NVIDIA Isaac Sim: Hello World
概要
Hello Worldのチュートリアルを進めます。
このチュートリアルはmulti robotのチュートリアルの6部の内の1部目です。
Issac Simのtutorialに上記の内容が記載されており、この内容に沿って進めます。
実行環境
- インストール実行環境
| unit | specification |
|---|---|
| CPU | i9-11900H |
| GPU | GeForce RTX 3080 Laptop |
| RAM | 32GB |
| OS | Ubuntu 20.04.3 LTS |
- Nvidia Driverバージョン
- 510.39.01
- Issac simバージョン
- 2021.2.1
概要
hellow worldのExampleのソースコードに処理を追加し、シーンにCubeを追加します。
まず、Extentsionの機能を用いて、Cubeを追加します。その後、Standalone Applicationでの実行を試します。
次の手順を進めます。
- Hello WorldのExampleのソースコードを開く
- Cubeの処理を追加する
- New Wxampleの追加
- Standalone Applicationでの実行
1. Hello WorldのExampleのソースコードを開く
1.1 OmniverseからIssac Simを起動する

1.2 Hello Worldのソースコードを表示
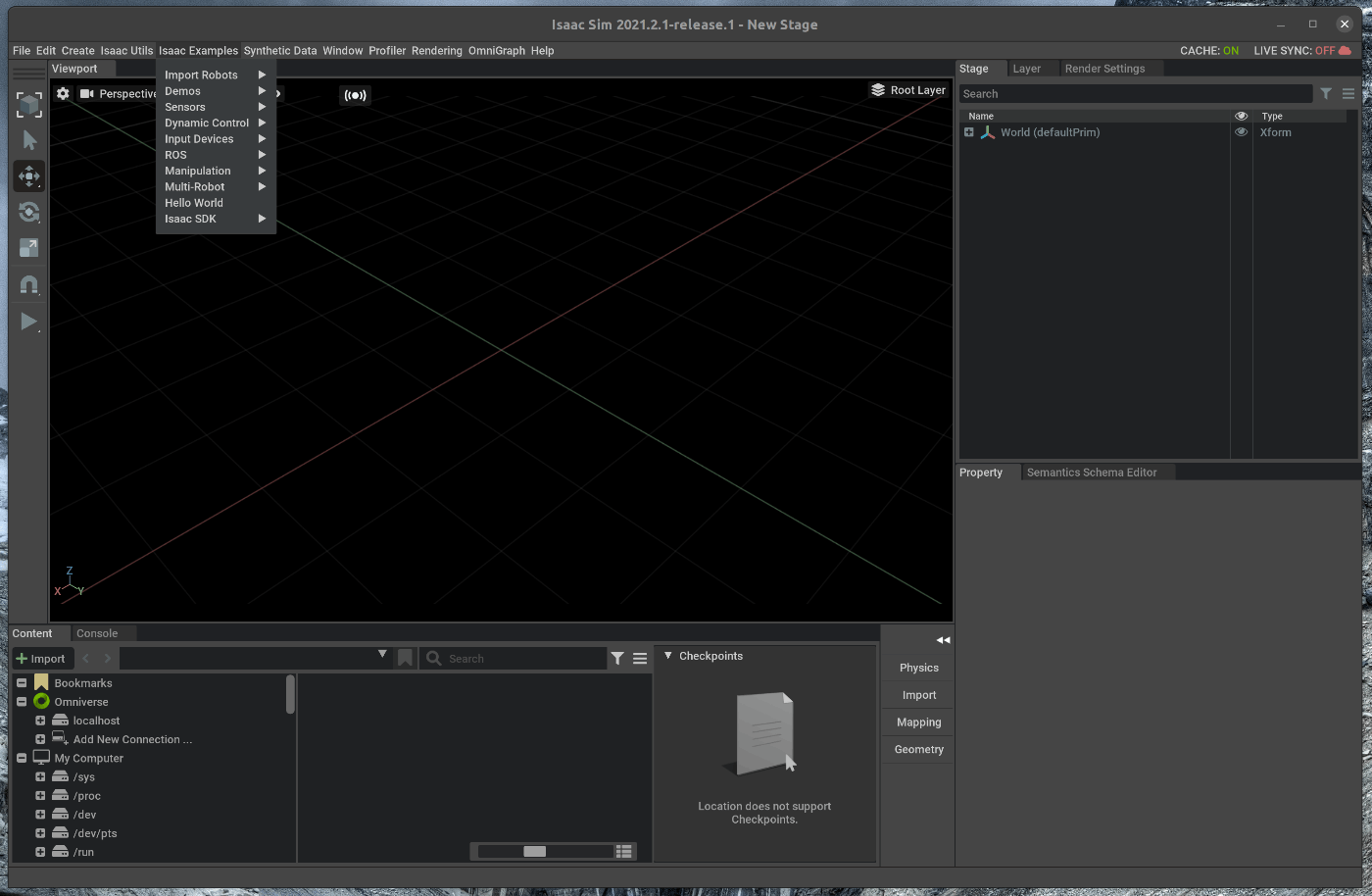
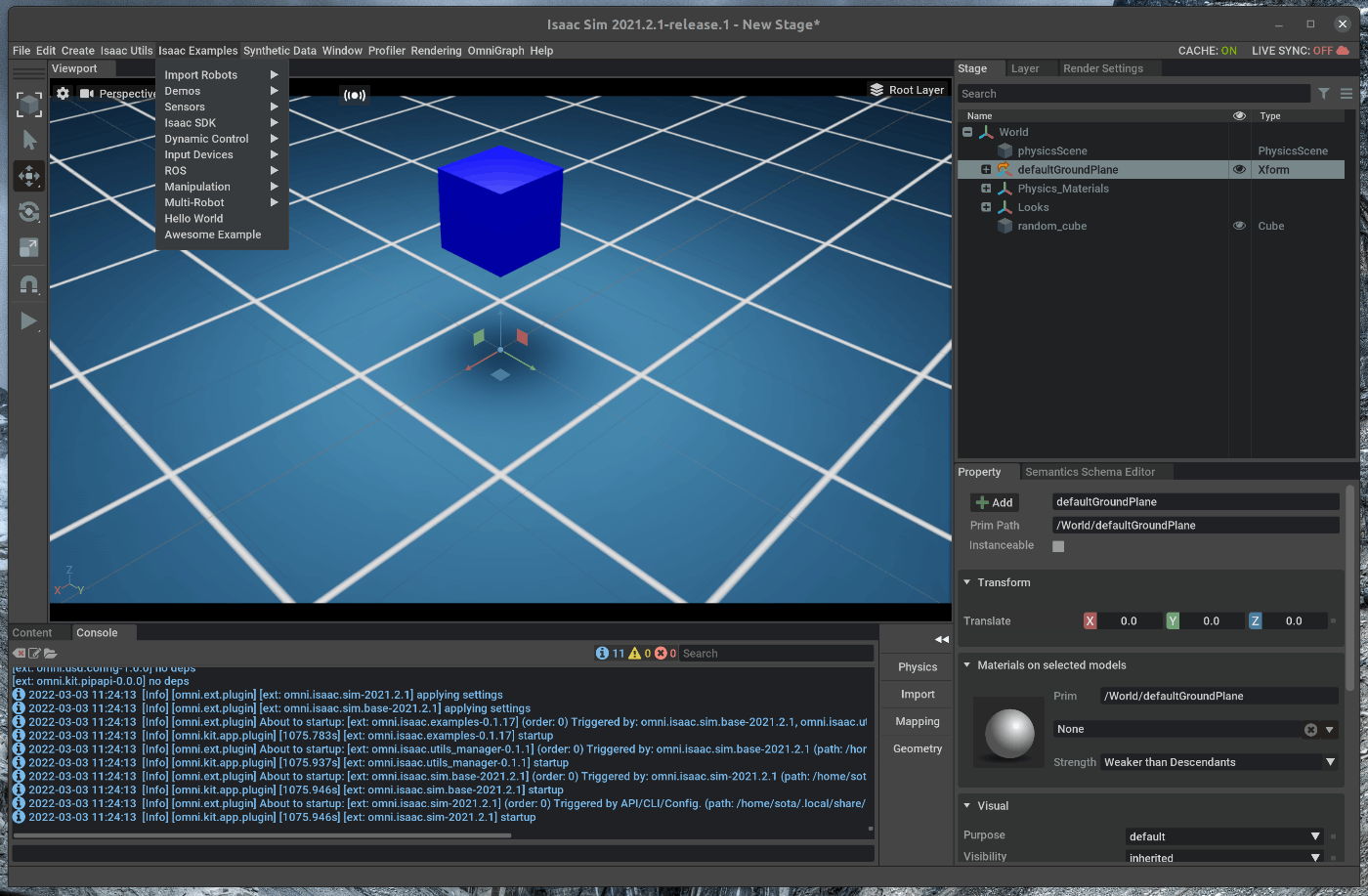
メニューバーのIsaac Examples > Hello Worldを選択します。
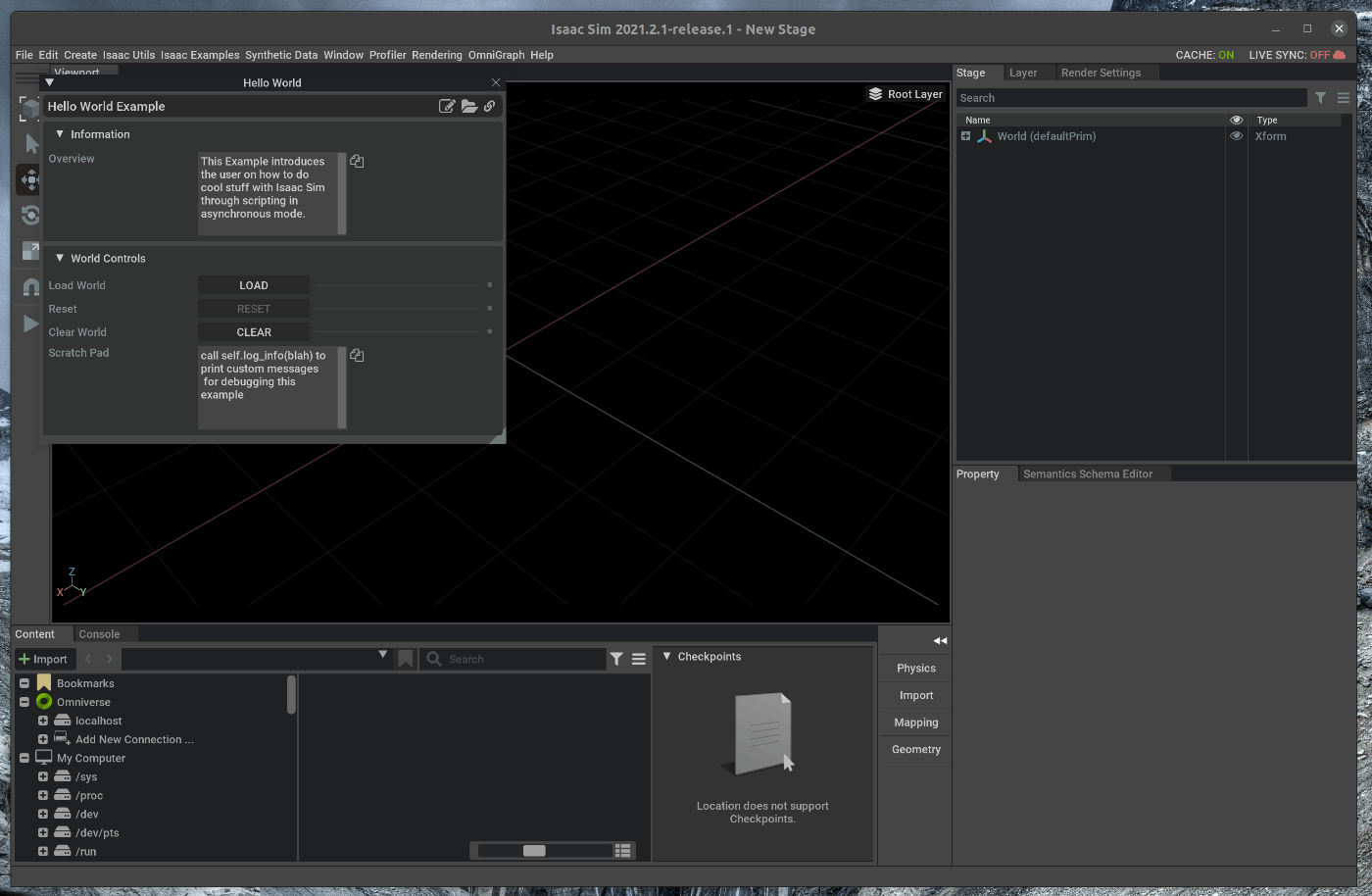
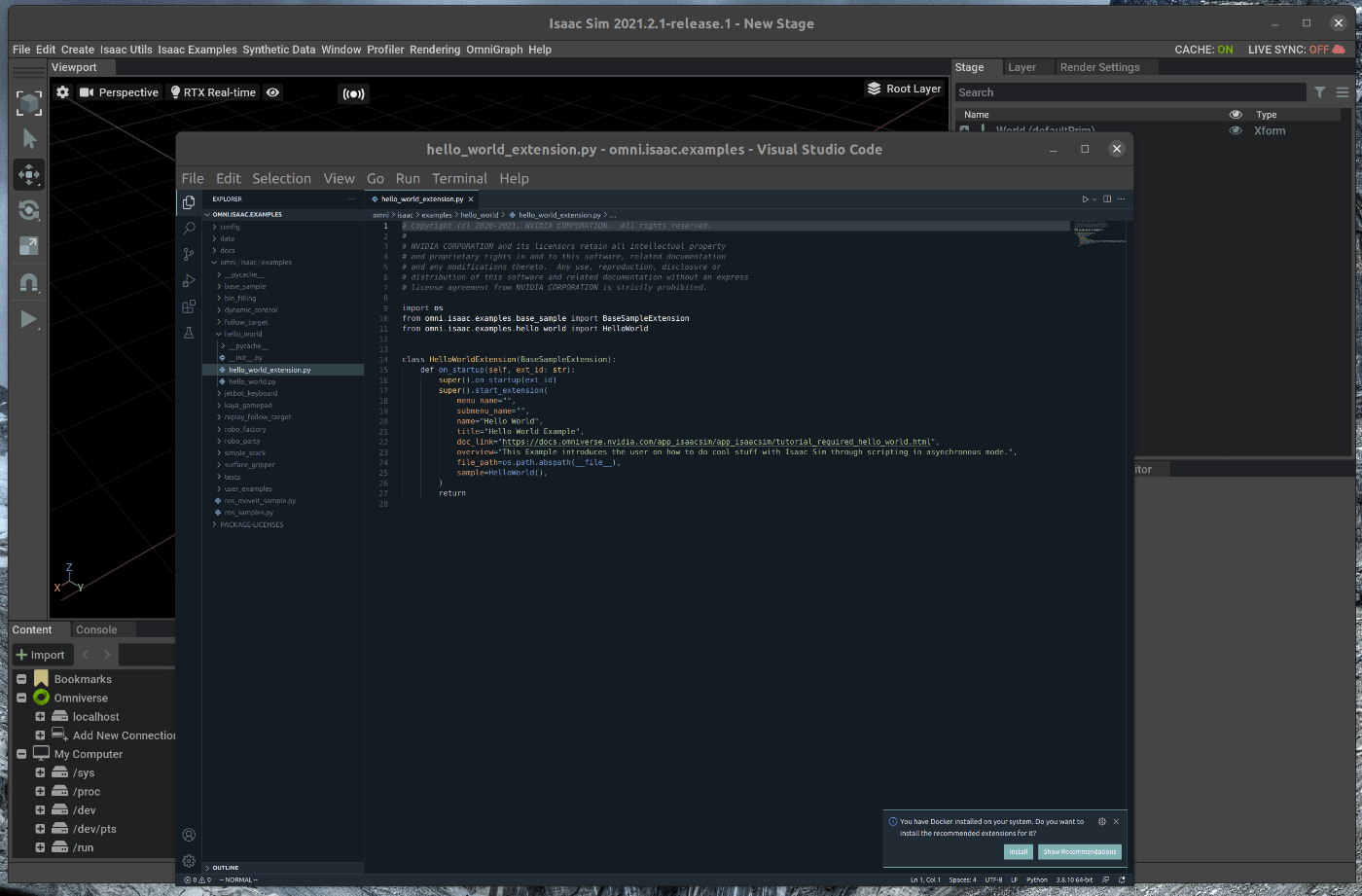
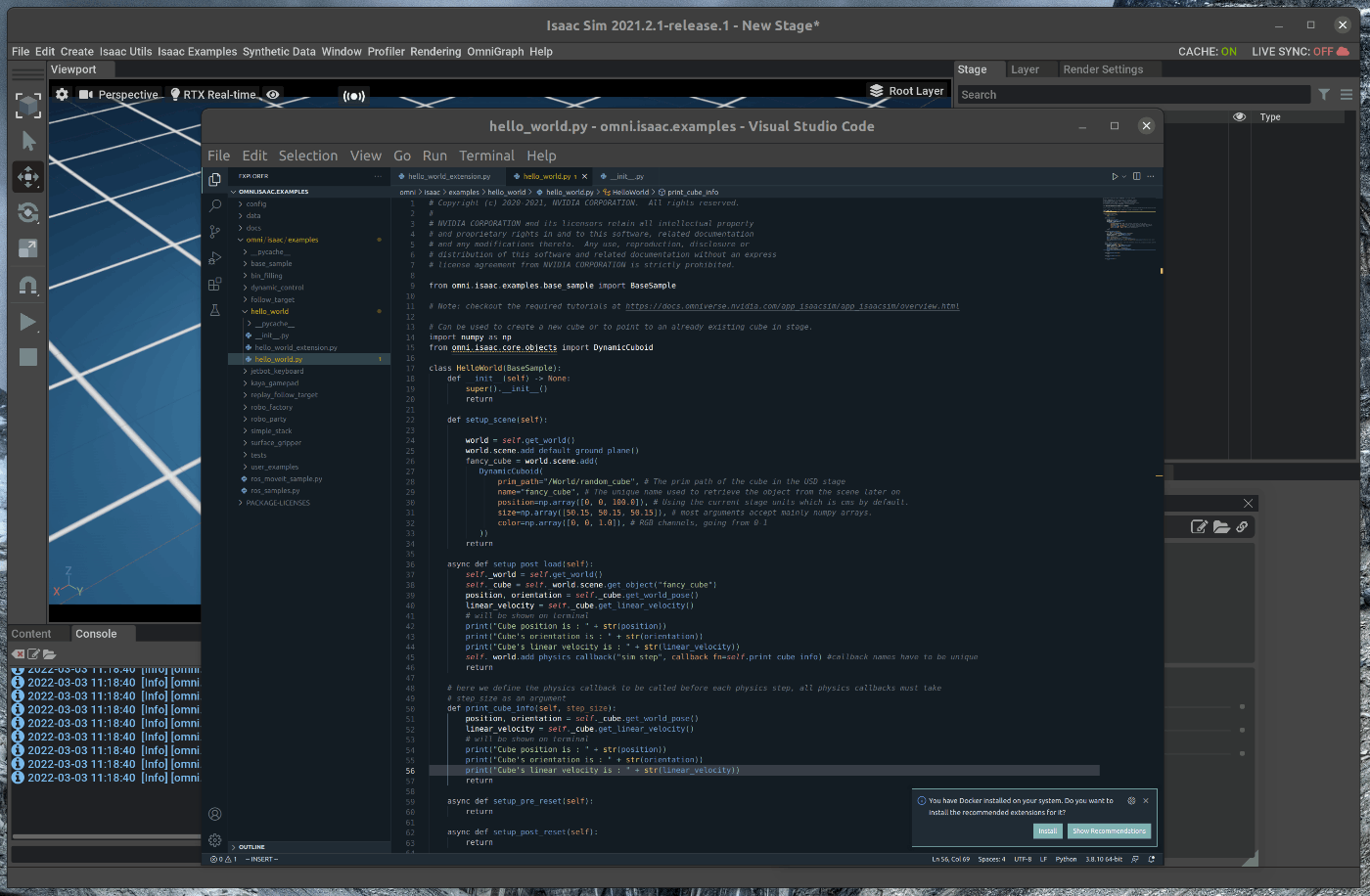
次に、Hello Worldのウィンドウの右上にある3つのボタンの内、一番左側のOpen Source Codeボタンを選択します。
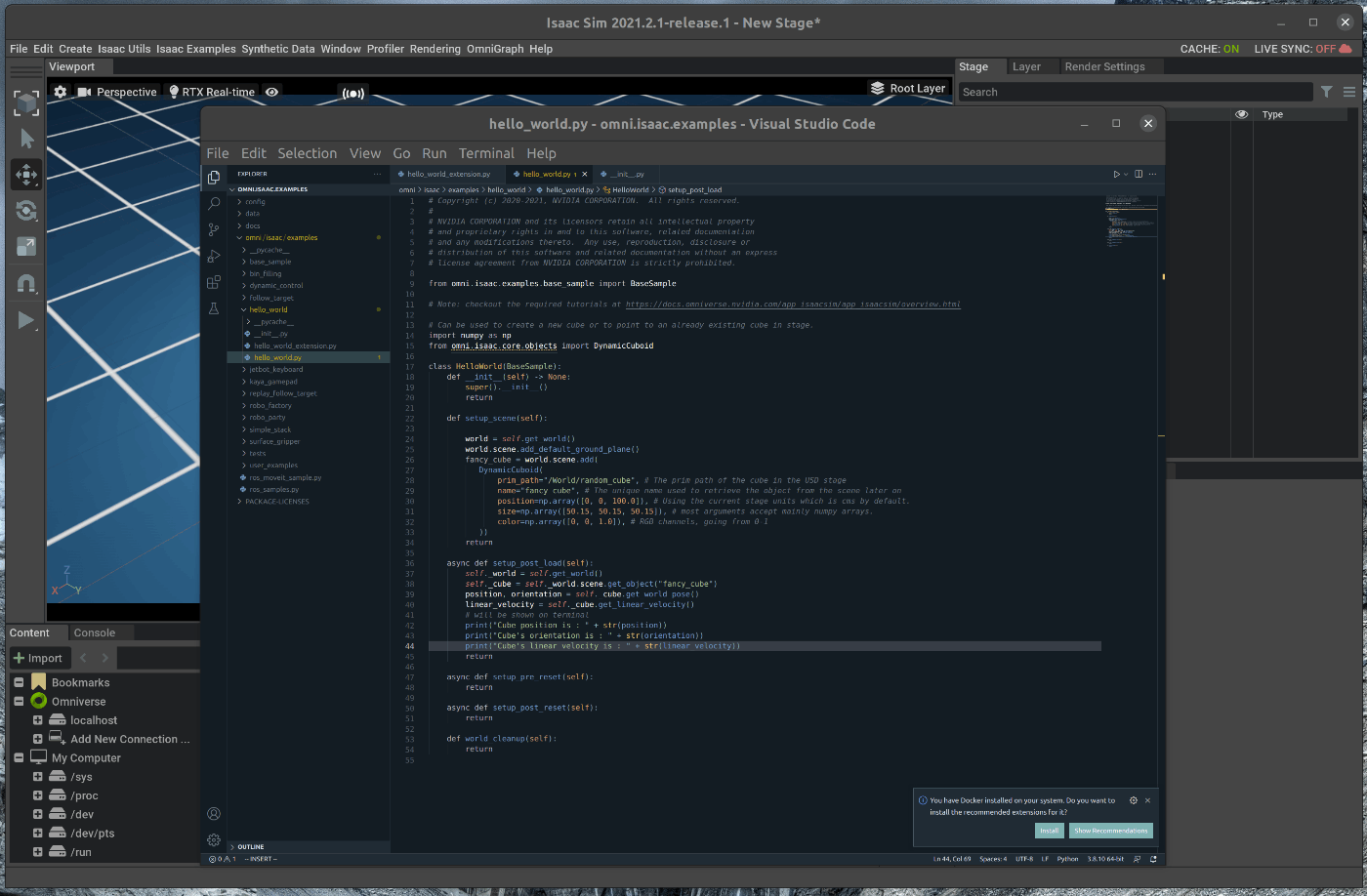
