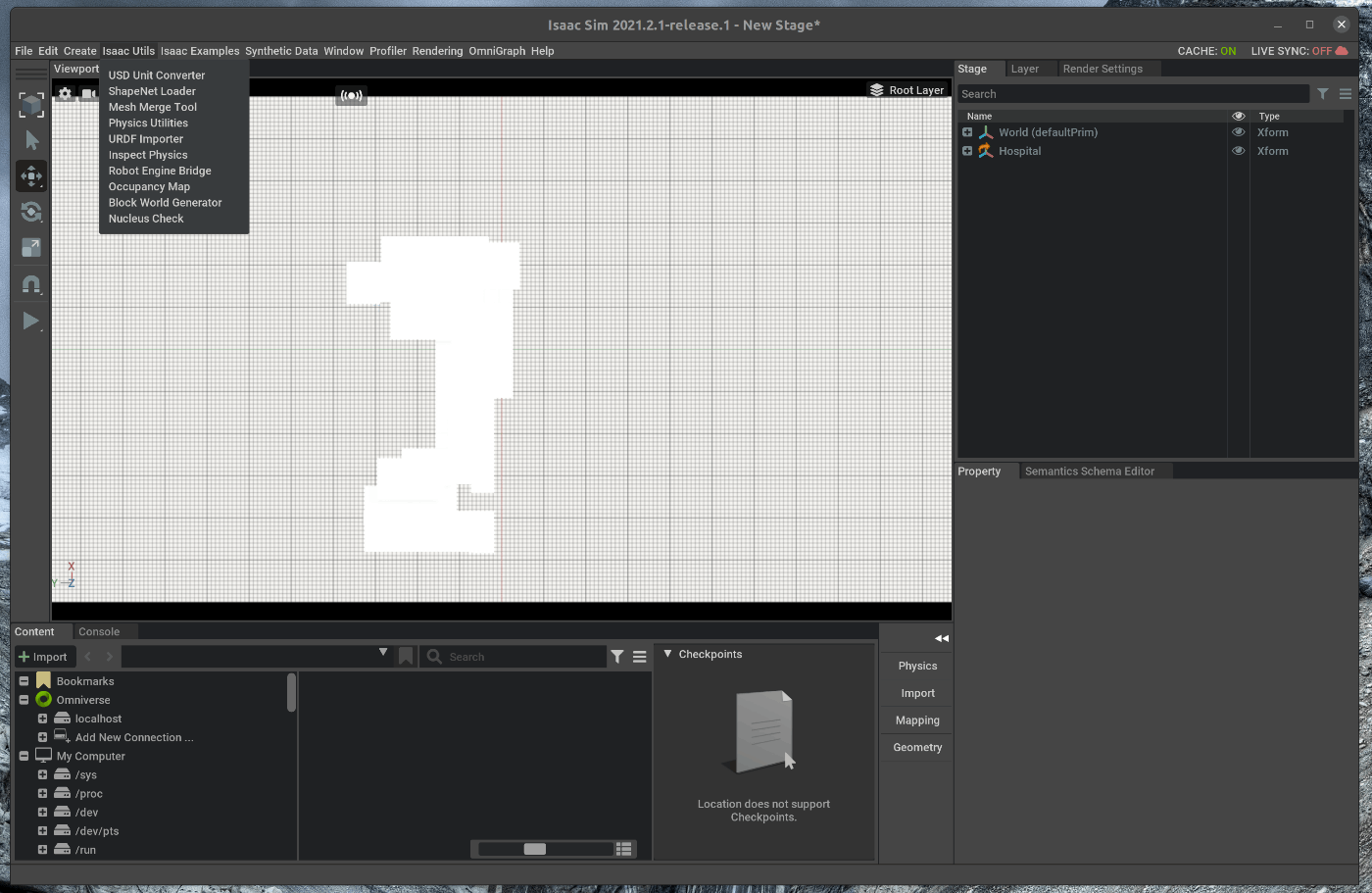
メニューバーのIsaac Utils > Occupancy Mapを選択します。
ポップアップしたWindowをViwport下部にあるConsoleの右隣にドラッグし、追加します。
Occupacy Mapの設定を次の通りに変更します。
- originのXを0.0にする
