NVIDIA Isaac Sim: Script Editorによるシーン操作(GUI)
概要
PythonのAPIからシーンを操作します。
Isaac Simのtutorialに上記の内容が記載されており、この内容に沿って進めます。
2023/07/29 更新内容
- Script Editorのtutorialのリンクが古くなっていることをご指摘頂いた
- 更新前のリンクは404が返ってきてしまう
- リンクを更新
実行環境
- インストール実行環境
| unit | specification |
|---|---|
| CPU | i9-11900H |
| GPU | GeForce RTX 3080 Laptop |
| RAM | 32GB |
| OS | Ubuntu 20.04.3 LTS |
- Nvidia Driverバージョン
- 510.39.01
- Issac simバージョン
- 2021.2.1
概要
GUIでの操作はすべてPythonのAPIから操作することが可能です。
(逆にPython APIからのすべての操作がGUI上から実行できるわけではない為。注意します)
issac Sim上でのPython APIは、Omniverse USD APIとIssac Sim core APIが用意されています。
今回は、2つのAPIを用いて、シーン内に立方体を追加します。
- GUI内にScript Editorを追加
- USD APIでシーンを操作
- Issac Sim Core APIでシーンを操作
1. GUI内にScript Editorを追加
こちらのページに記載してある手順を進めます。
1.1 OmniverseからIssac Simを起動する

1.2 Script Editorを追加
メニューバーのWindow > Script Editpを選択します。
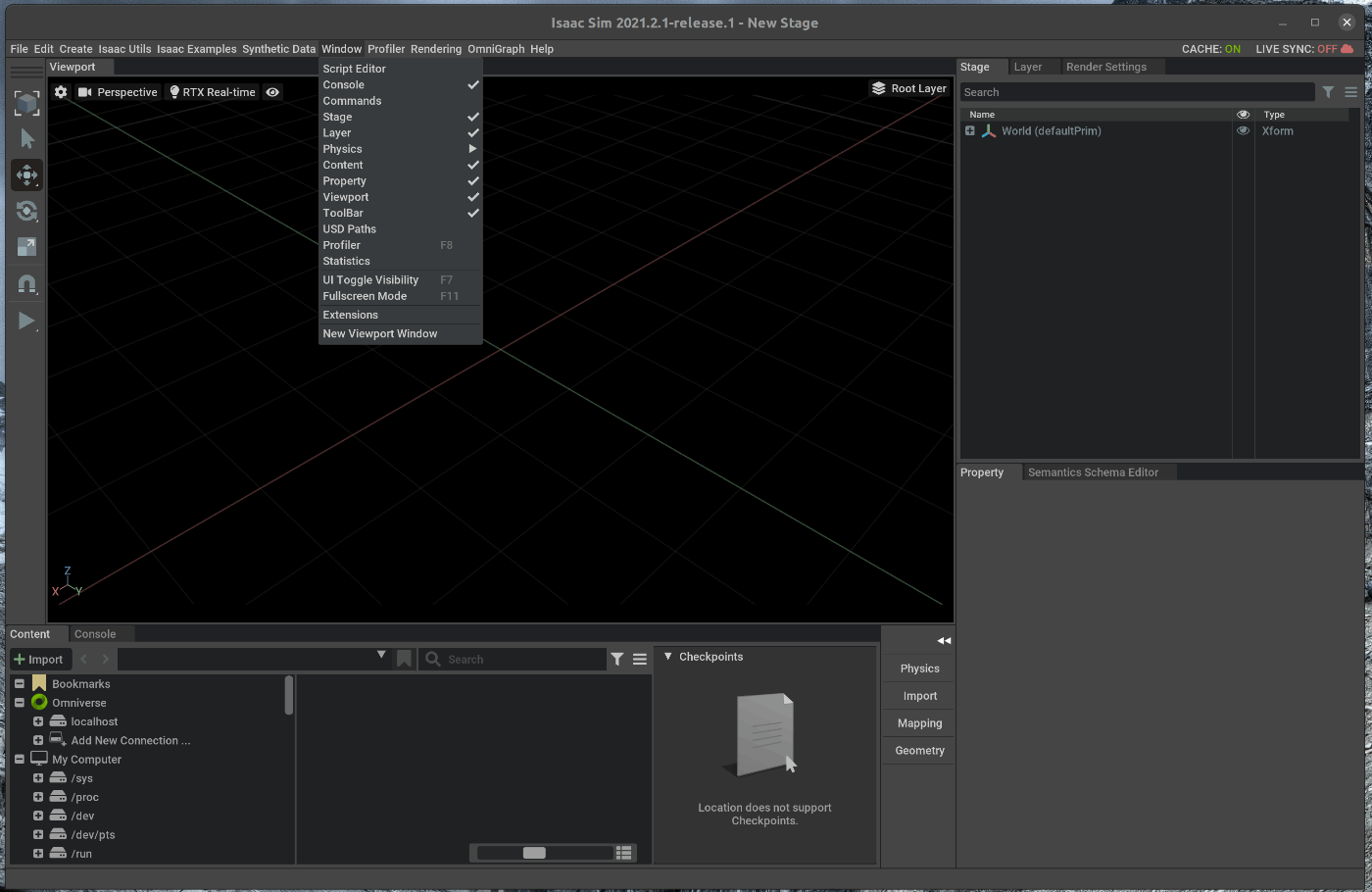
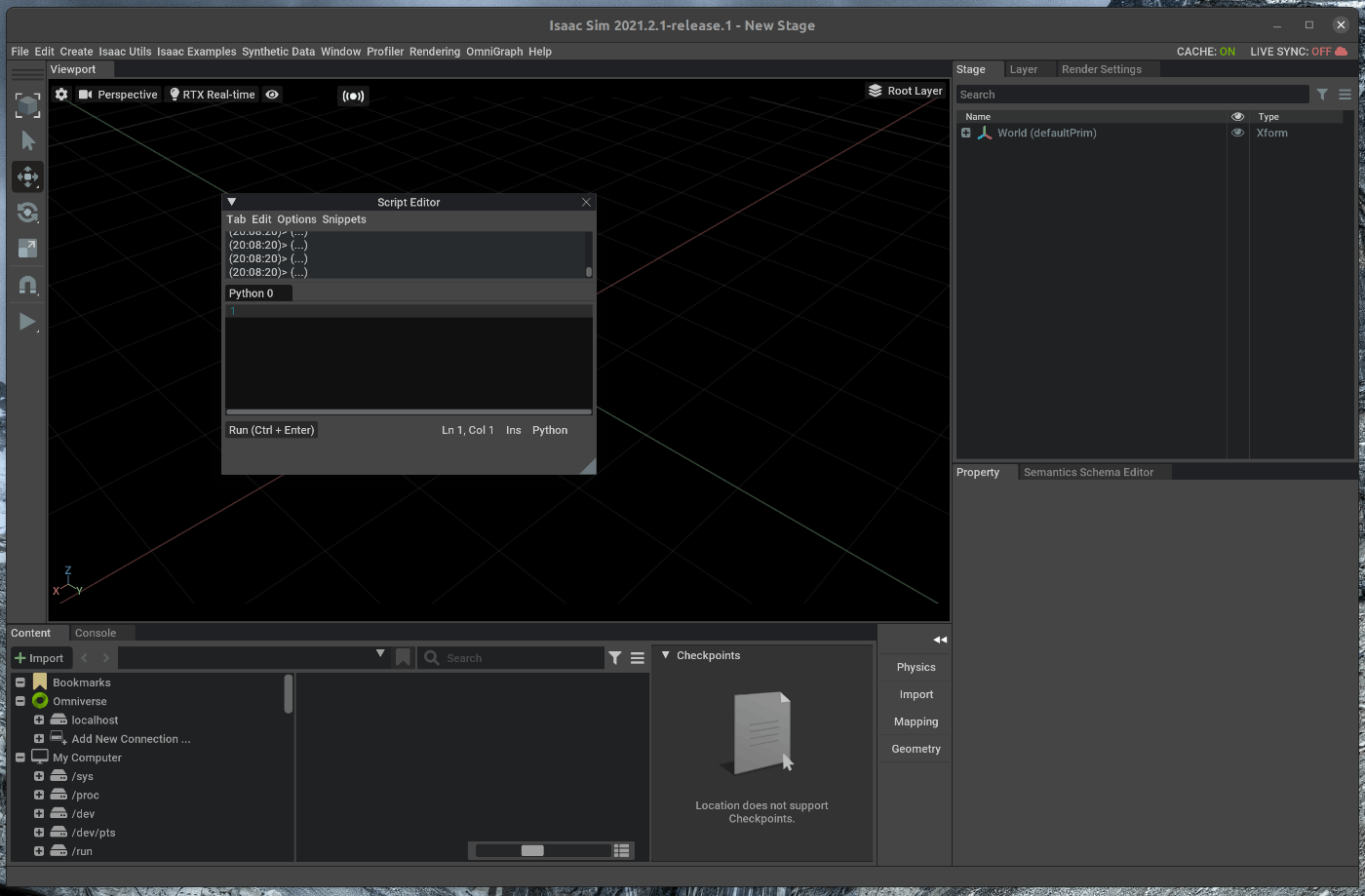
選択後、GUIの任意の位置にドラッグアンドドロップで配置します。
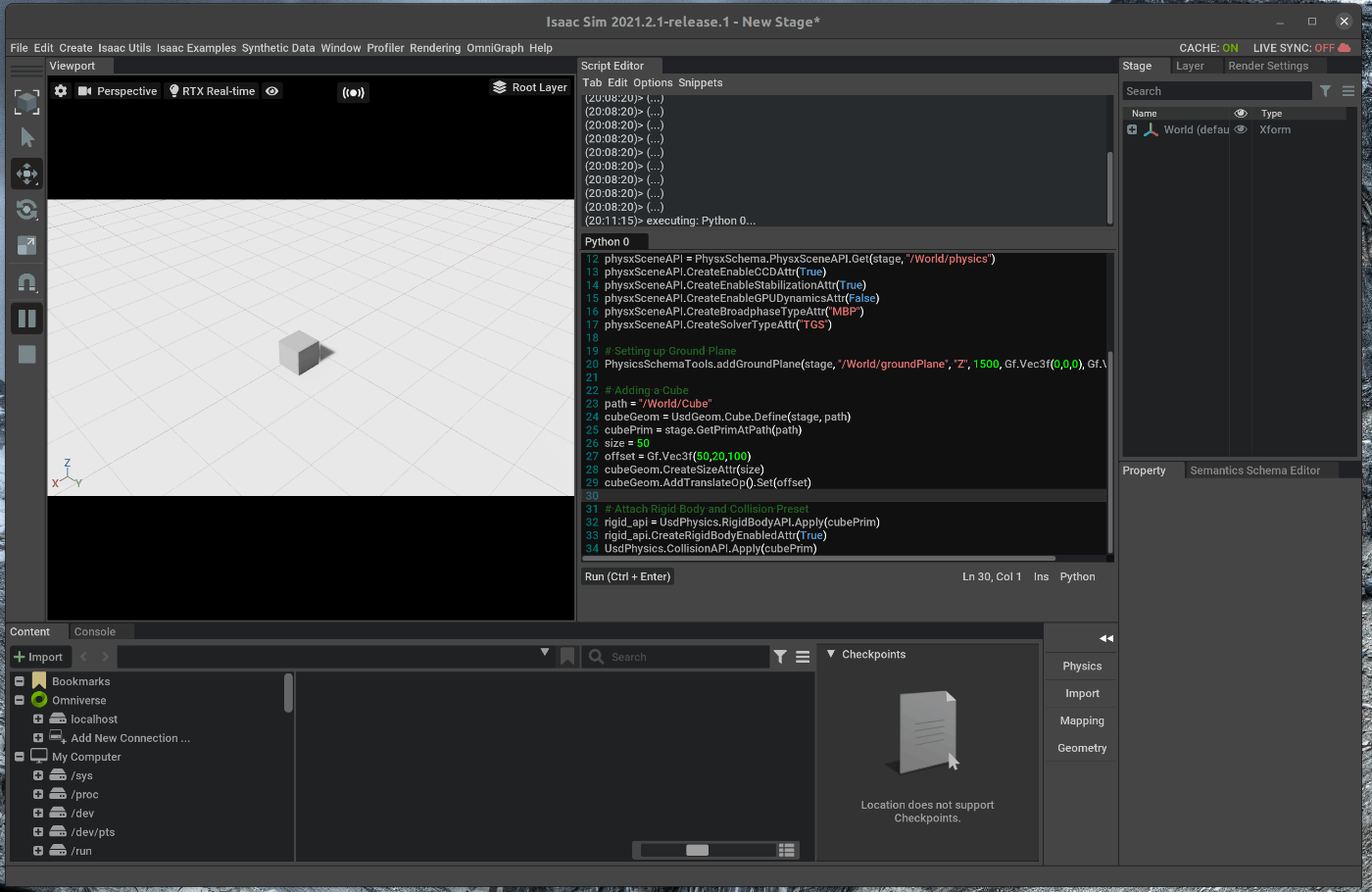