選択すると、がVScodeが開き、Hello Worldのソースコードが表示されます。
2. Cubeの処理を追加する
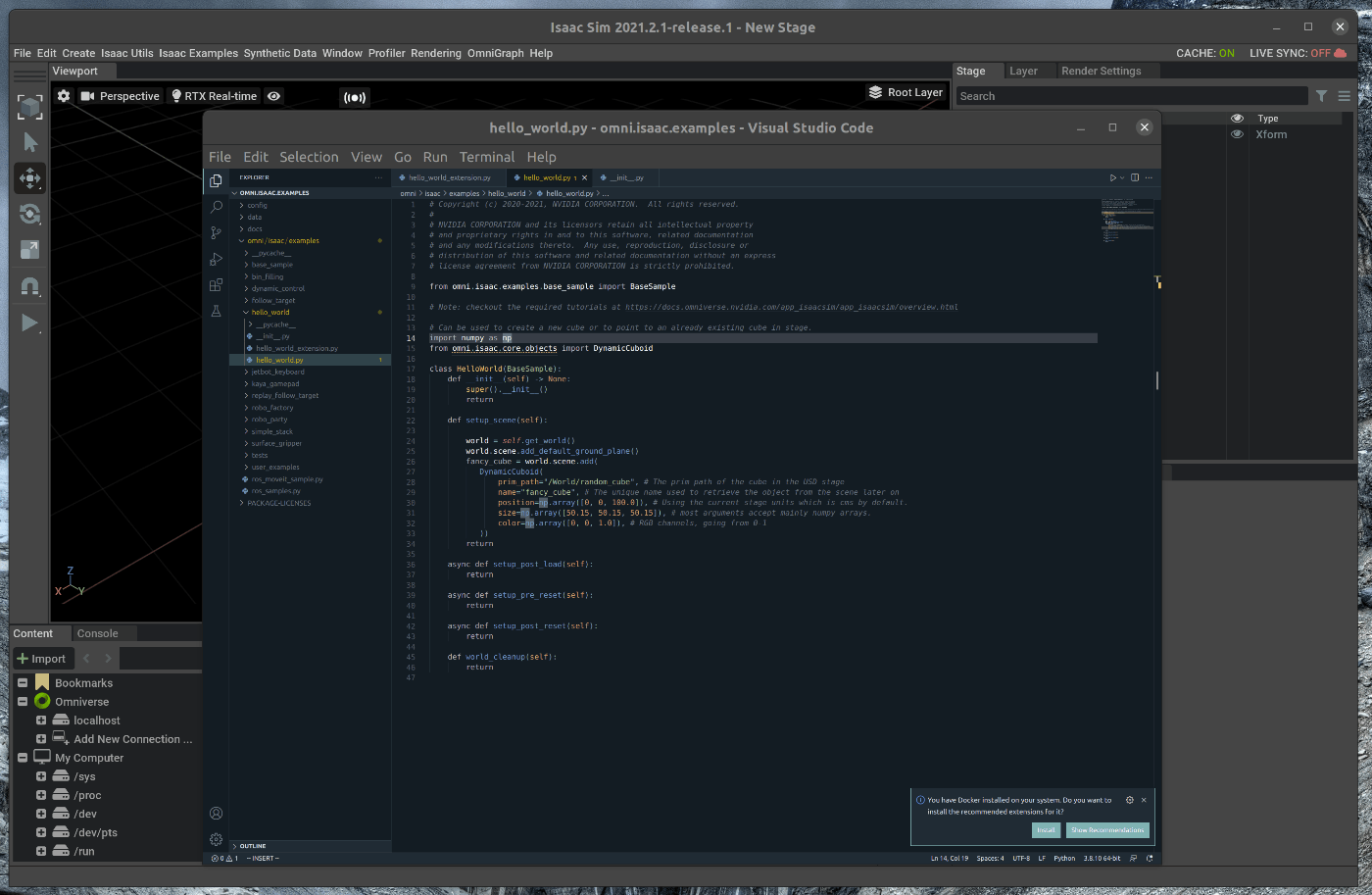
vscode上で、hello_world.pyを編集します。
2.1 Cubeの追加
hello_world.pyのsetup_sceneメソッドに次の処理を追加します。
from omni.isaac.examples.base_sample import BaseSample
import numpy as np
# Can be used to create a new cube or to point to an already existing cube in stage.
from omni.isaac.core.objects import DynamicCuboid ## add code
class HelloWorld(BaseSample):
def __init__(self) -> None:
super().__init__()
return
def setup_scene(self):
world = self.get_world()
world.scene.add_default_ground_plane()
## add code
fancy_cube = world.scene.add(
DynamicCuboid(
prim_path="/World/random_cube", # The prim path of the cube in the USD stage
name="fancy_cube", # The unique name used to retrieve the object from the scene later on
position=np.array([0, 0, 100.0]), # Using the current stage units which is cms by default.
size=np.array([50.15, 50.15, 50.15]), # most arguments accept mainly numpy arrays.
color=np.array([0, 0, 1.0]), # RGB channels, going from 0-1
))