- originのYを0.0にする
- originのZを0.0にする
- Lower BpundのZを10.0にする
- Upprer BoundのZを62.0にする
右側のStage上で、Hospitalを選択します。

この状態で、Occupacy Mapの”BOUND SELECTION”をクリックします。
クリックすると、map parametersがHospitalに合うようにアップデートされます。
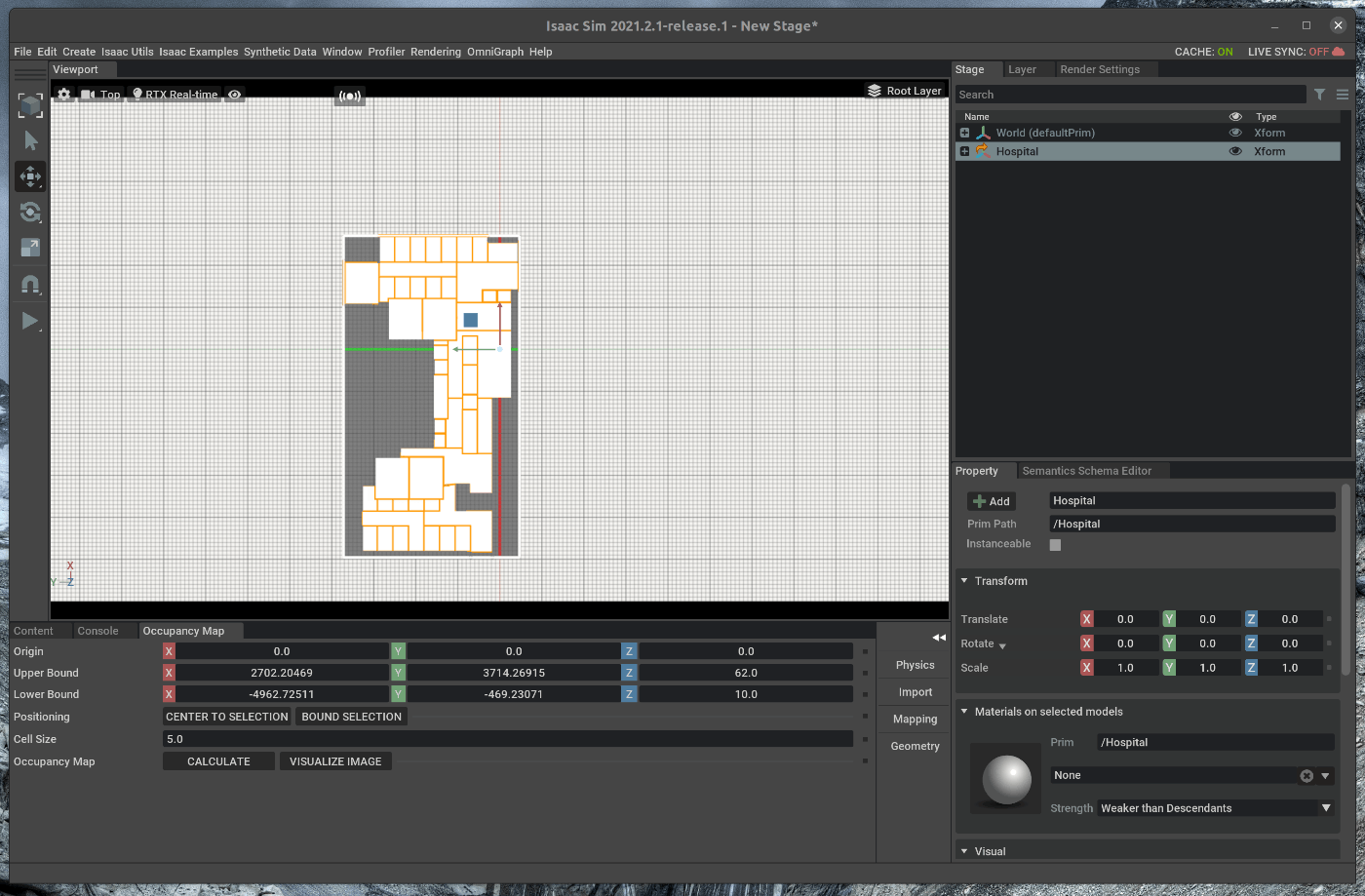
次に、Occupacy Mapの”CALCULATE” > "VISUALIZE IMAG"をクリックします。
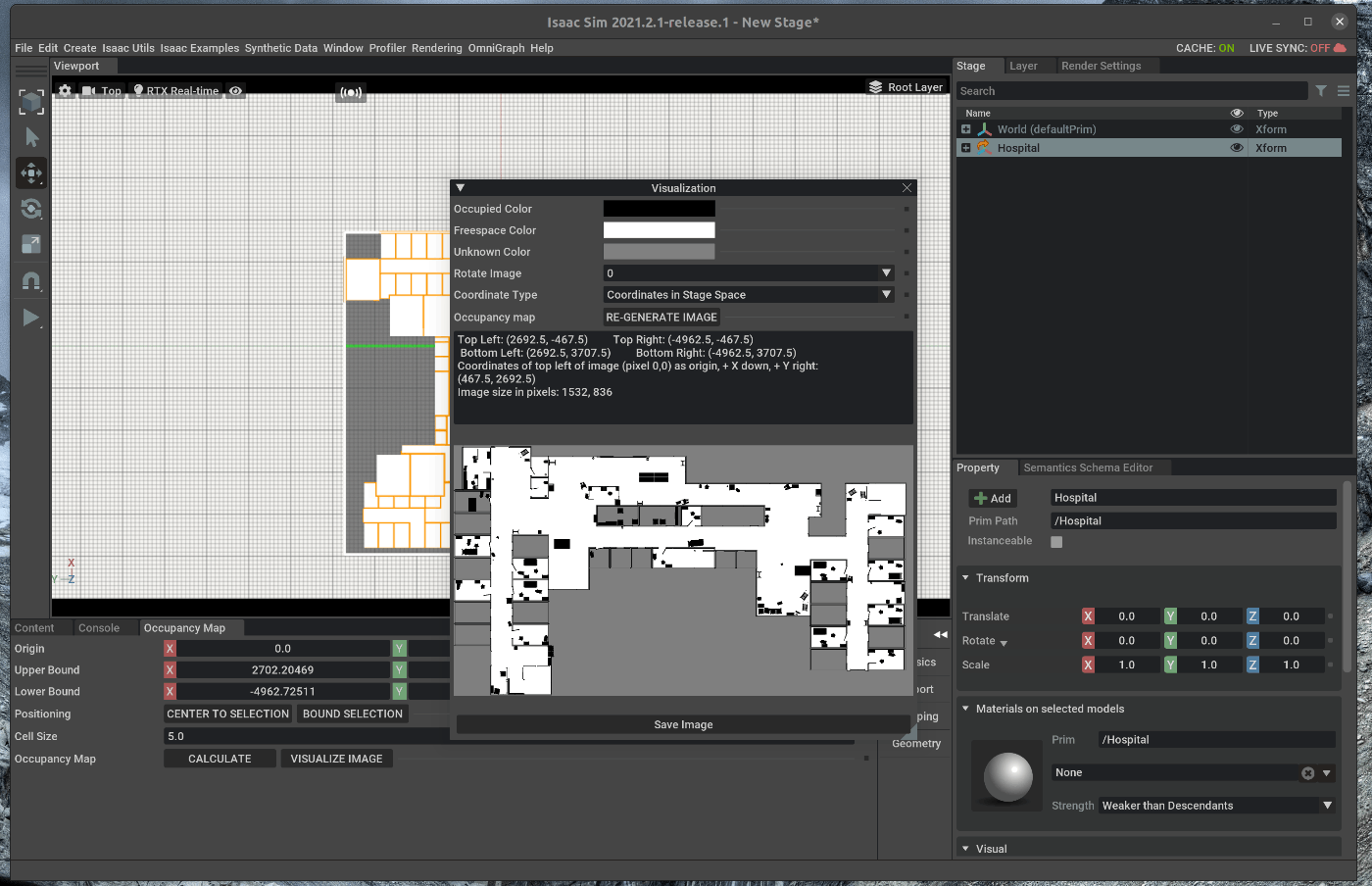
表示されたOccupacy MapのWindowの中で次の設定を変更します。
