NVIDIA Isaac Sim: Generic Range Sensorの使用
概要
シミュレーション内で投射パターンを自由に変更することが可能なLIDARを使用します。
Issac Simのtutorialに上記の内容が記載されており、この内容に沿って進めます。
実行環境
- インストール実行環境
| unit | specification |
|---|---|
| CPU | i9-11900H |
| GPU | GeForce RTX 3080 Laptop |
| RAM | 32GB |
| OS | Ubuntu 20.04.3 LTS |
- Nvidia Driverバージョン
- 510.39.01
- Issac simバージョン
- 2021.2.1
手順
GUI上からの操作と、Python APIからシーンにLIDARを追加します。
- Generic Range Sensorの追加(GUI)
- Generic Range Sensorの設定を変更する
1. Generic Range Sensorの追加(GUI)
こちらのページに記載してある手順を進めます。
1.1 OmniverseからIssac Simを起動する

1.2 シーンを作成する
メニューバーのCreate > Physics > Phisics Sceneを選択します。

1.3 LIDARの追加
作成したシーン内に、Generic Range Sensorを追加します。
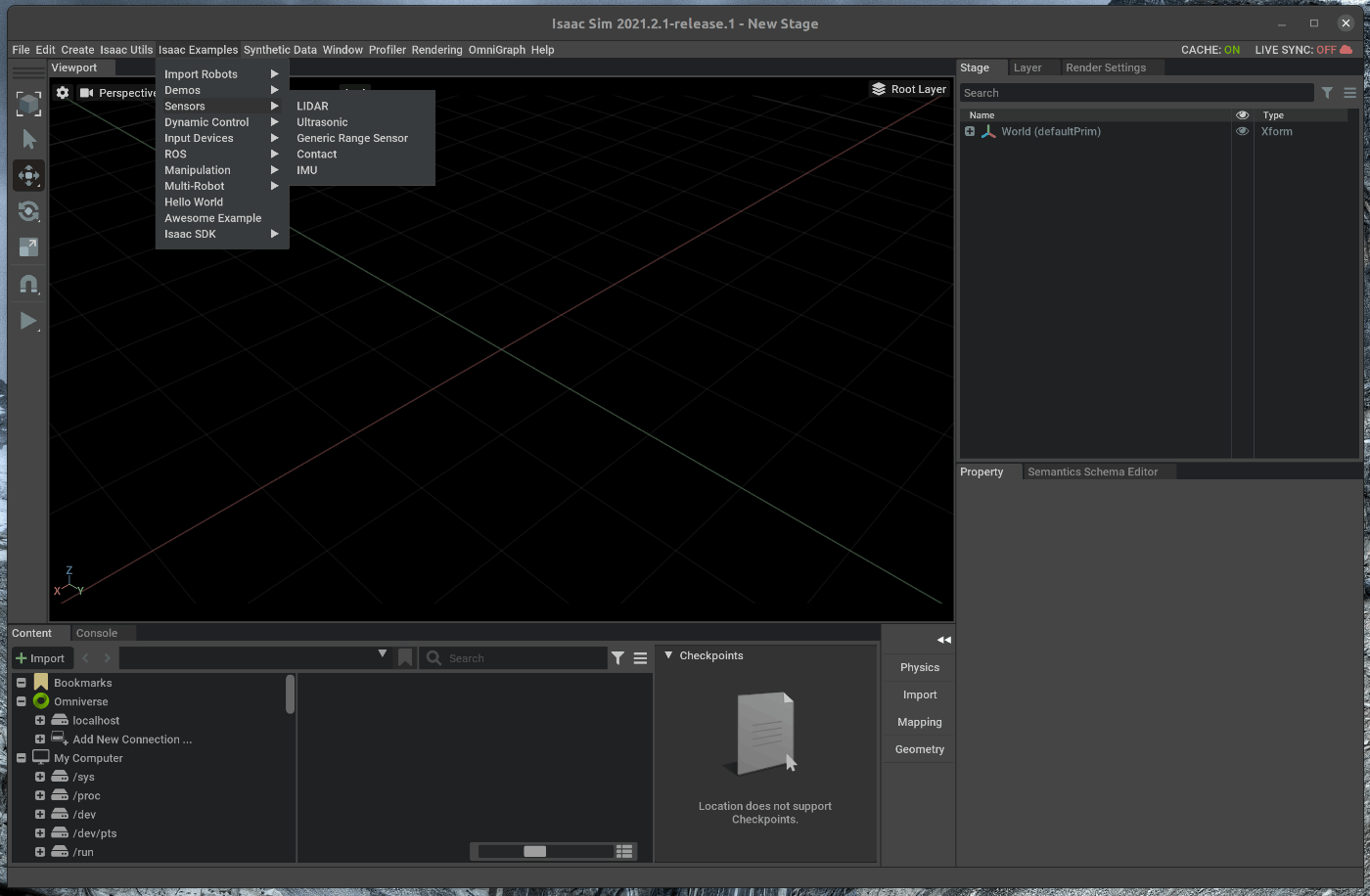
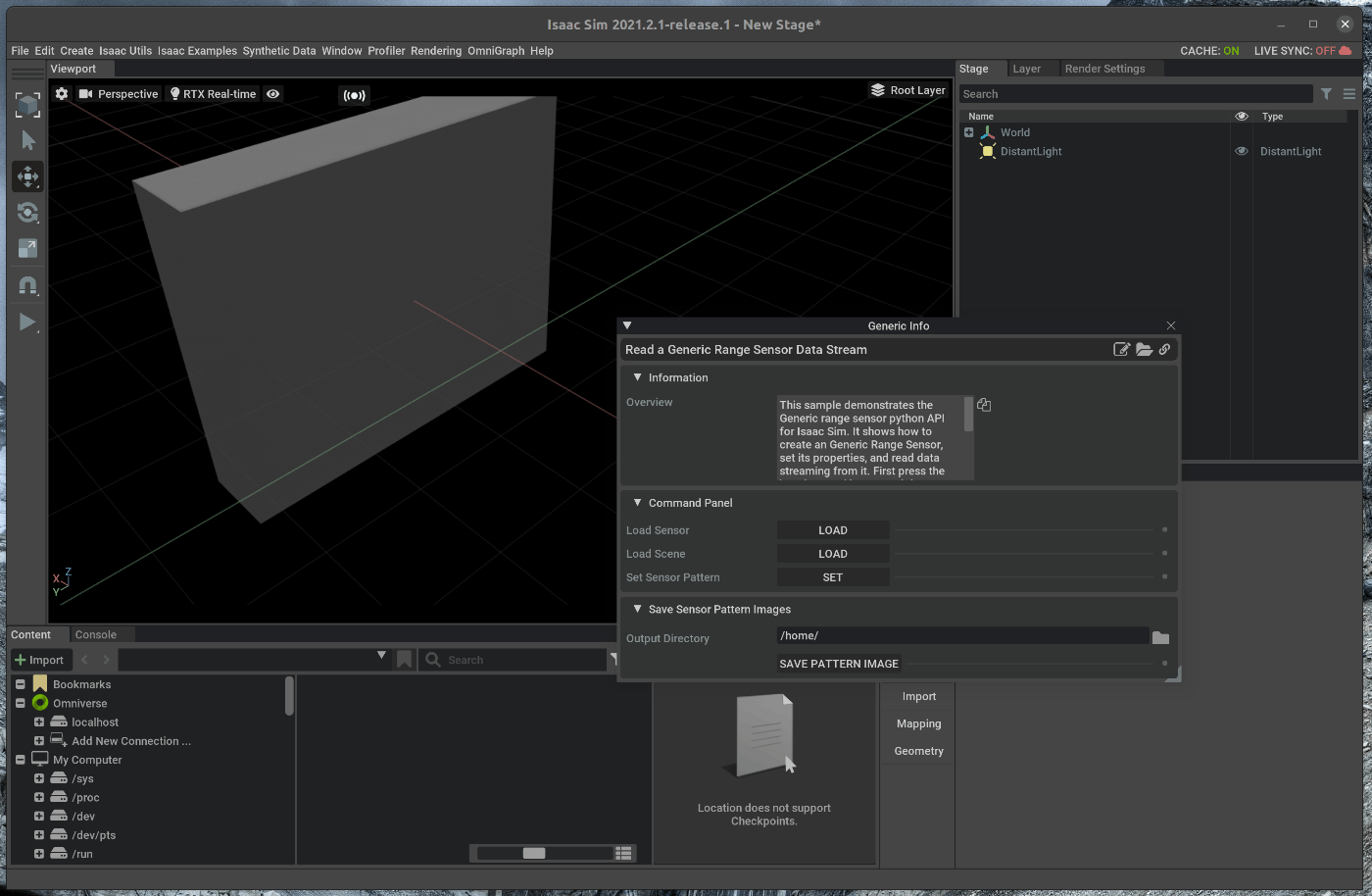
メニューバーのIsaac Examples > Sensors > Generic Range Sensorを選択します。
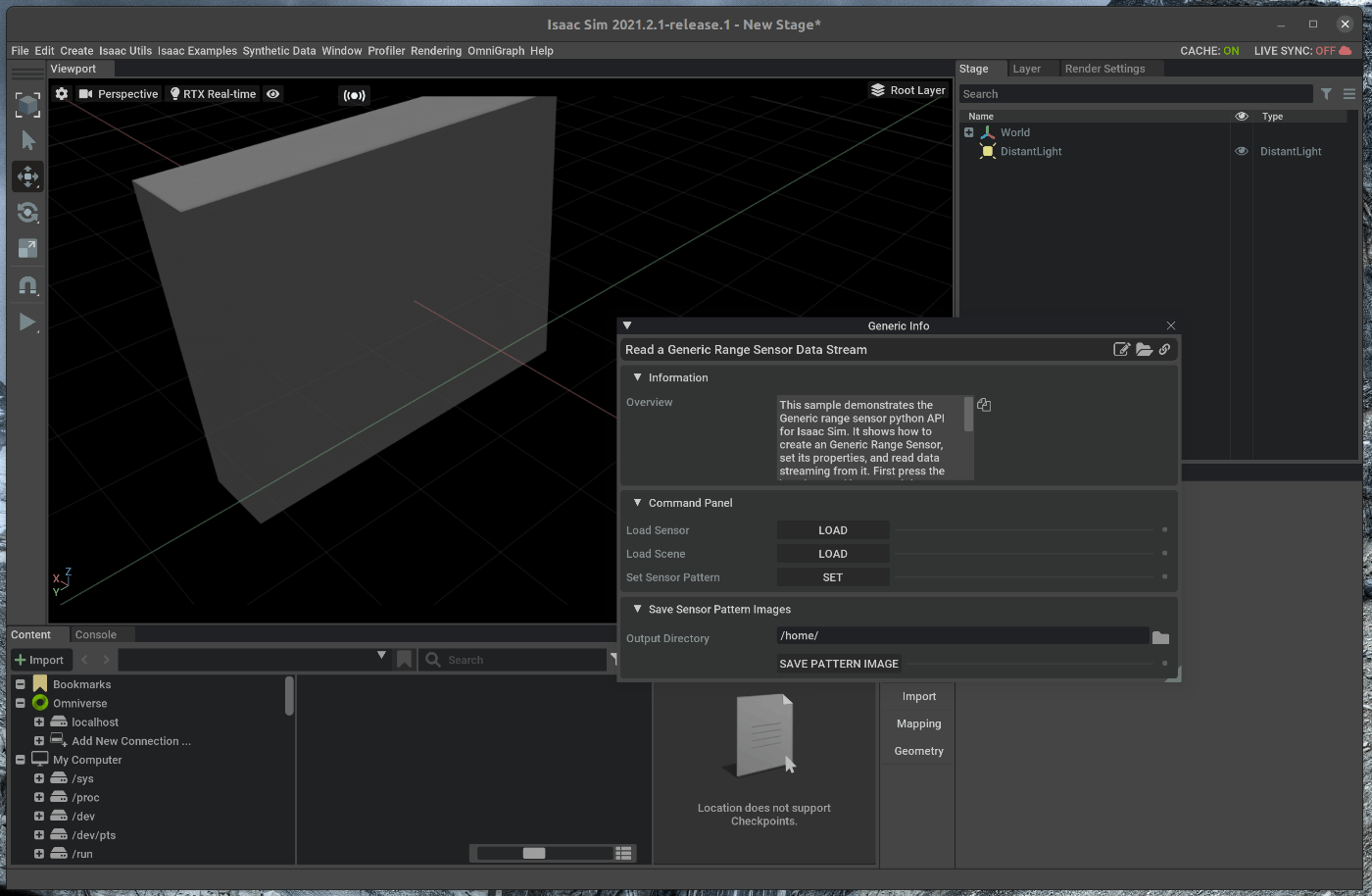
ポップアップしたWindowにおいて、"Load Sensor"を選択します。

次に、ポップアップしたWindowにおいて、”Load Scene”を選択します。