return
追加後、Ctrl+Saveとhot reloadが実行されます。
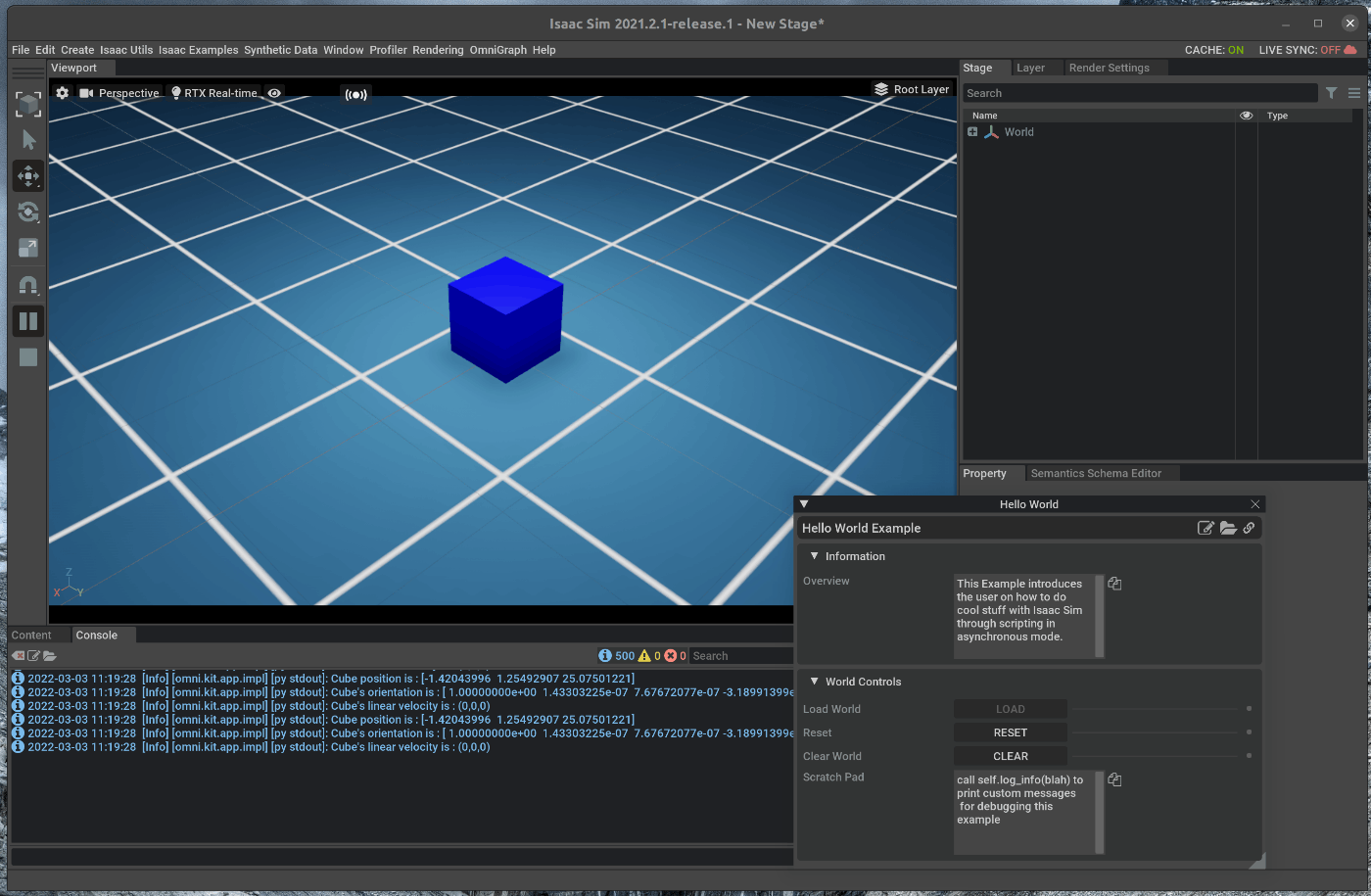
また、ソースコードを変更している為、メニューバーのIsaac Examples > Hello Worldを選択し、Loadを選択すると、ソースコードの変更部分が反映された状態で表示されます。
この状態で、Viewportの左側のPLAYボタンを押すと、Cubeが重力により落下します。
2.2 Cubeの位置と速度を表示する
ソースコードで、cubeクラスのメソッドを使用して、cubeの位置と速度を表示します。
cubeの位置と速度をロード字の1回のみ取得する場合には、次の処理を追加します。
from omni.isaac.examples.base_sample import BaseSample
import numpy as np
from omni.isaac.core.objects import DynamicCuboid
class HelloWorld(BaseSample):
def __init__(self) -> None:
super().__init__()
return
def setup_scene(self):
world = self.get_world()
world.scene.add_default_ground_plane()
fancy_cube = world.scene.add(
DynamicCuboid(
prim_path="/World/random_cube",
name="fancy_cube",
position=np.array([0, 0, 100.0]),
size=np.array([50.15, 50.15, 50.15]),
color=np.array([0, 0, 1.0]),
))
return
# Here we assign the class's variables
# this function is called after load button is pressed
# regardless starting from an empty stage or not
# this is called after setup_scene and after
# one physics