NVIDIA Isaac Sim: Manipulatorの追加
概要
Adding a manipulator robotのチュートリアルを進めます。
このチュートリアルはmulti robotのチュートリアルの6部の内の4部目です。
Issac Simのtutorialに上記の内容が記載されており、この内容に沿って進めます。
実行環境
- インストール実行環境
| unit | specification |
|---|---|
| CPU | i9-11900H |
| GPU | GeForce RTX 3080 Laptop |
| RAM | 32GB |
| OS | Ubuntu 20.04.3 LTS |
- Nvidia Driverバージョン
- 510.39.01
- Issac simバージョン
- 2021.2.1
概要
Jetbotを追加したAwesome worldのExampleのソースコードに処理を追加し、シーンにFrankaを追加します。
また、シーンに追加したFrankaを用いて、CubeをPick-and-Placeするタスクを実行します。
次の手順を進めます。
- Awesome Exampleのソースコードを開く
- Frankaを追加する
1. Awesome Exampleのソースコードを開く
1.1 OmniverseからIssac Simを起動する

1.2 Awesome Exampleのソースコードを表示
メニューバーのIsaac Examples > Awesome Exampleを選択します。

次に、Awesome Examplesのウィンドウの右上にある3つのボタンの内、一番左側のOpen Source Codeボタンを選択します。

選択すると、がVScodeが開き、Hello Worldのソースコードが表示されます。

2. Frankaを追加する
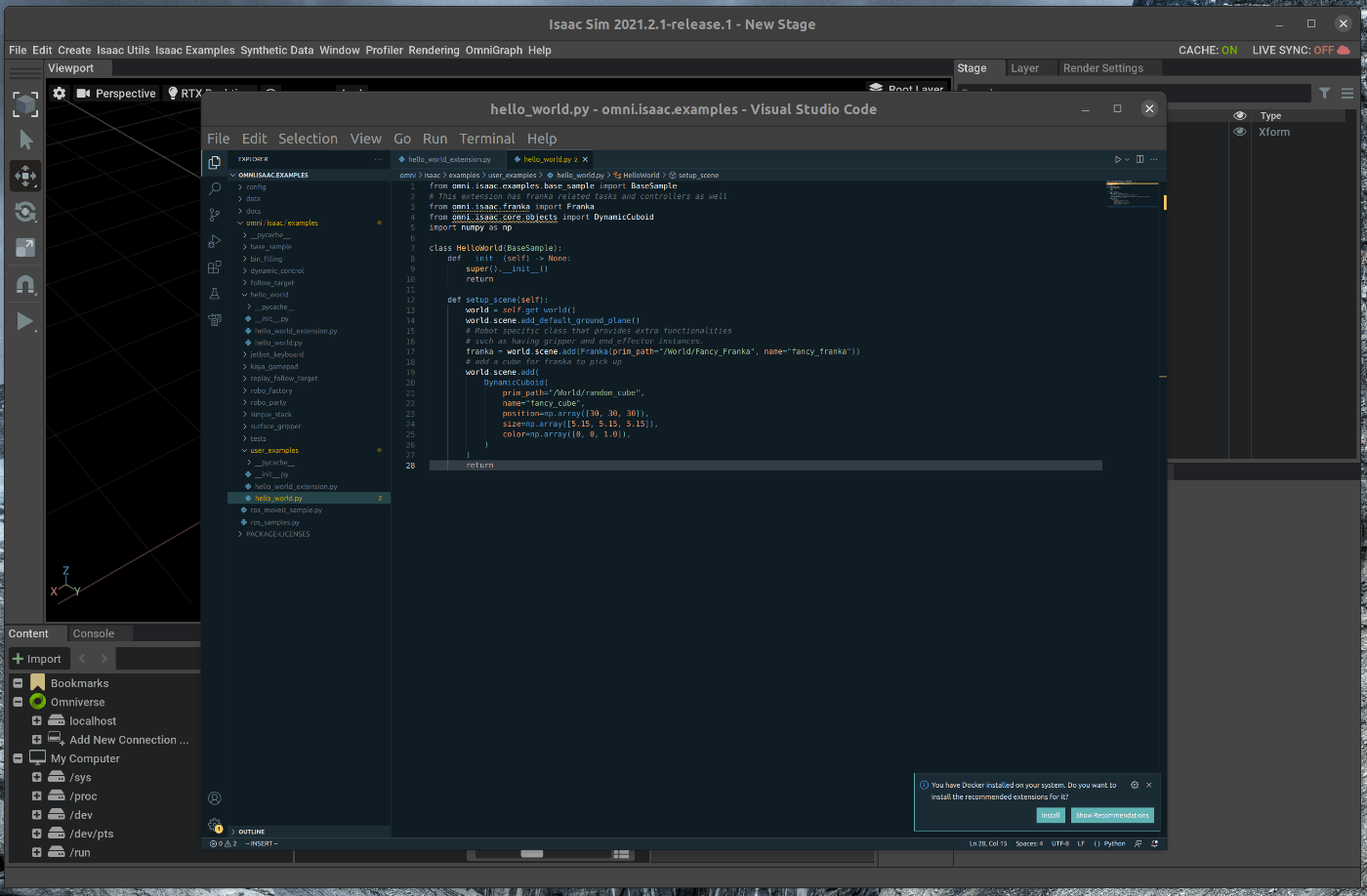
vscode上で、hello_world.pyを編集します。
2.1 Frankaの追加
シーンにFrankaを追加します。
hello_world.pyのsetup_sceneメソッドに次の処理を追加します。
