NVIDIA Isaac Sim: インタラクティブデモの実行
概要
インタラクティブに操作可能なロボットのデモを動かします。
Issac SimのExtension部分に上記の内容が記載されており、この内容に沿って進めます。
実行環境
- インストール実行環境
| unit | specification |
|---|---|
| CPU | i9-11900H |
| GPU | GeForce RTX 3080 Laptop |
| RAM | 32GB |
| OS | Ubuntu 20.04.3 LTS |
- Nvidia Driverバージョン
- 510.39.01
- Issac simバージョン
- 2021.2.1
手順
Insaac simにはインタラクティブに操作可能なデモが、3つ含まれています。
今回はこの3つのデモをそれぞれ実行します。
- Leonardoを用いたデモの実行
- UR10を用いたデモの実行
- Navigationデモの実行
1. Leonardoを用いたデモの実行
このデモでは、マニピュレータがシーン内のトイブロックをスタックするタスクを実行します。
1.1 OmniverseからIssac Simを起動する

1.2 シーンをロードする
メニューバーのIsaac Examples > Demos > Leonardo Demoを選択します。

次にポップアップしたWindowにおいて、”Create Scenario”を選択します。
選択すると、ロボットが読み込まれます。


読み込みの完了後、右側のツールバーの中のPlayボタンを選択し、シミュレーションを開始します。

1.3 デモを実行する
ポップアップしたウィンドウにおいて、”Perform Task”を選択します。
選択すると、タスクが実行されます。


また、”Togggle Obstacle”を選択し、キューブをシーン内で移動させると、キューブを避けるようにマニピュレータの軌道が計算されます。
2. UR10を用いたデモの実行
UR10を用いたデモは2つ用意されています。
一つは、UR10の手先に取り付けられているSuction Gripperでコンテナを持ち、そのコンテナの中ににランダムにオブジェクトを落下させるデモ(Bin fillデモ)です、
もう一つは、UR10を用いたパレタイジングのデモ(Stack binデモ)です。
2.1 Bin fillデモを実行する
2.1.1 シーンをロードする
メニューバーのIsaac Examples > Demos > UR10 Palletizingを選択します。
次にポップアップしたWindowにおいて、”Selected Scenario”の欄をクリックし、”fill bin”を選択します。

選択後、同様のWindowにおいて、”Create Scenario”を選択します。
選択すると、ロボットが読み込まれます。

読み込みの完了後、右側のツールバーの中のPlayボタンを選択し、シミュレーションを開始します。

2.1.2 デモを実行する
ポップアップしたウィンドウにおいて、”Perform Task”を選択します。
選択すると、タスクが実行されます。

2.2 Stack binデモを実行する
2.2.1 シーンをロードする
メニューバーのIsaac Examples -> Demos -> UR10 Palletizingを選択します。
次にポップアップしたWindowにおいて、”Selected Scenario”の欄をクリックし、”Stack bin”を選択します。