time step to propagate appropriate
# physics handles which are needed to retrieve
# many physical properties of the different objects
async def setup_post_load(self):
self._world = self.get_world()
self._cube = self._world.scene.get_object("fancy_cube")
## add code
position, orientation = self._cube.get_world_pose()
linear_velocity = self._cube.get_linear_velocity()
# will be shown on terminal
print("Cube position is : " + str(position))
print("Cube's orientation is : " + str(orientation))
print("Cube's linear velocity is : " + str(linear_velocity))
##
return
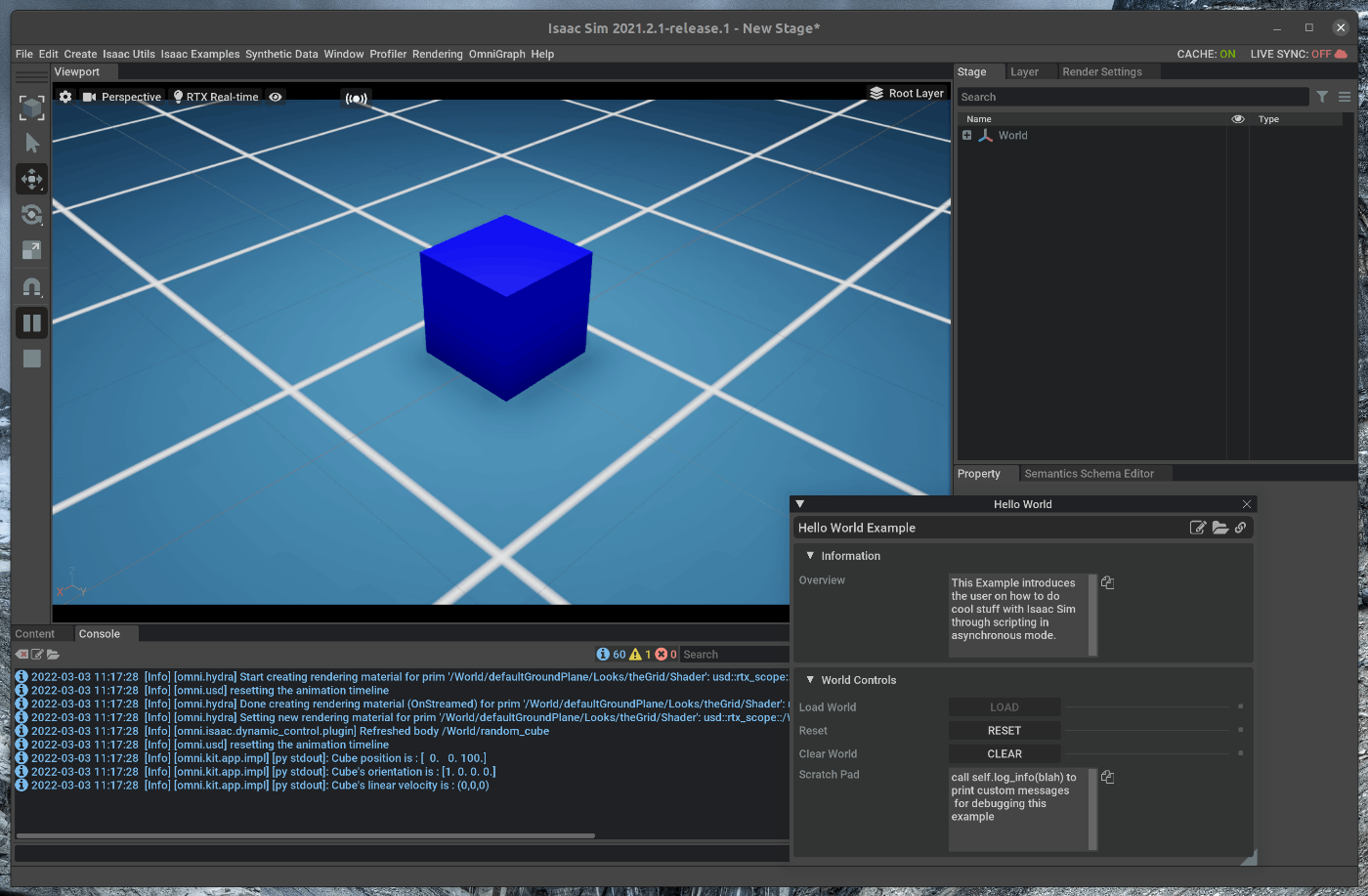
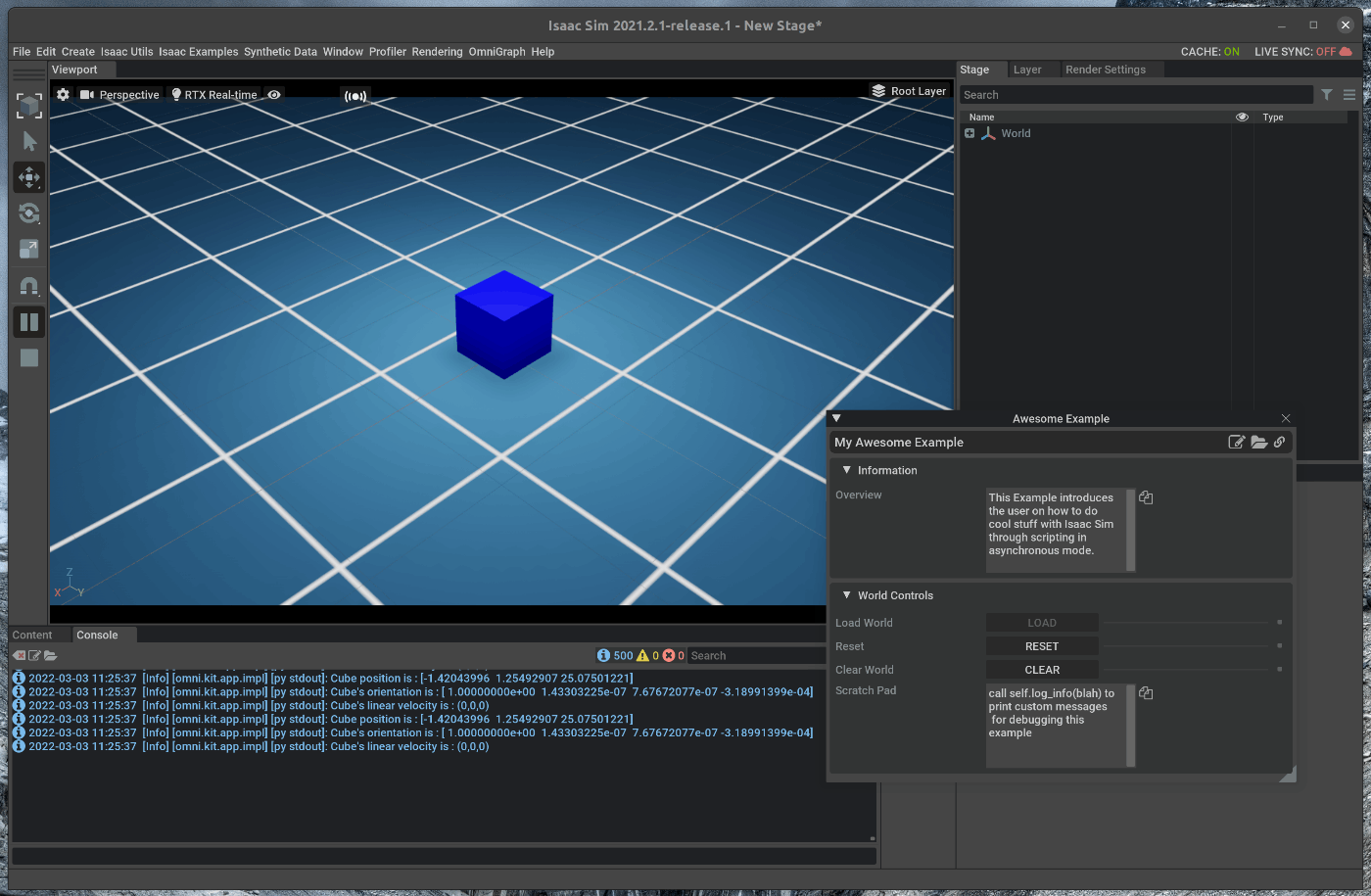
取得したcubeの位置と速度はGUiの下部にあるコンソールに表示されます。
また、Physics stepごとにcubeの位置と速度を取得する場合には、worldクラスのcallbackメソッドを使用します。
hello_world.pyに次の処理を追加します。
from omni.isaac.examples.base_sample import BaseSample
import numpy as np
from omni.isaac.core.objects import DynamicCuboid
class HelloWorld(BaseSample):
def __init__(self) -> None:
super().__init__()
return
def setup_scene(self):
world = self.get_world()