2. USD APIでシーンを操作
追加したScript EditorにUSD APIを用いてシーンを操作するScriptを記述し、実行します。
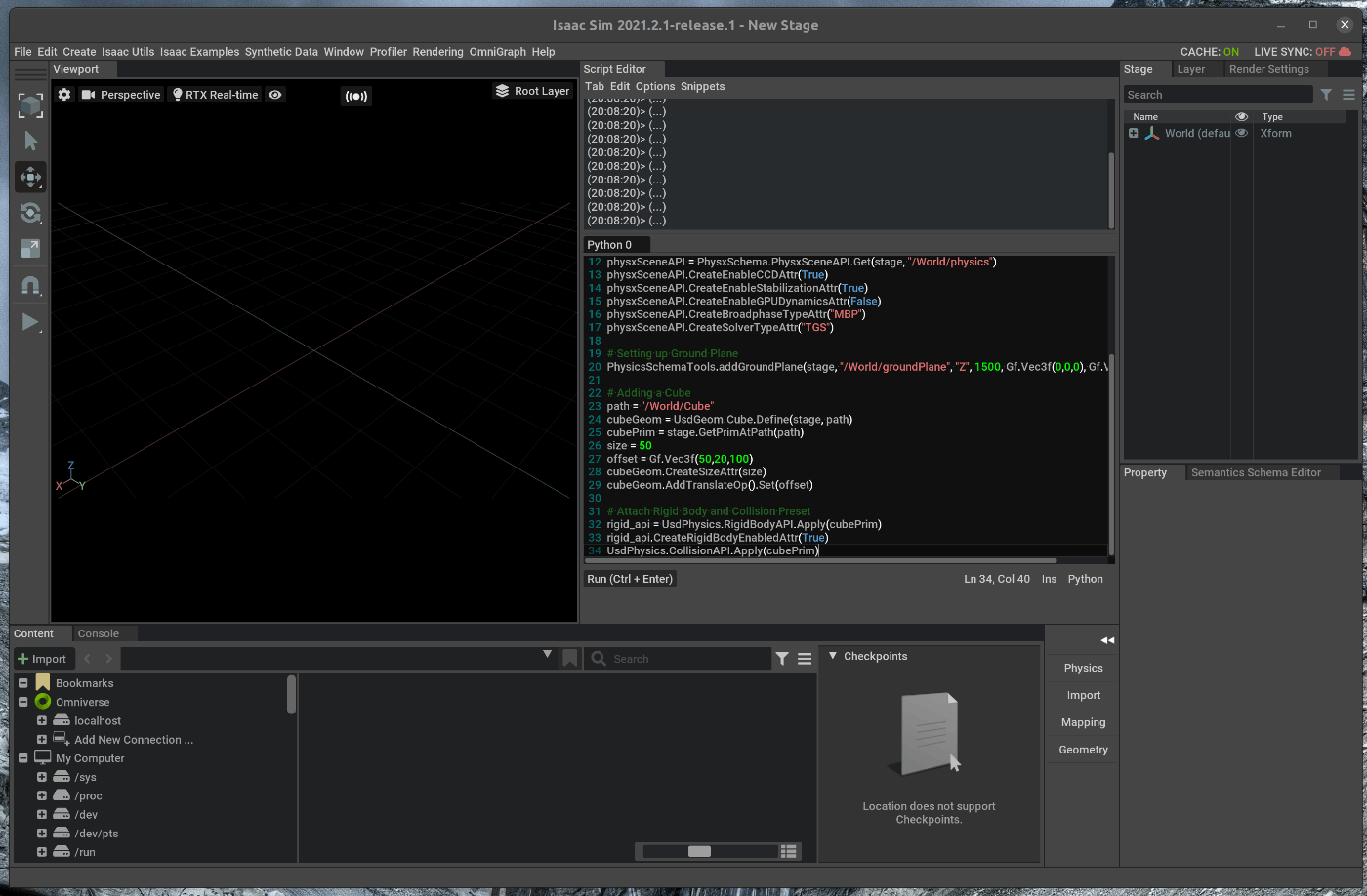
追加したScript Editorに次のコードを記述します。
from pxr import UsdPhysics, PhysxSchema, Gf, PhysicsSchemaTools
import omni
stage = omni.usd.get_context().get_stage()
# Setting up Physics Scene
gravity = 980
scene = UsdPhysics.Scene.Define(stage, "/World/physics")
scene.CreateGravityDirectionAttr().Set(Gf.Vec3f(0.0, 0.0, -1.0))
scene.CreateGravityMagnitudeAttr().Set(gravity)