- rotationを180にする
- Coordinate Typeを”ROS Occupancy Map Parameters File (YAML)”にする
設定後、Occupacy Mapの”RE-GENERATE IMAGE”を選択する。
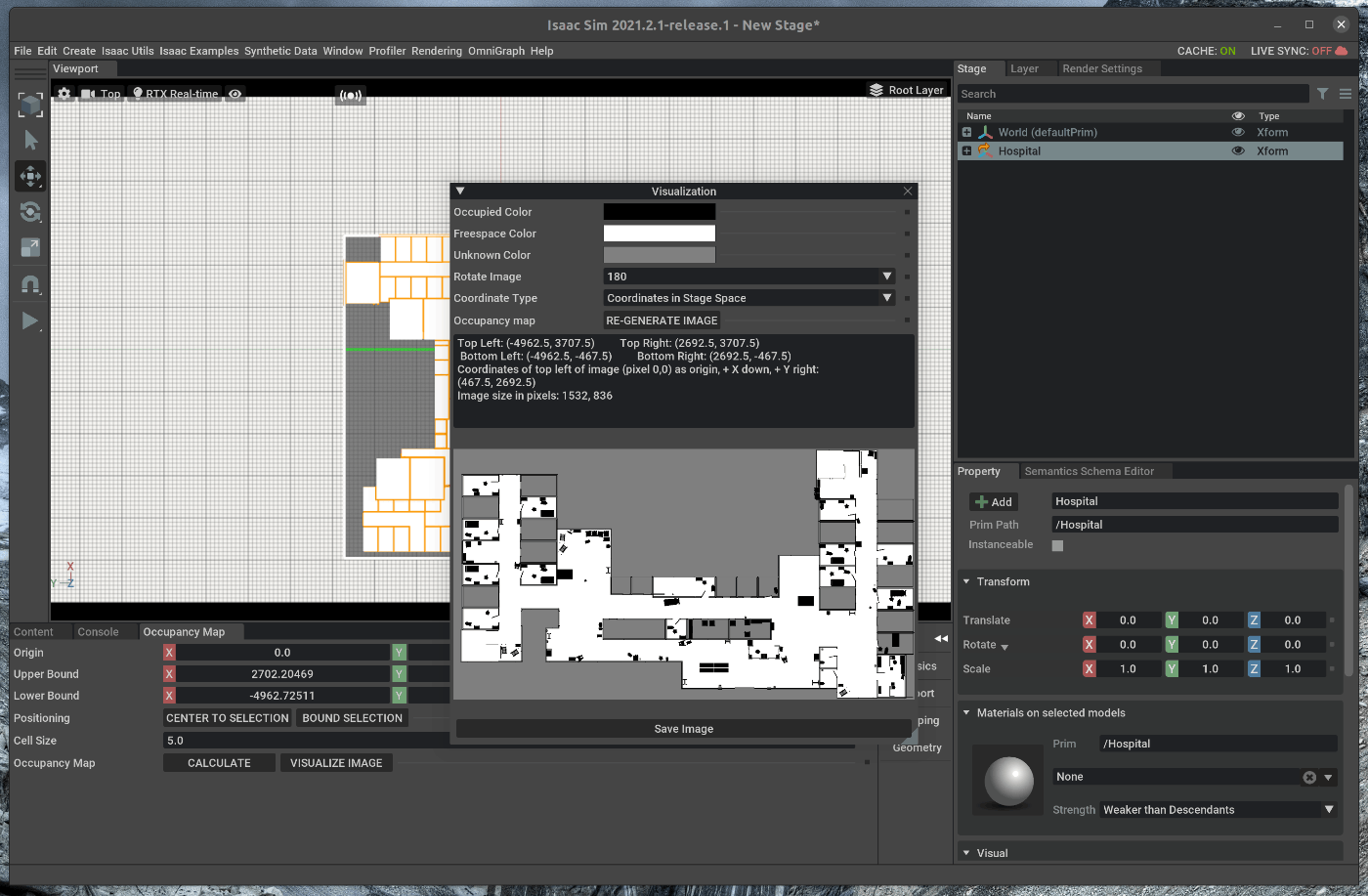