world.scene.add_default_ground_plane()
fancy_cube = world.scene.add(
DynamicCuboid(
prim_path="/World/random_cube",
name="fancy_cube",
position=np.array([0, 0, 100.0]),
size=np.array([50.15, 50.15, 50.15]),
color=np.array([0, 0, 1.0]),
))
return
async def setup_post_load(self):
self._world = self.get_world()
self._cube = self._world.scene.get_object("fancy_cube")
## add code
self._world.add_physics_callback("sim_step", callback_fn=self.print_cube_info) #callback names have to be unique
##
return
## add code
# here we define the physics callback to be called before each physics step, all physics callbacks must take
# step_size as an argument
def print_cube_info(self, step_size):
position, orientation = self._cube.get_world_pose()
linear_velocity = self._cube.get_linear_velocity()
# will be shown on terminal
print("Cube position is : " + str(position))
print("Cube's orientation is : " + str(orientation))
print("Cube's linear velocity is : " + str(linear_velocity))
##
取得したcubeの位置と速度はGUiの下部にあるコンソールに表示されます。
- New Exampleの追加
GUIからロードすることができるExampleを新たに追加します。
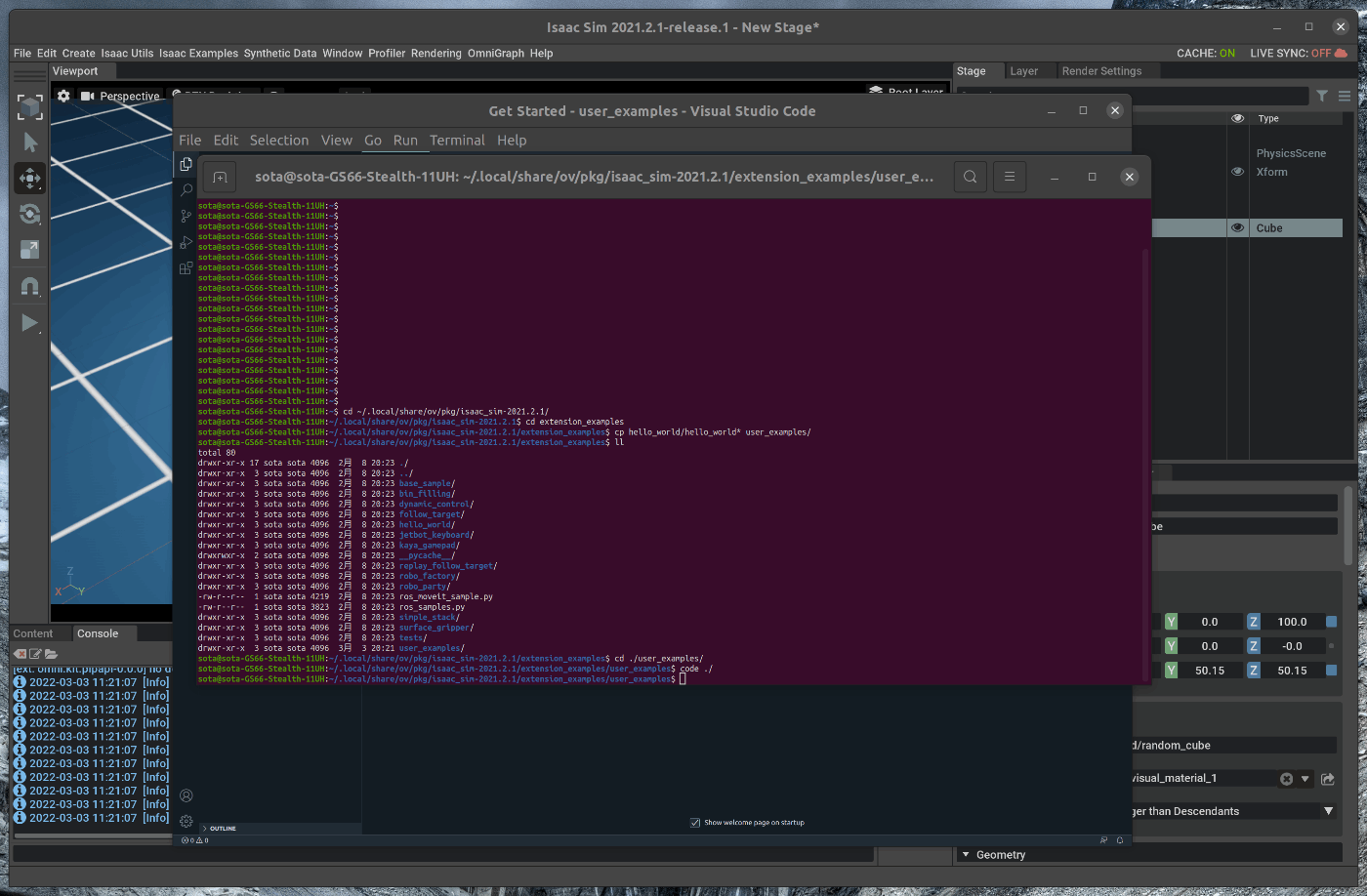
ターミナルで次のコマンドを実行します。
cd ~/.local/share/ov/pkg/isaac_sim-2021.2.1/
cd extension_examples
cp hello_world/hello_world* user_examples/
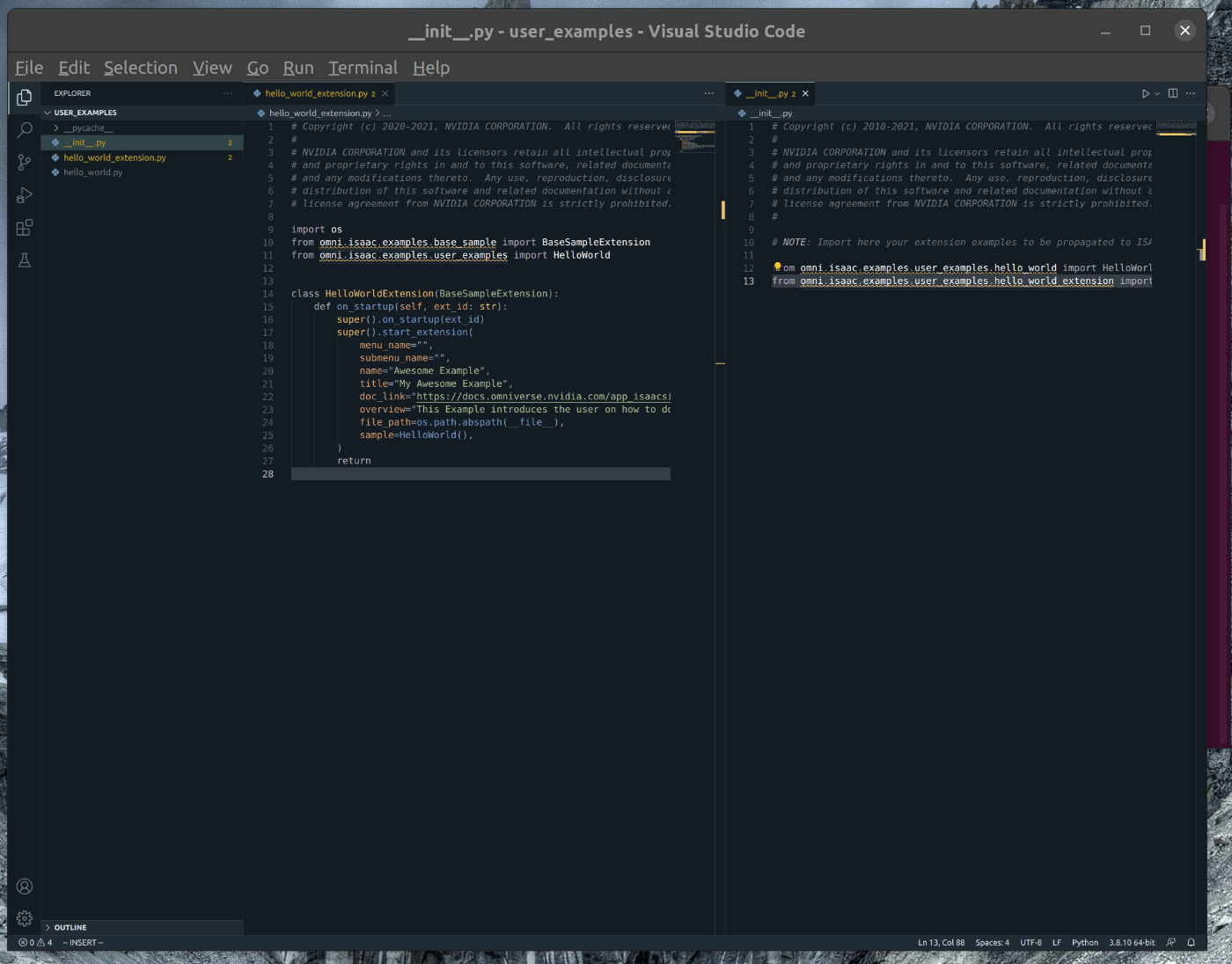
extension_examples/user_examples/init.py に次の2行を追加します。
from omni.isaac.examples.user_examples.hello_world import HelloWorld
from omni.isaac.examples.user_examples.hello_world_extension import HelloWorldExtension
extension_examples/user_examples/hello_world_extension.py を次の様に編集します。
import os
from omni.isaac.examples.base_sample import BaseSampleExtension
## edit code
from omni.isaac.examples.user_examples import HelloWorld
##
class HelloWorldExtension(BaseSampleExtension):
def on_startup(self, ext_id: str):
super().on_startup(ext_id)
super().start_extension(
menu_name="",
submenu_name="",
## edit code
name="Awesome Example",
title="My Awesome Example",
##
doc_link="https://docs.omniverse.nvidia.com/app_isaacsim/app_isaacsim/tutorial_required_hello_world.html",