from omni.isaac.examples.base_sample import BaseSample
from omni.isaac.franka import Franka
from omni.isaac.core.objects import DynamicCuboid
import numpy as np
class HelloWorld(BaseSample):
def __init__(self) -> None:
super().__init__()
return
def setup_scene(self):
world = self.get_world()
world.scene.add_default_ground_plane()
franka = world.scene.add(Franka(prim_path="/World/Fancy_Franka", name="fancy_franka"))
world.scene.add(
DynamicCuboid(
prim_path="/World/random_cube",
name="fancy_cube",
position=np.array([30, 30, 30]),
size=np.array([5.15, 5.15, 5.15]),
color=np.array([0, 0, 1.0]),
)
)
return
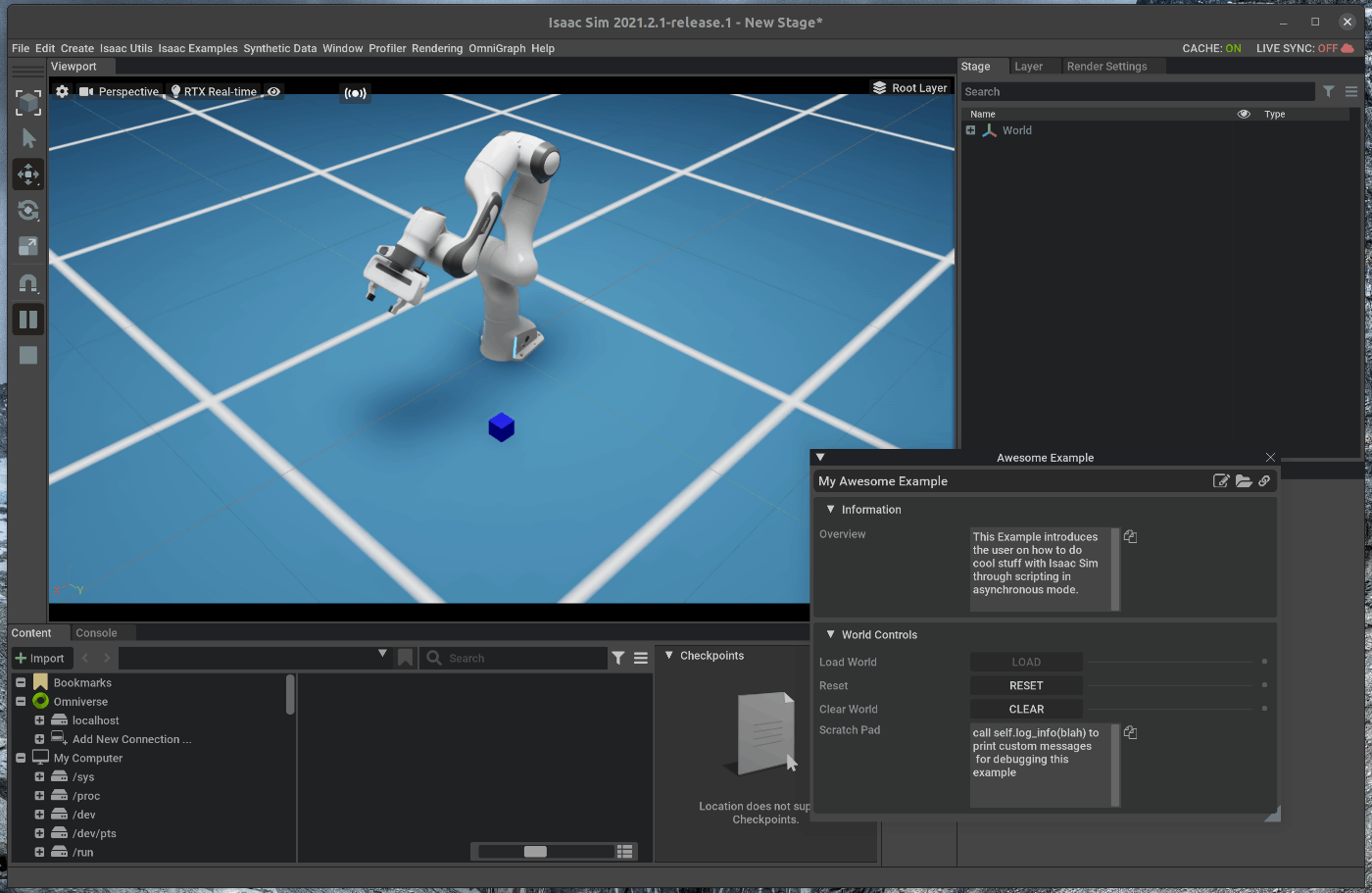
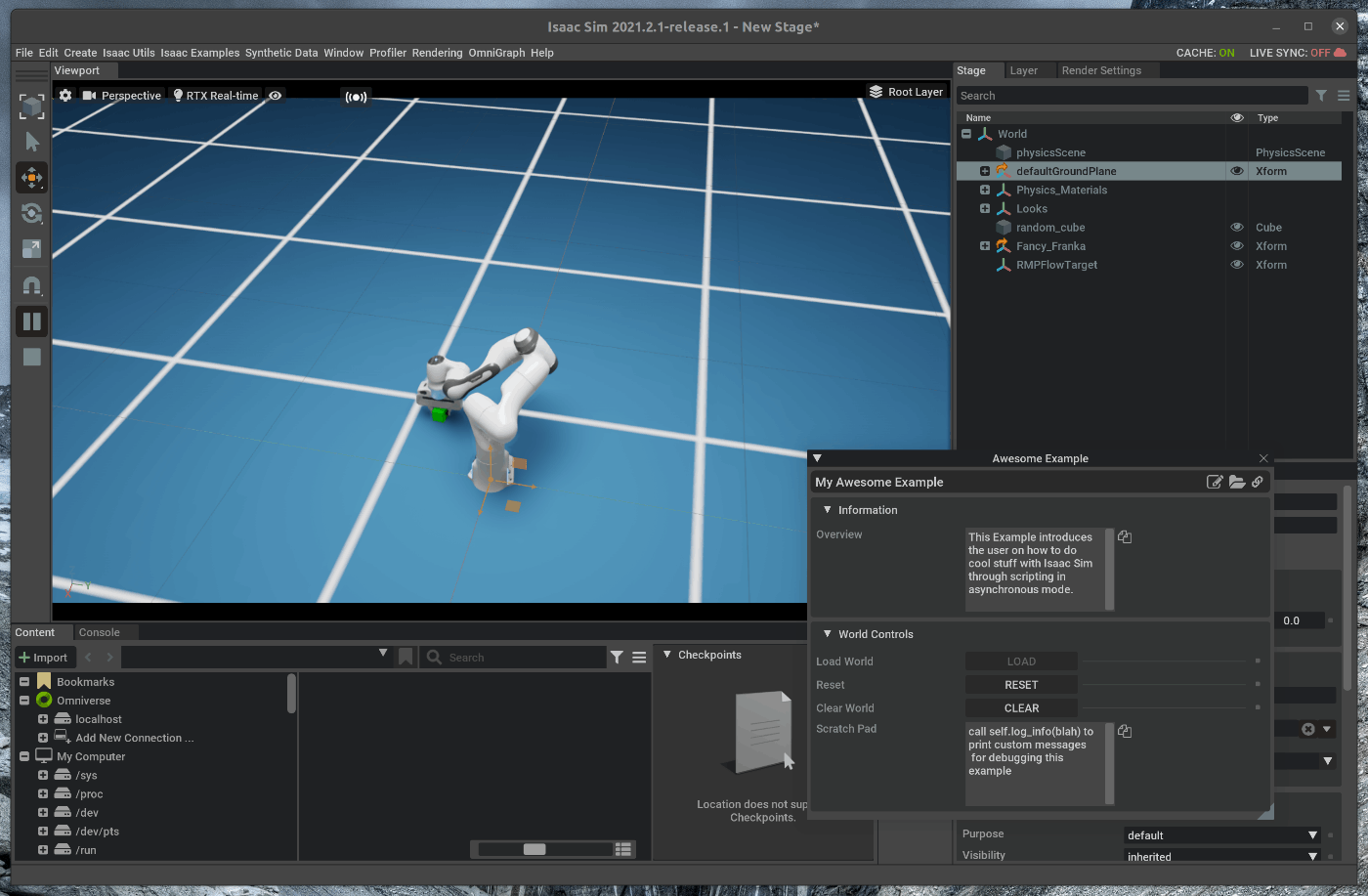
追加後、Ctrl+Saveとhot reloadが実行されます。
メニューバーのIsaac Examples > Awesome Exampleを選択し、Loadを選択すると、ソースコードの変更部分が反映された状態で表示されます。
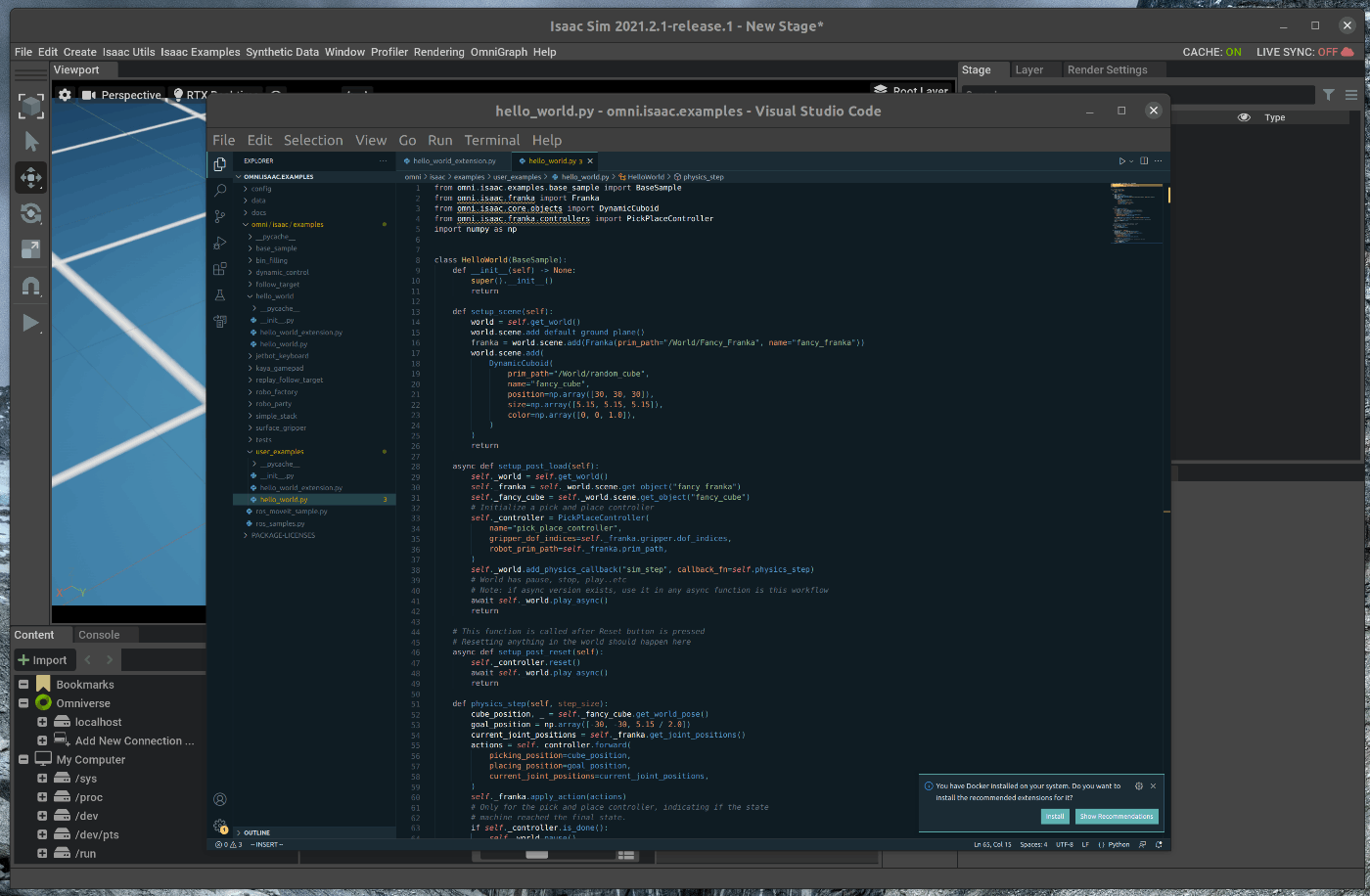
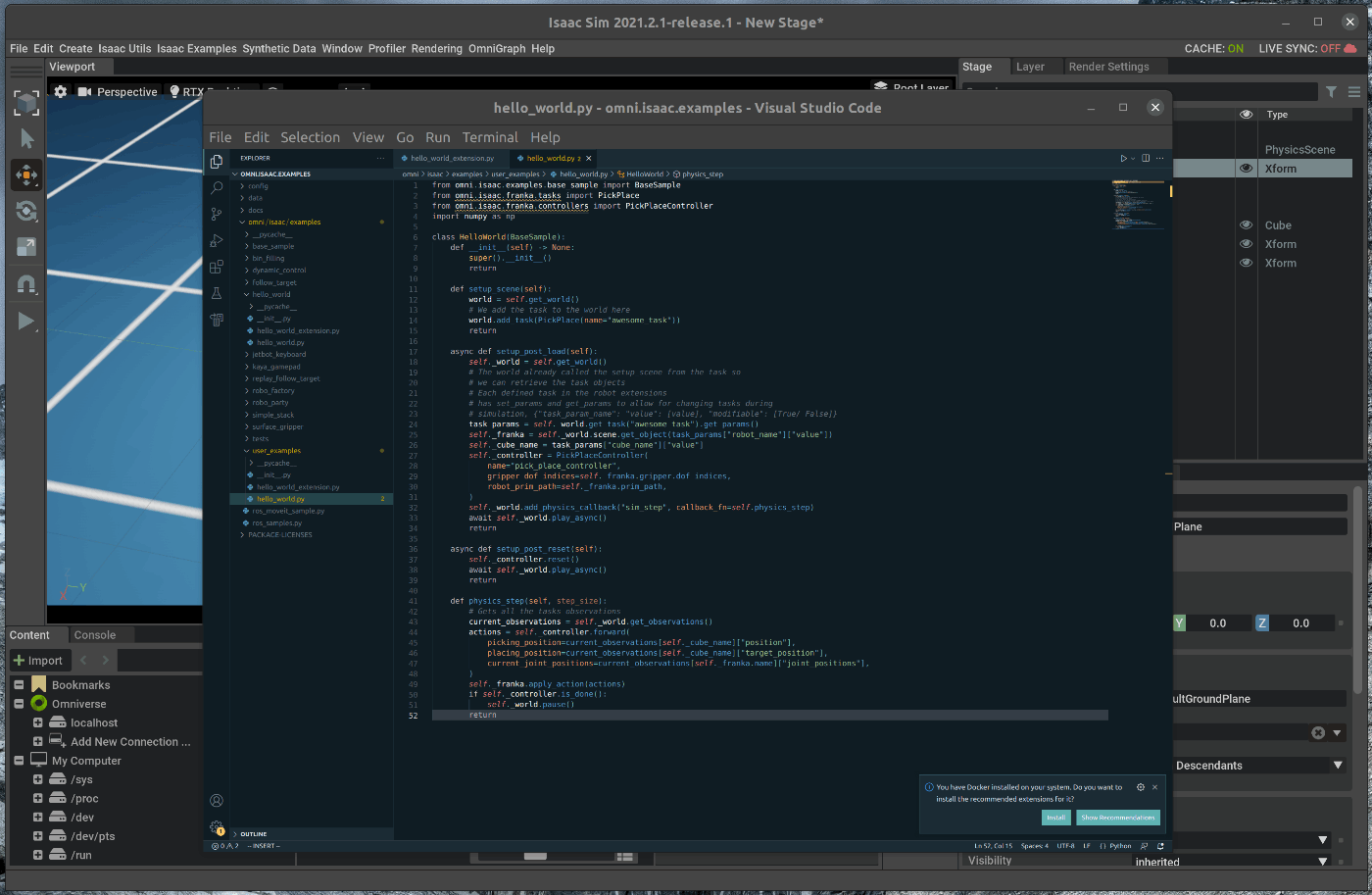
2.2 PickAndPlace Controllerの追加
FrankaのクラスのControllerに含まれているPickAndPlace Controllerを追加します。