生成したImage(Occupacy Map)を保存します。
Imageの保存名は”carter_hospital_navigation.yaml”に設定します。
この状態で、Viewportの左側のSTOPボタンを押します。
3. Navigationの実行
3.1 シーンをロードする
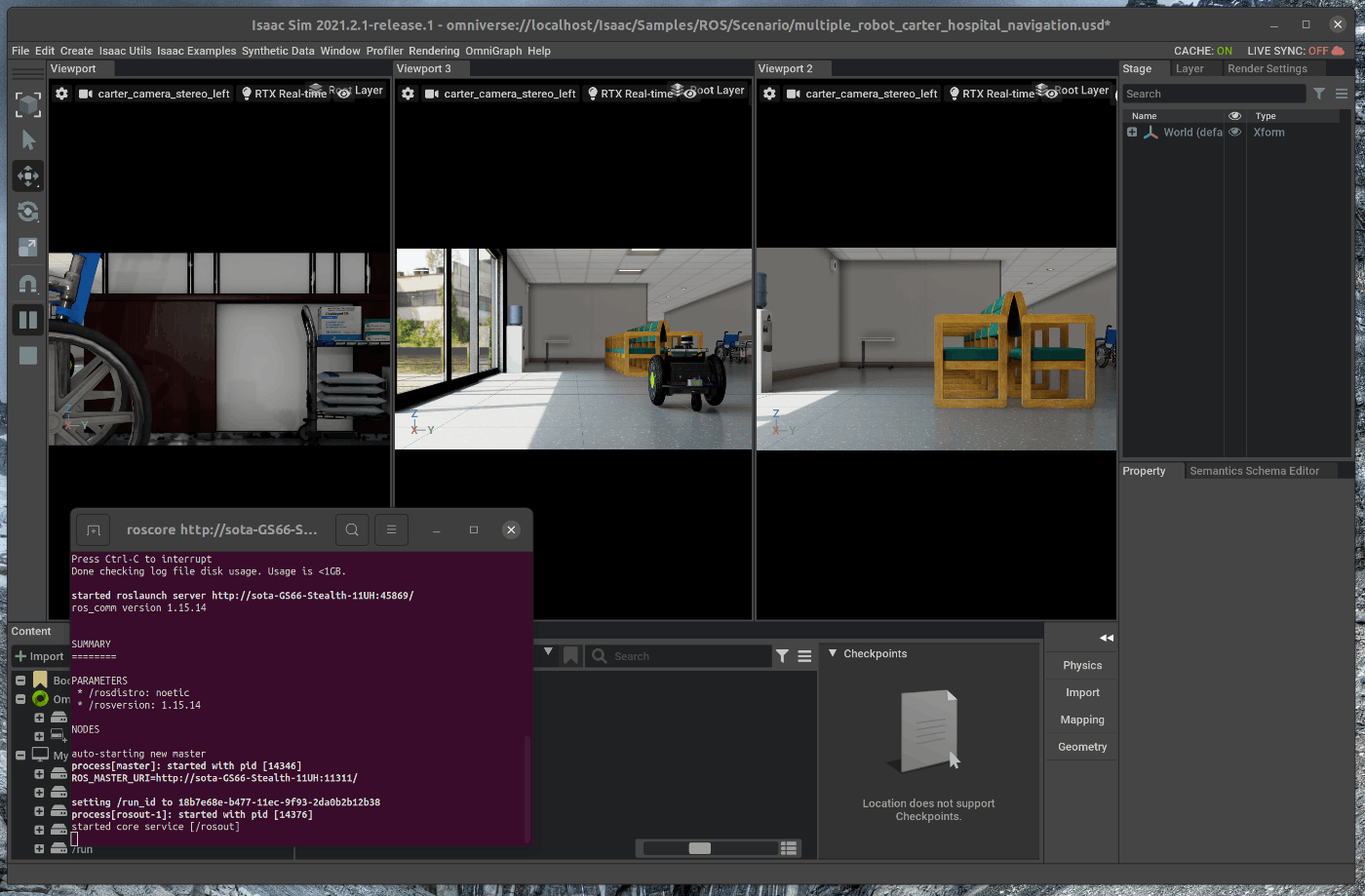