overview="This Example introduces the user on how to do cool stuff with Isaac Sim through scripting in asynchronous mode.",
file_path=os.path.abspath(__file__),
sample=HelloWorld(),
)
return
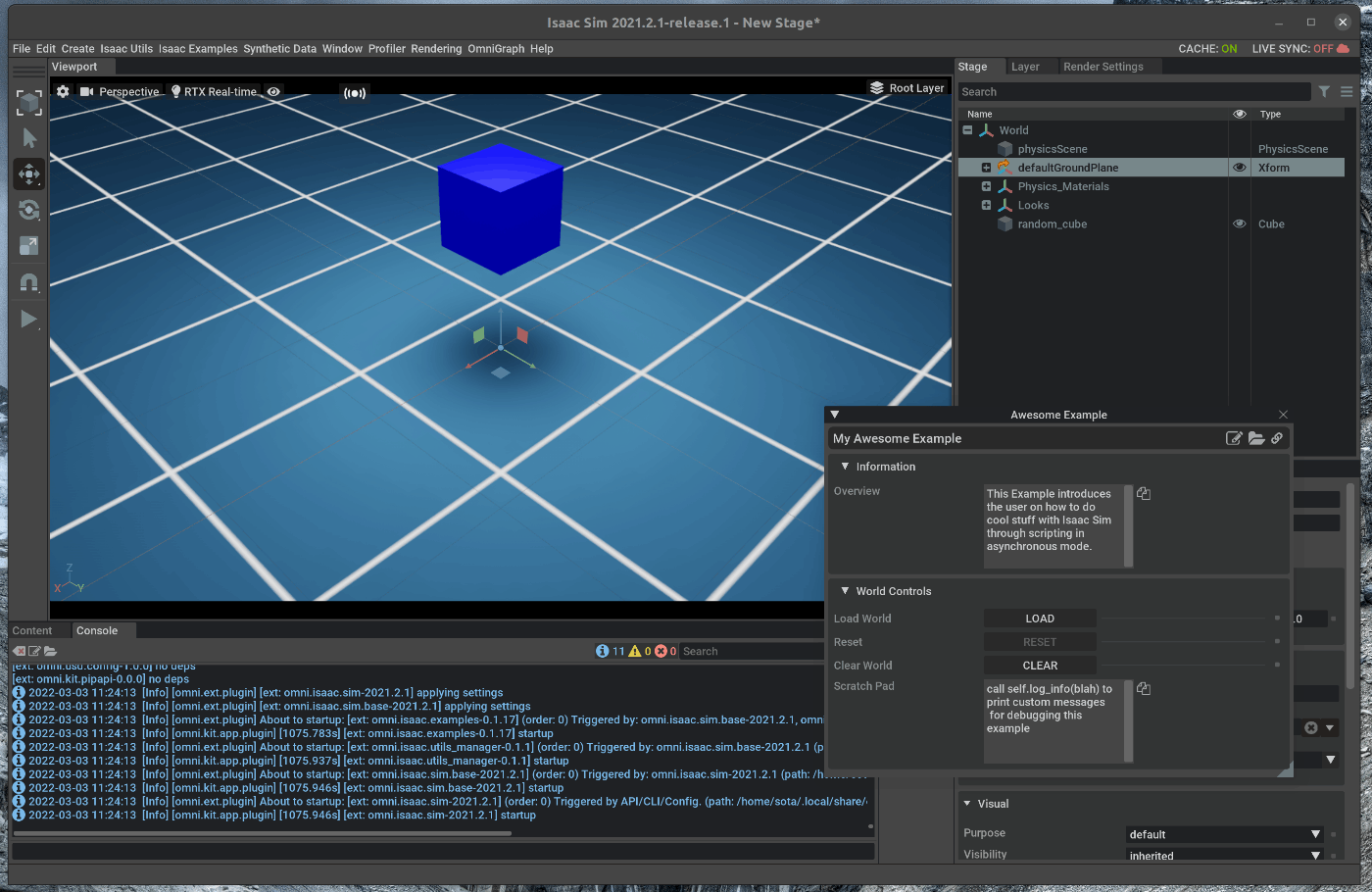
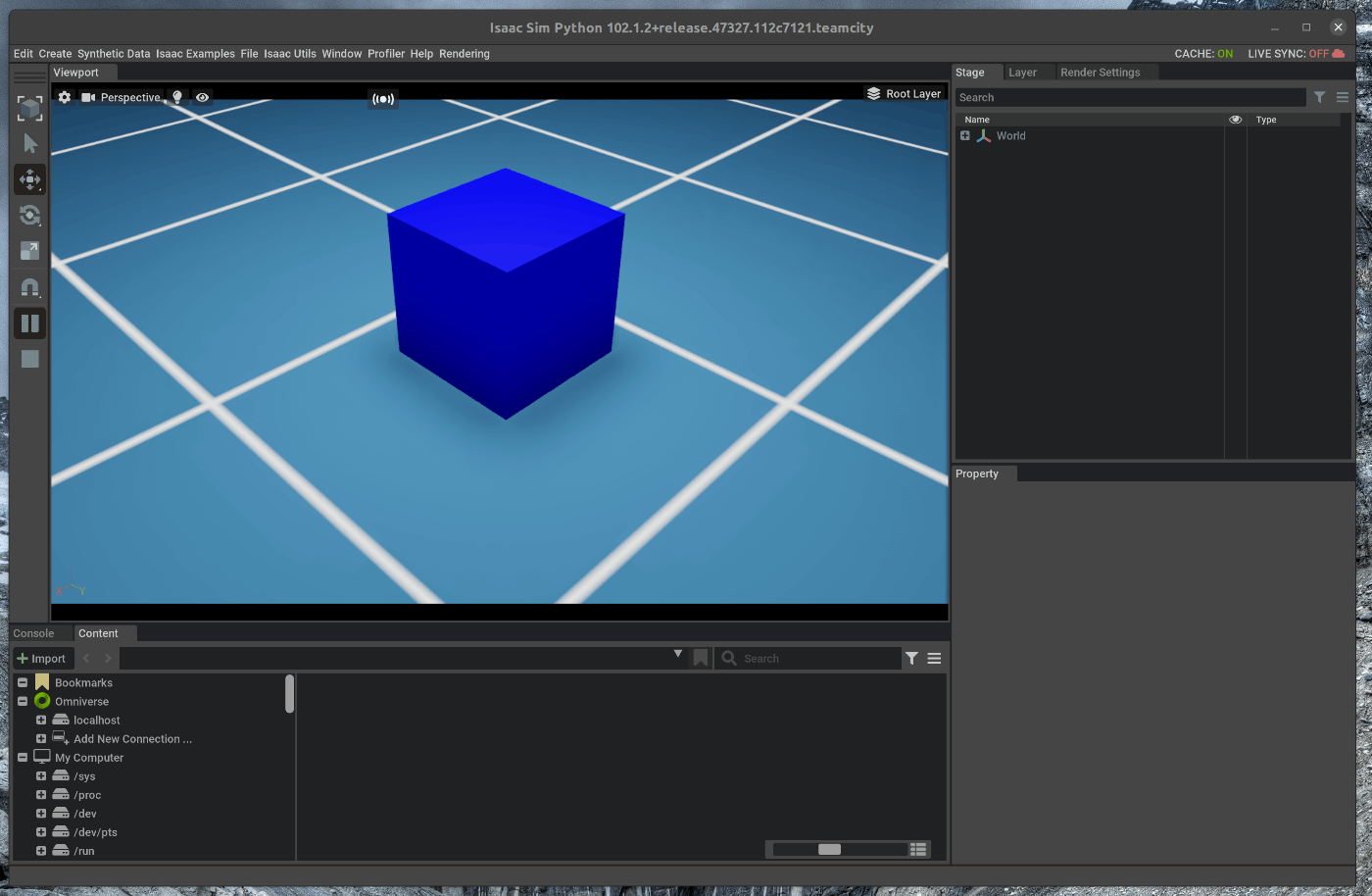
追加後、Isaac simを起動し、メニューバーのIsaac Examples > Awesome Exampleを選択します。
選択すると、Cubeが追加されたシーンが表示されます。
- Standalone Applicationでの実行
上記のCubeの追加処理をStandalone Applicationとして実行します。
任意のPATHにmy_application.pyを作成し、次のコードを記述します。
#launch Isaac Sim before any other imports
#default first two lines in any standalone application
from omni.isaac.kit import SimulationApp
simulation_app = SimulationApp({"headless": False}) # we can also run as headless.
from omni.isaac.core import World
from omni.isaac.core.objects import DynamicCuboid
import numpy as np
world = World(stage_units_in_meters=0.01)
world.scene.add_default_ground_plane()
fancy_cube = world.scene.add(
DynamicCuboid(
prim_path="/World/random_cube",
name="fancy_cube",
position=np.array([0, 0, 100.0]),
size=np.array([50.15, 50.15, 50.15]),