hello_world.pyを次の様に編集します。
from omni.isaac.examples.base_sample import BaseSample
from omni.isaac.franka import Franka
from omni.isaac.core.objects import DynamicCuboid
from omni.isaac.franka.controllers import PickPlaceController
import numpy as np
class HelloWorld(BaseSample):
def __init__(self) -> None:
super().__init__()
return
def setup_scene(self):
world = self.get_world()
world.scene.add_default_ground_plane()
franka = world.scene.add(Franka(prim_path="/World/Fancy_Franka", name="fancy_franka"))
world.scene.add(
DynamicCuboid(
prim_path="/World/random_cube",
name="fancy_cube",
position=np.array([30, 30, 30]),
size=np.array([5.15, 5.15, 5.15]),
color=np.array([0, 0, 1.0]),
)
)
return
async def setup_post_load(self):
self._world = self.get_world()
self._franka = self._world.scene.get_object("fancy_franka")
self._fancy_cube = self._world.scene.get_object("fancy_cube")
self._controller = PickPlaceController(
name="pick_place_controller",
gripper_dof_indices=self._franka.gripper.dof_indices,
robot_prim_path=self._franka.prim_path,
)
self._world.add_physics_callback("sim_step", callback_fn=self.physics_step)
await self._world.play_async()
return
async def setup_post_reset(self):
self._controller.reset()
await self._world.play_async()
return
def physics_step(self, step_size):
cube_position, _ = self._fancy_cube.get_world_pose()
goal_position = np.array([-30, -30, 5.15 / 2.0])
current_joint_positions = self._franka.get_joint_positions()
actions = self._controller.forward(