PhysxSchema.PhysxSceneAPI.Apply(stage.GetPrimAtPath("/World/physics"))
physxSceneAPI = PhysxSchema.PhysxSceneAPI.Get(stage, "/World/physics")
physxSceneAPI.CreateEnableCCDAttr(True)
physxSceneAPI.CreateEnableStabilizationAttr(True)
physxSceneAPI.CreateEnableGPUDynamicsAttr(False)
physxSceneAPI.CreateBroadphaseTypeAttr("MBP")
physxSceneAPI.CreateSolverTypeAttr("TGS")
# Setting up Ground Plane
PhysicsSchemaTools.addGroundPlane(stage, "/World/groundPlane", "Z", 1500, Gf.Vec3f(0,0,0), Gf.Vec3f(0.5))
# Adding a Cube
path = "/World/Cube"
cubeGeom = UsdGeom.Cube.Define(stage, path)
cubePrim = stage.GetPrimAtPath(path)
size = 50
offset = Gf.Vec3f(50,20,100)
cubeGeom.CreateSizeAttr(size)
cubeGeom.AddTranslateOp().Set(offset)
# Attach Rigid Body and Collision Preset
rigid_api = UsdPhysics.RigidBodyAPI.Apply(cubePrim)
rigid_api.CreateRigidBodyEnabledAttr(True)
UsdPhysics.CollisionAPI.Apply(cubePrim
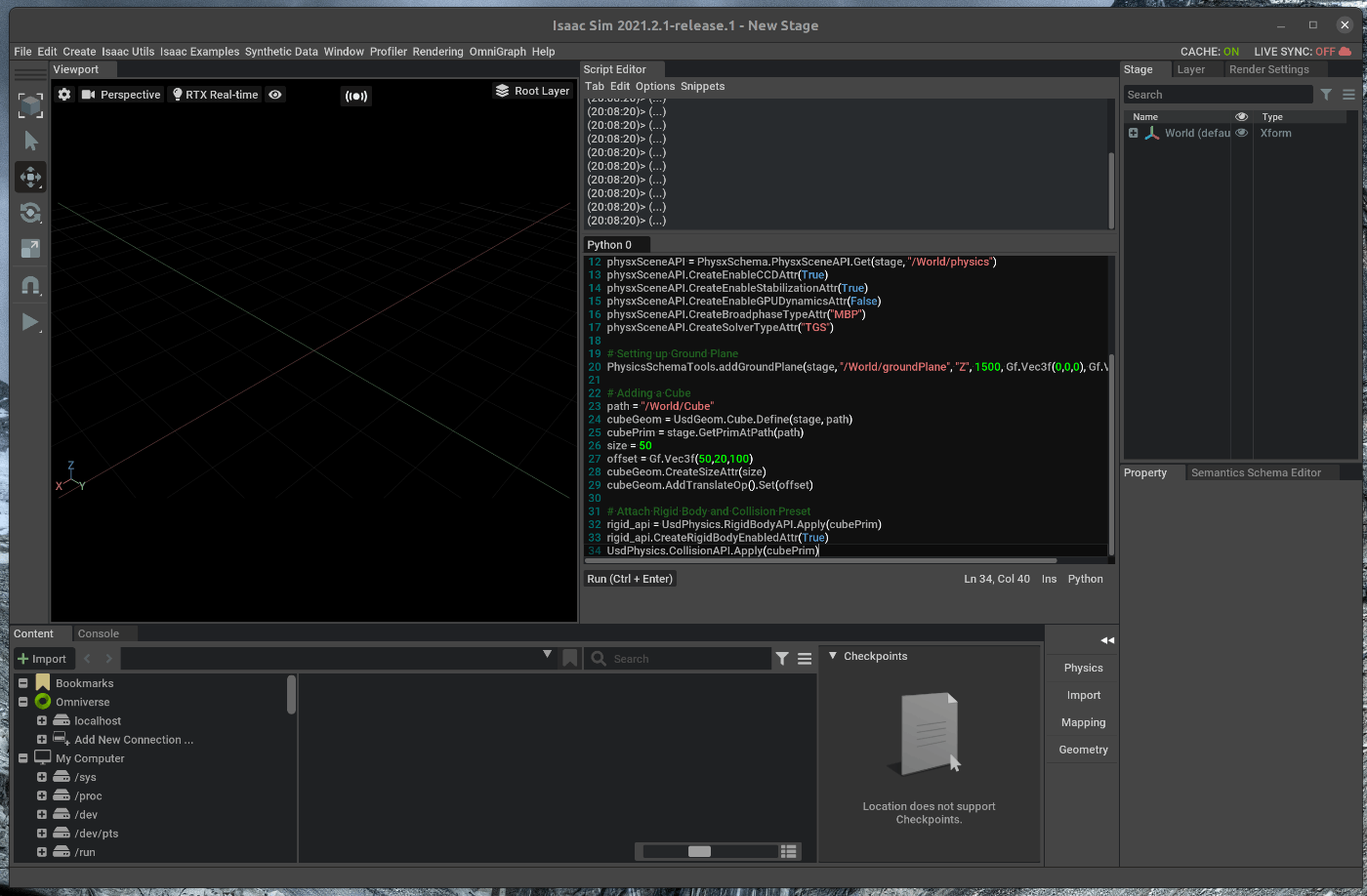
記述後、Ctrl+Enterを押すとScriptが実行され、シーン内に立方体が追加されます。