メニューバーのIsaac Examples > ROS > Multi Robot Navigation > Hospitalを選択します。
新たにterminalを開き、roscoreを起動します。
この状態で、Viewportの左側のPLAYボタンを押します。
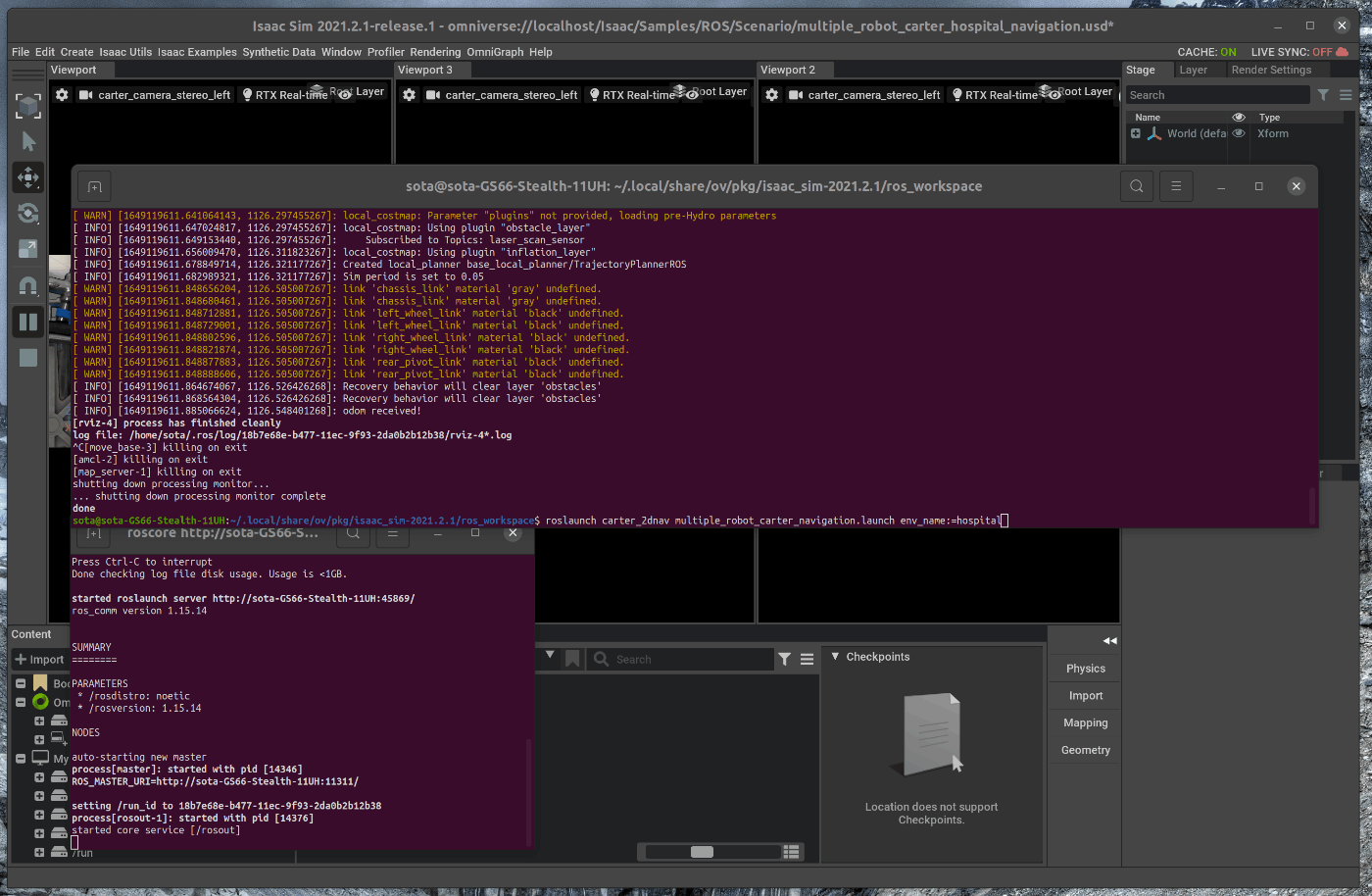