選択後、同様のWindowにおいて、”Create Scenario”を選択します。
選択すると、ロボットが読み込まれます。

読み込みの完了後、右側のツールバーの中のPlayボタンを選択し、シミュレーションを開始します。

2.2.2 デモを実行する
ポップアップしたウィンドウにおいて、”Perform Task”を選択します。
選択すると、タスクが実行されます。



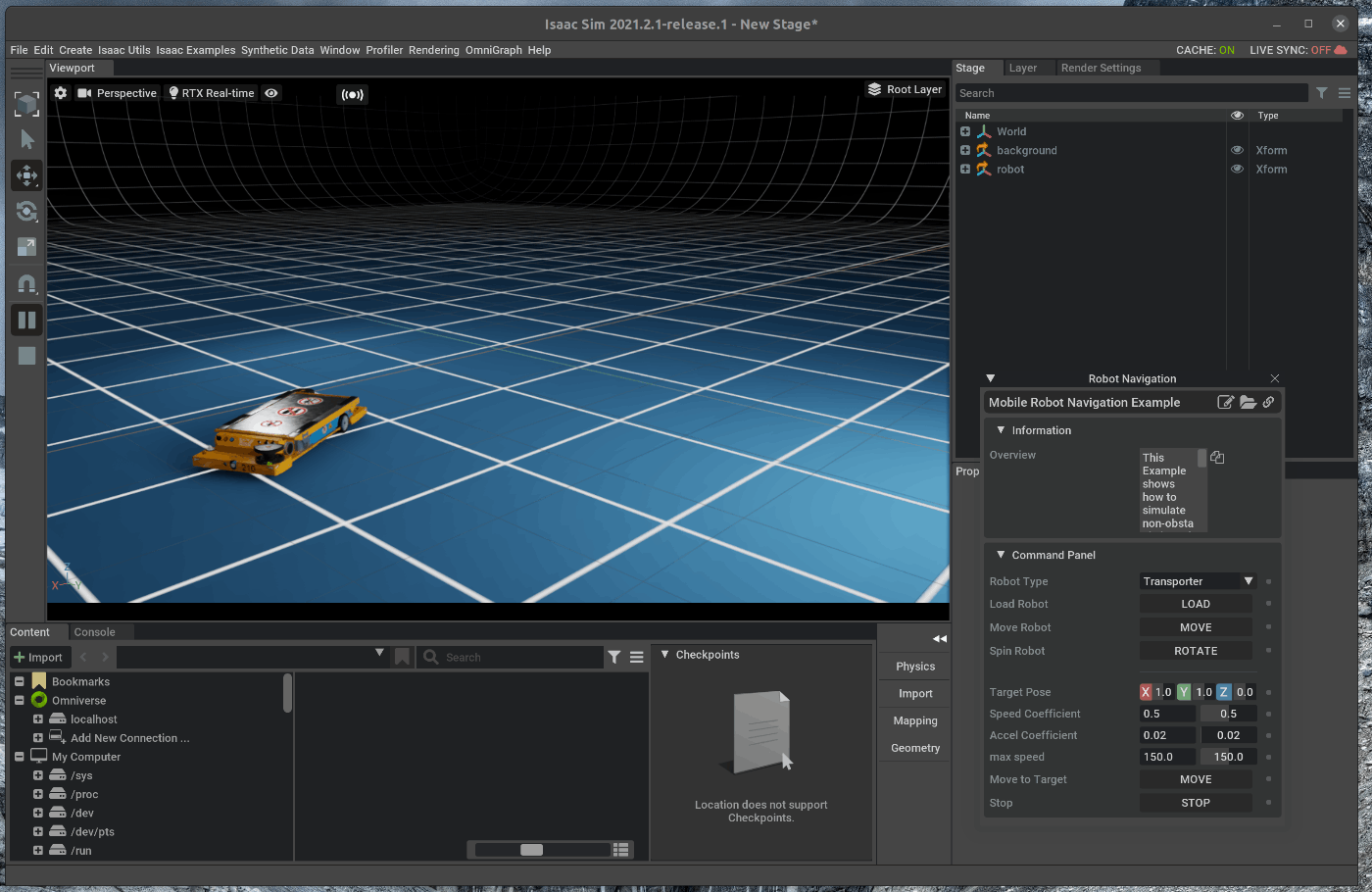
3. Navigationデモの実行
このデモでは、AGVを使用します。
AGVの目標位置、目標姿勢を登録すると、その位置に向かってAGVが移動します。
3.1 シーンをロードする
メニューバーのIsaac Examples > Demos > Robot Navigationを選択します。
次にポップアップしたWindowにおいて、”Load”を選択します。

選択すると、ロボットが読み込まれます。

”Robot Type”をCarterに変更すると、Carterがロードされます。

ポップアップしたウィンドウにおいて、”Open Source Code”をクリックすると、ExampleのソースコードがVscode上に展開されます。
読み込みの完了後、右側のツールバーの中のPlayボタンを選択し、シミュレーションを開始します。
3.2 デモを実行する
ポップアップしたウィンドウにおいて、”Move Robot"の”Move”を選択すると、ロボットが前進します。また、"Spin Robot"の”Rotate”を選択すると、ロボットが回転します。
移動後、”target Pose"に値を入力し、"Move to Target"の”Move”を選択すると、ロボットが設定したTarget poseに移動します。
Robot TypeをCarterに設定し、ロードした場合でも、同様にNavigationは実行可能です。


Discussion