color=np.array([0, 0, 1.0]),
))
# Resetting the world needs to be called before querying anything related to an articulation specifically.
# Its recommended to always do a reset after adding your assets, for physics handles to be propagated properly
world.reset()
for i in range(500):
position, orientation = fancy_cube.get_world_pose()
linear_velocity = fancy_cube.get_linear_velocity()
# will be shown on terminal
print("Cube position is : " + str(position))
print("Cube's orientation is : " + str(orientation))
print("Cube's linear velocity is : " + str(linear_velocity))
# we have control over stepping physics and rendering in this workflow
# things run in sync
world.step(render=True) # execute one physics step and one rendering step
simulation_app.close() # close Isaac Sim
ターミナル上で、以下のコマンドを実行します。
"<path_to_script>"は、my_application.pyがあるpathに置き換えます。
cd ~/.local/share/ov/pkg/isaac_sim-2021.2.1/
./python.sh <path_to_script>/my_application.py
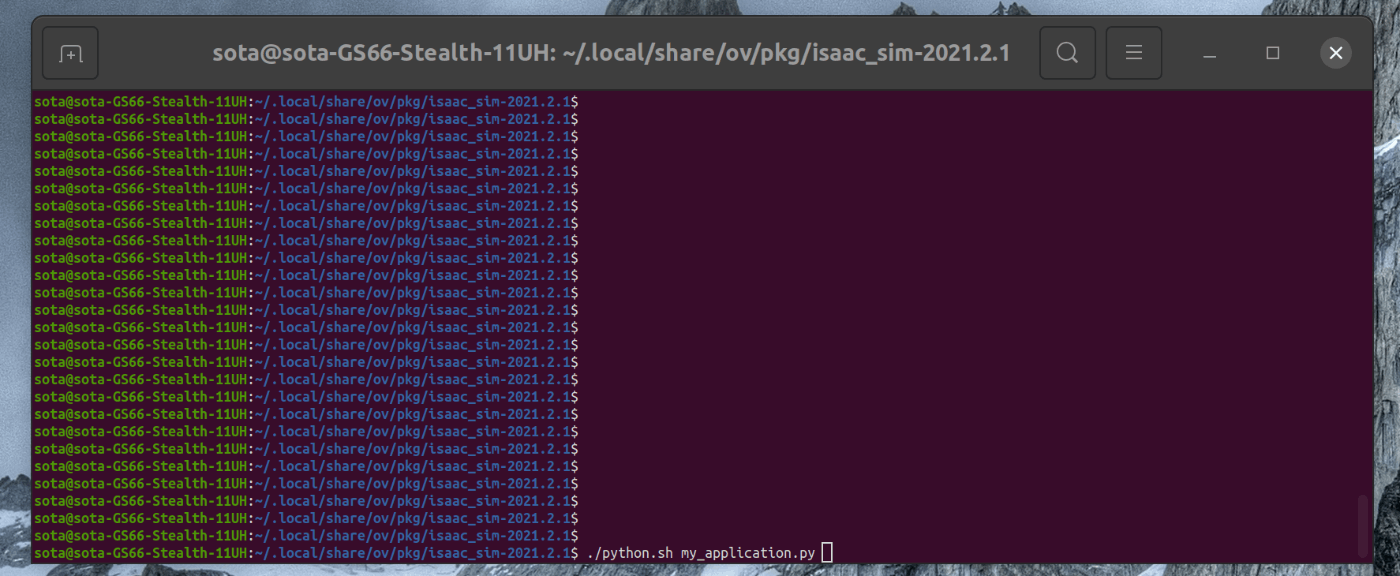
実行すると、Isaac simが起動しシーン内にCubeが表示されます。
Discussion