3.2 NavigationのLaunchを実行する
新たにterminalを開き、次のコマンドを入力します
$ cd ~/.local/share/ov/pkg/isaac_sim-2021.2.1/ros_workspace/
$ source devel/setup.bash
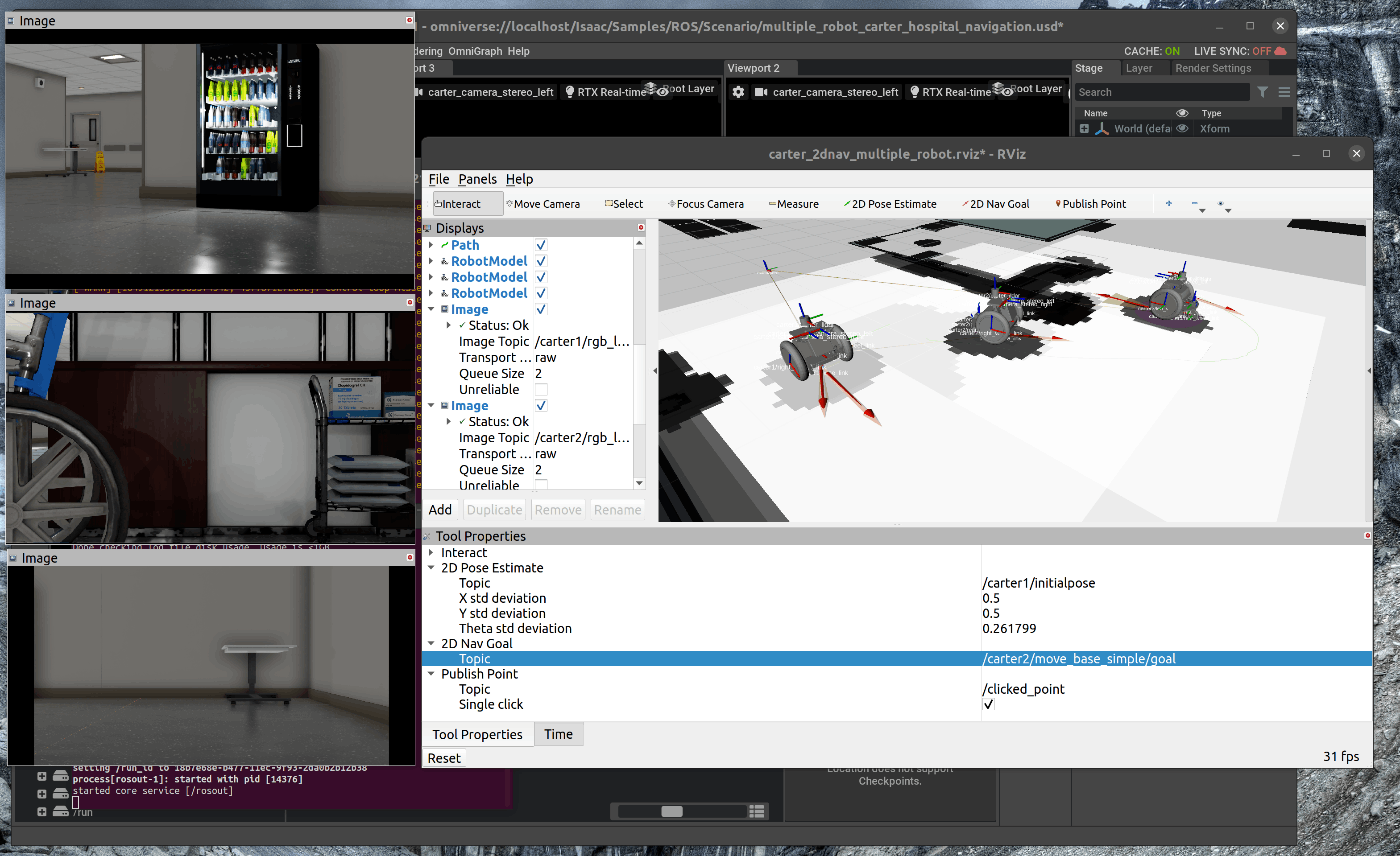