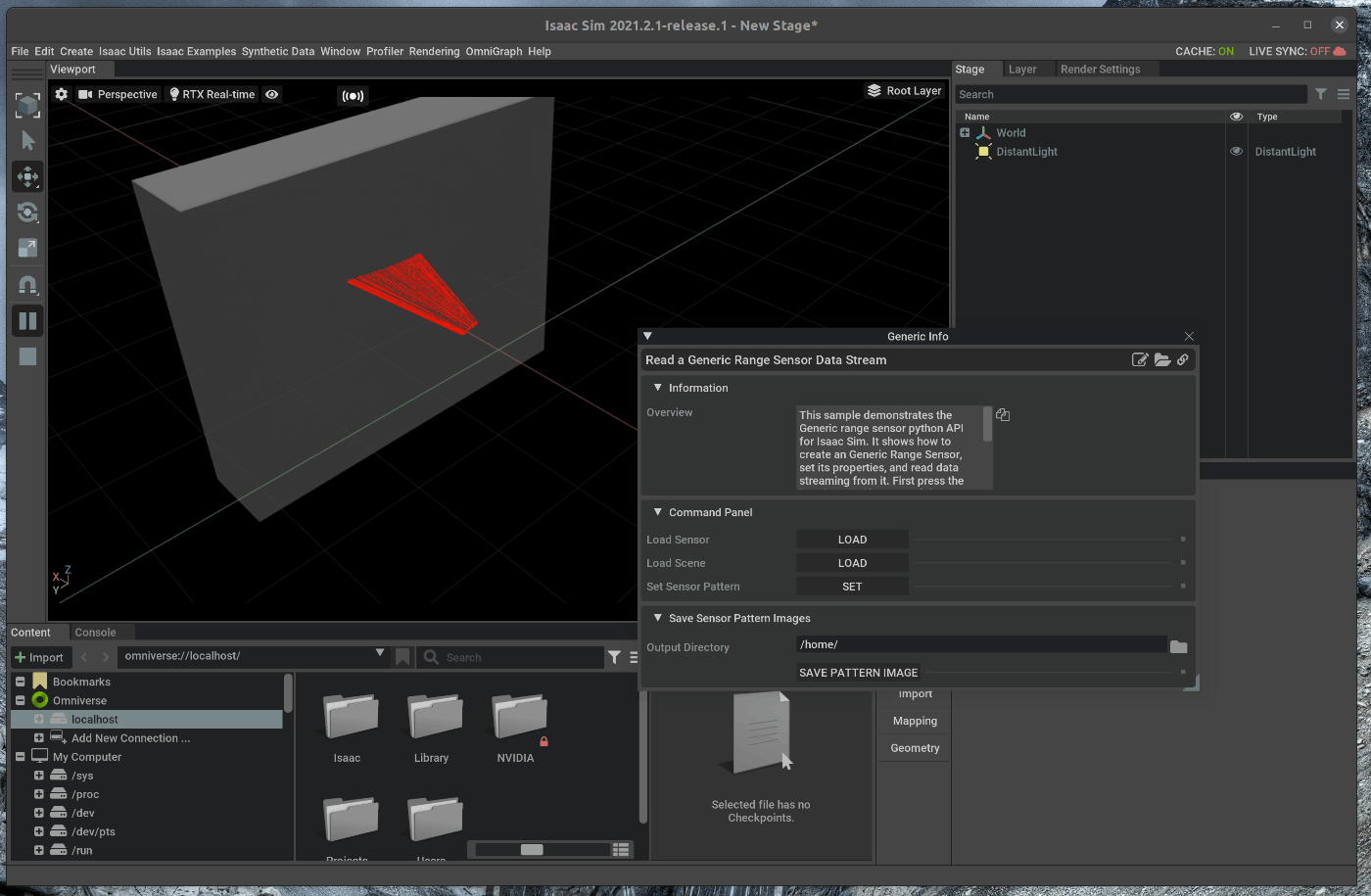
”Set Sensor Pattern”をすると、ExampleのSensor Patternが読み込まれます。
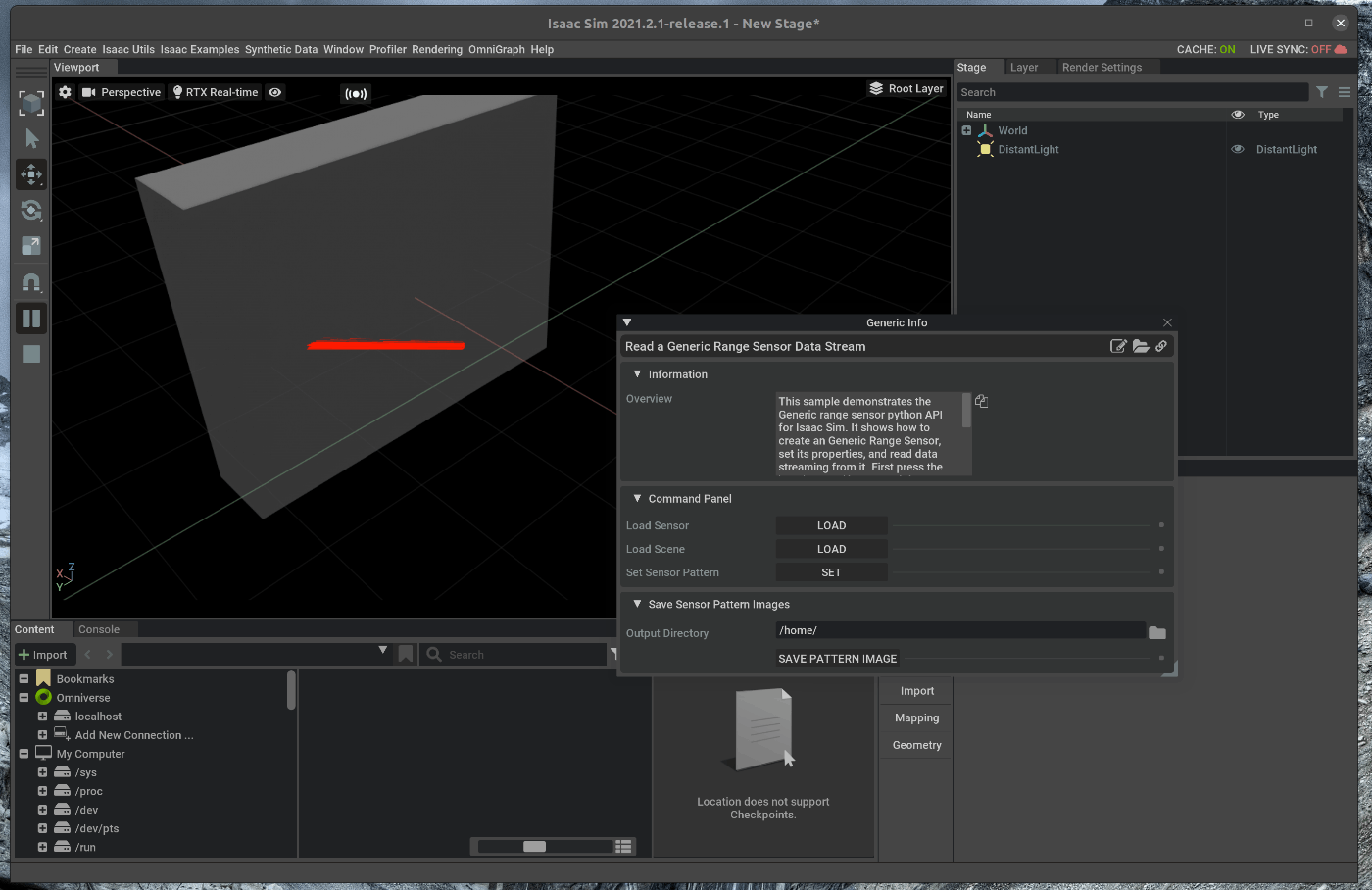
この状態で、Viewportの左側のPLAYボタンを押すと、Exampleのレーザパターンが照射されます。
2. Generic Range Sensorの設定を変更する
2.1 Generic Range Sensorのサンプルコードを開く
ポップアップしているウィンドウの右上にある3つのボタンの内、一番左側のOpen Source Codeボタンを選択します。
選択すると、がVScodeが開き、Generic Range SensorのExampleのソースコードが表示されます。

2.2 Generic Range Sensorの設定を変更する
ソースコードを変更し、レーザの照射レートを変更します。
Exampleの248行目を以下の設定に変更します。
frequency = 100
ポップアップしたWindowにおいて、"Load Sensor" > ”Load Scene” > ”Set Sensor Pattern”を順番に選択します。
この状態で、Viewportの左側のPLAYボタンを押すと、照射レートが変更されたレーザパターンが照射されます。
Discussion