左側のツールバーのシミュレーションStartボタンを押すと、重力により立方体が落下します。
2. Issac Sim Core APIでシーンを操作
追加したScript EditorにIssac Sim Core APIを用いてシーンを操作するScriptを記述し、実行します。
Issac Sim Core APIでは、USD APIと比較して、よりロボットの操作が容易になるように設計されています。
その為、Issac Sim Core APIでは、上記で示したUSD APIでのScriptで実現したシーンを、より少ないコード量で実現することが可能です。
以下のスクリプトを実行する場合には、上記とは別の空のシーンを作成します。

追加したScript Editorに次のコードを記述します。
import numpy as np
from omni.isaac.core.objects import DynamicCuboid
from omni.isaac.core.objects.ground_plane import GroundPlane
GroundPlane(prim_path="/World/groundPlane", size=1000, color=np.array([0.5, 0.5, 0.5]))
DynamicCuboid(prim_path="/World/cube",
position=np.array([50, 20, 100.0]),
size=np.array([50, 50, 50]),
color=np.array([20,30,0]))
記述後、Ctrl+Enterを押すとScriptが実行され、シーン内に立方体が追加されます。
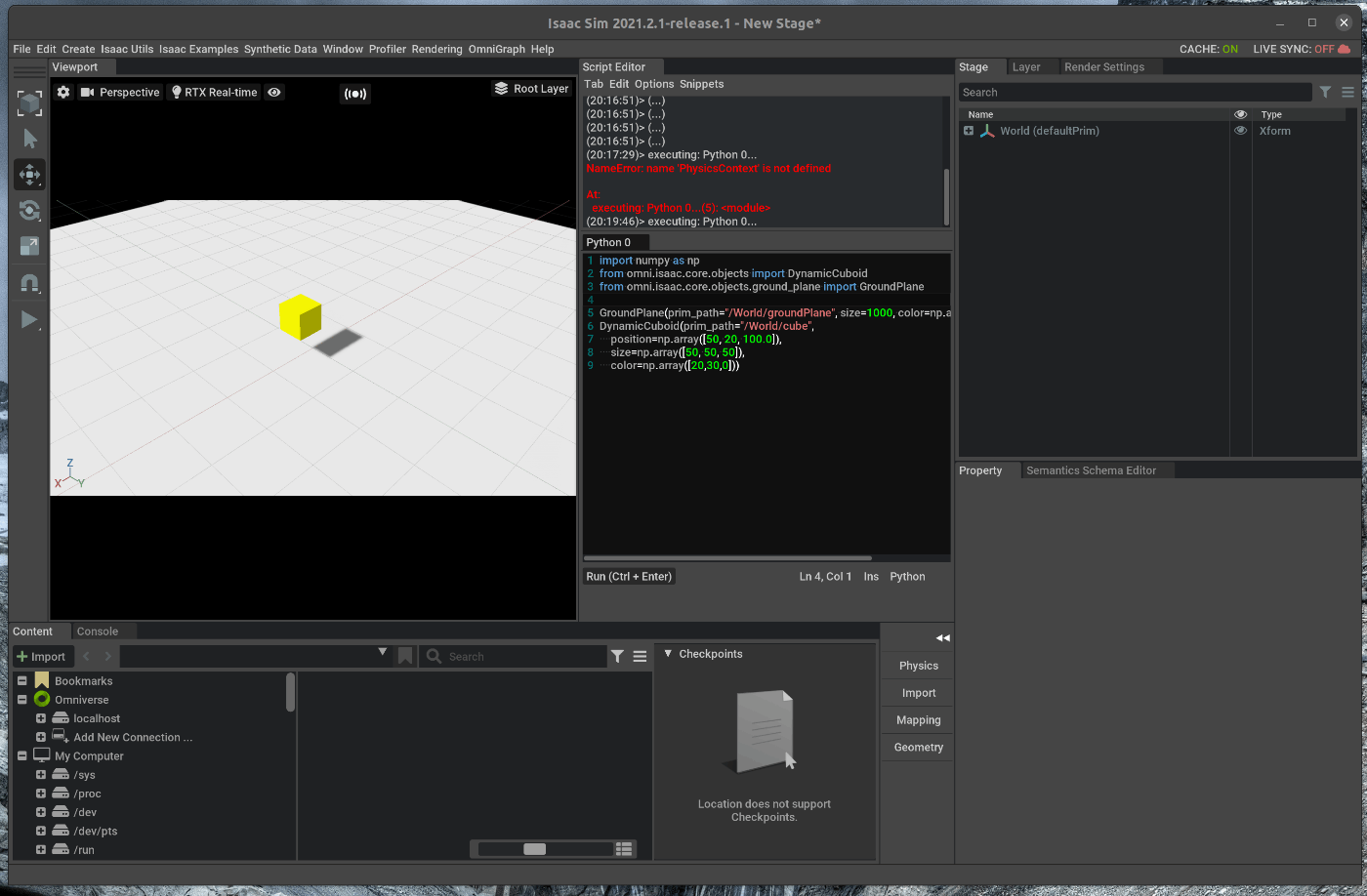
左側のツールバーのシミュレーションStartボタンを押すと、重力により立方体が落下します。
Discussion
omniverse関係の記事、大変参考にさせていただいています。ありがとうございます。
こちら⇩のリンクですが現在404になっており、 ⇩おそらくこちらにおひっこししてました!
@mama 様
ご指摘ありがとうございます。
教えて頂いたリンクに差し替えました。