$ roslaunch carter_2dnav multiple_robot_carter_navigation.launch env_name:=hospital
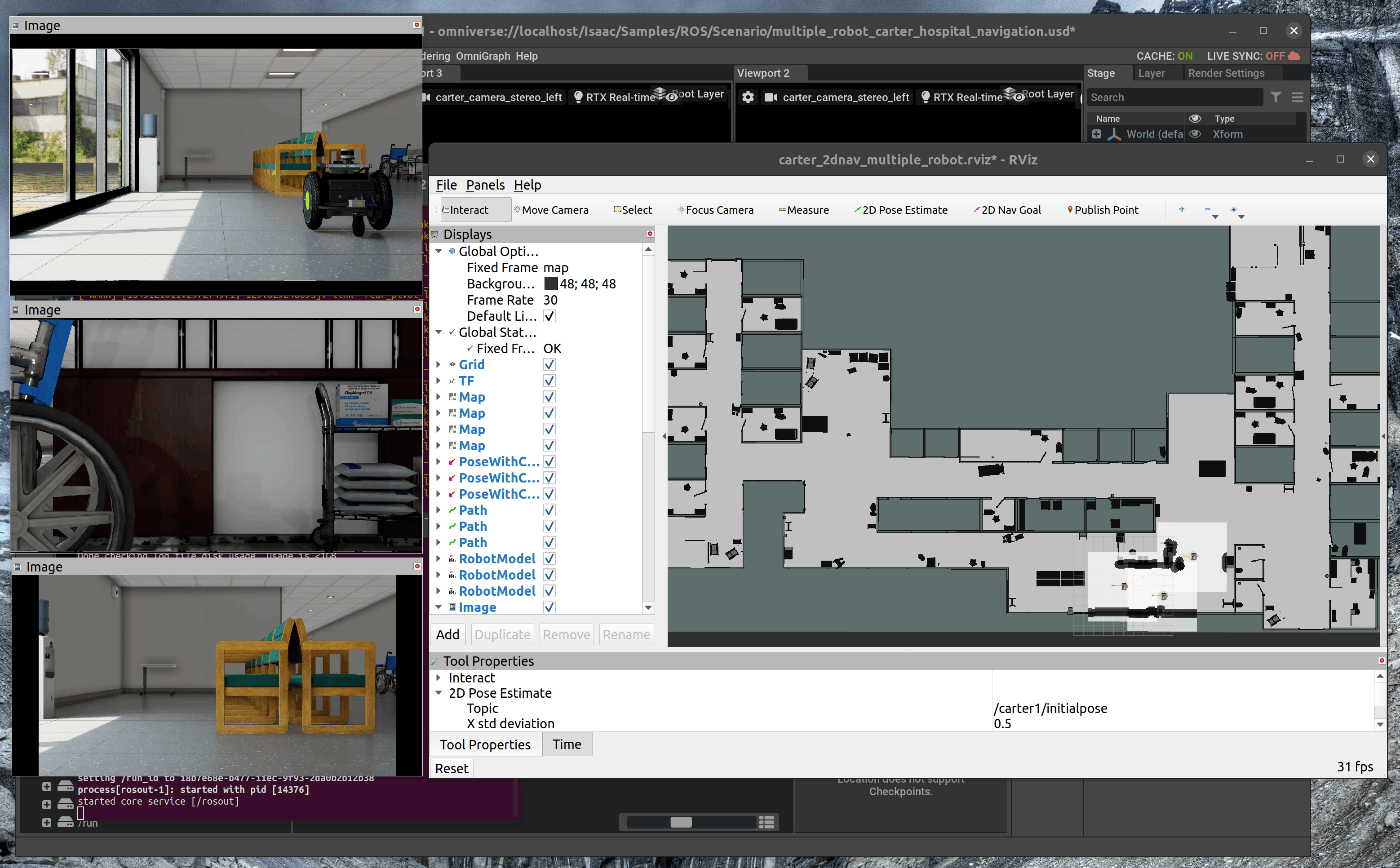
rviz上で2D Nav Goalを使用することにより、ロボットが動作することを確認できます。
Discussion