picking_position=cube_position,
placing_position=goal_position,
current_joint_positions=current_joint_positions,
)
self._franka.apply_action(actions)
if self._controller.is_done():
self._world.pause()
return
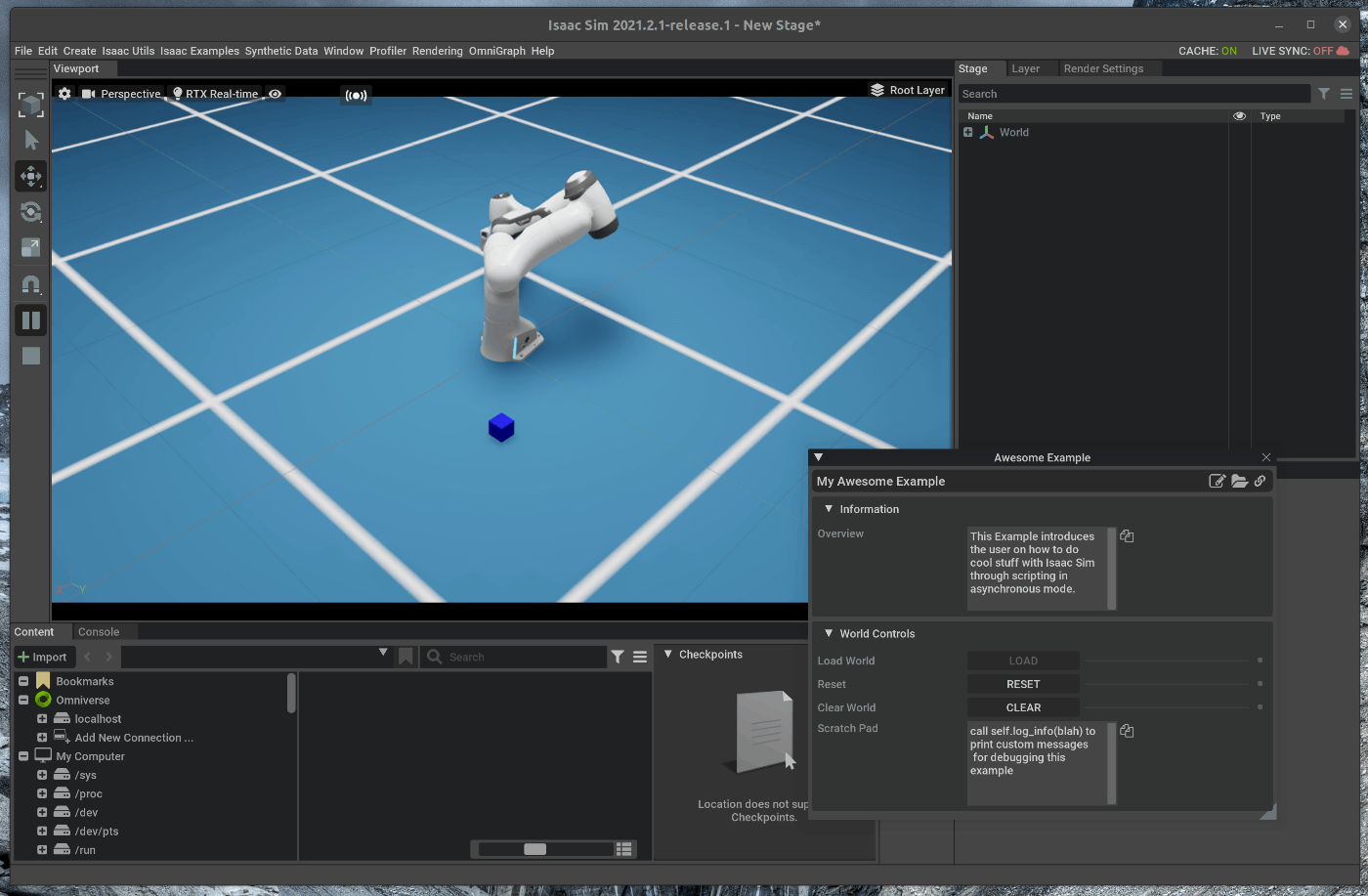
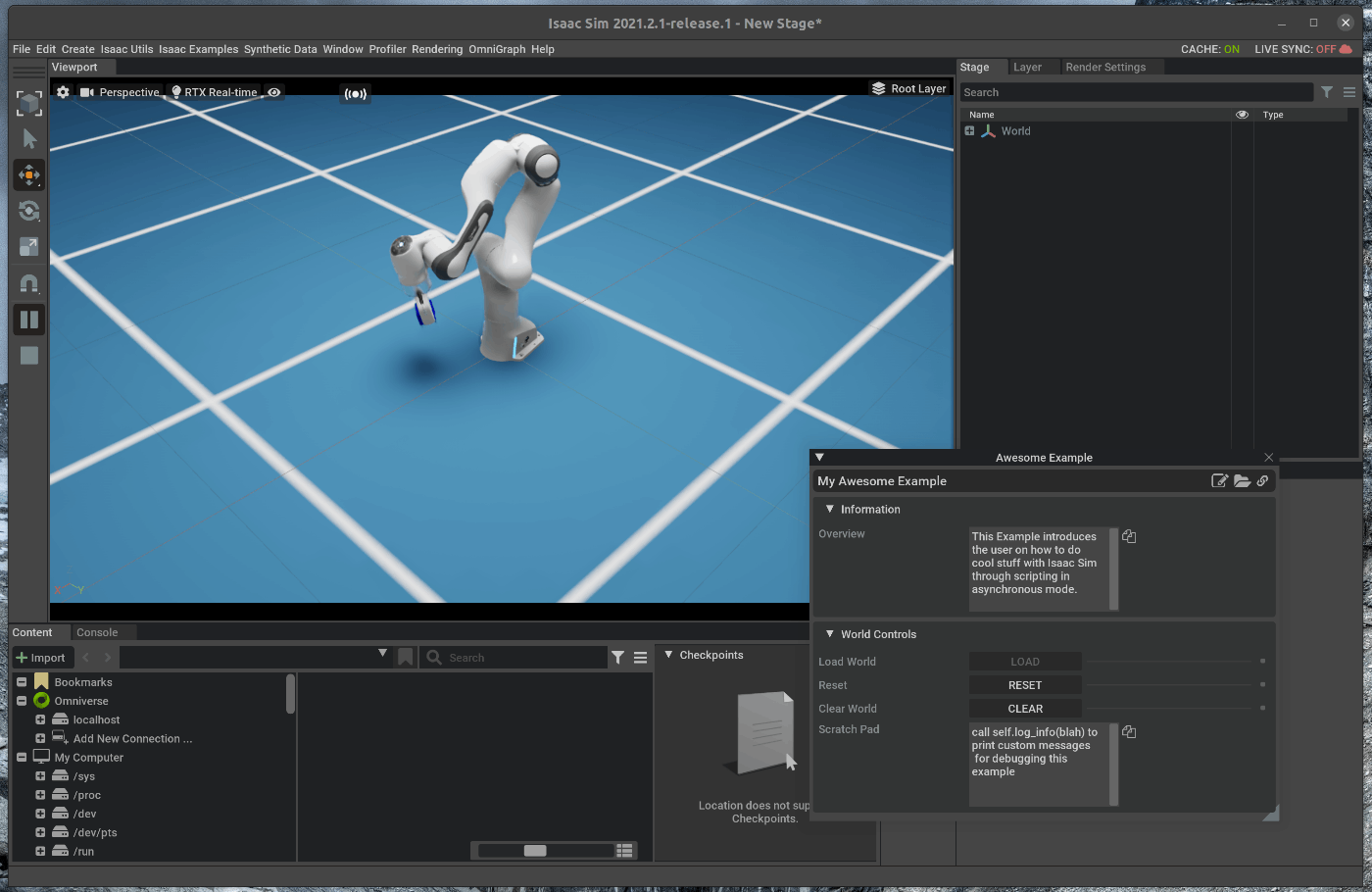
追加後、Ctrl+Saveとhot reloadが実行されます。
メニューバーのIsaac Examples > Awesome Exampleを選択し、Loadを選択すると、ソースコードの変更部分が反映された状態で表示されます。
この状態で、Viewportの左側のPLAYボタンを押すと、FrankatがCubeをPickし、Goal PositionにPlaceします。

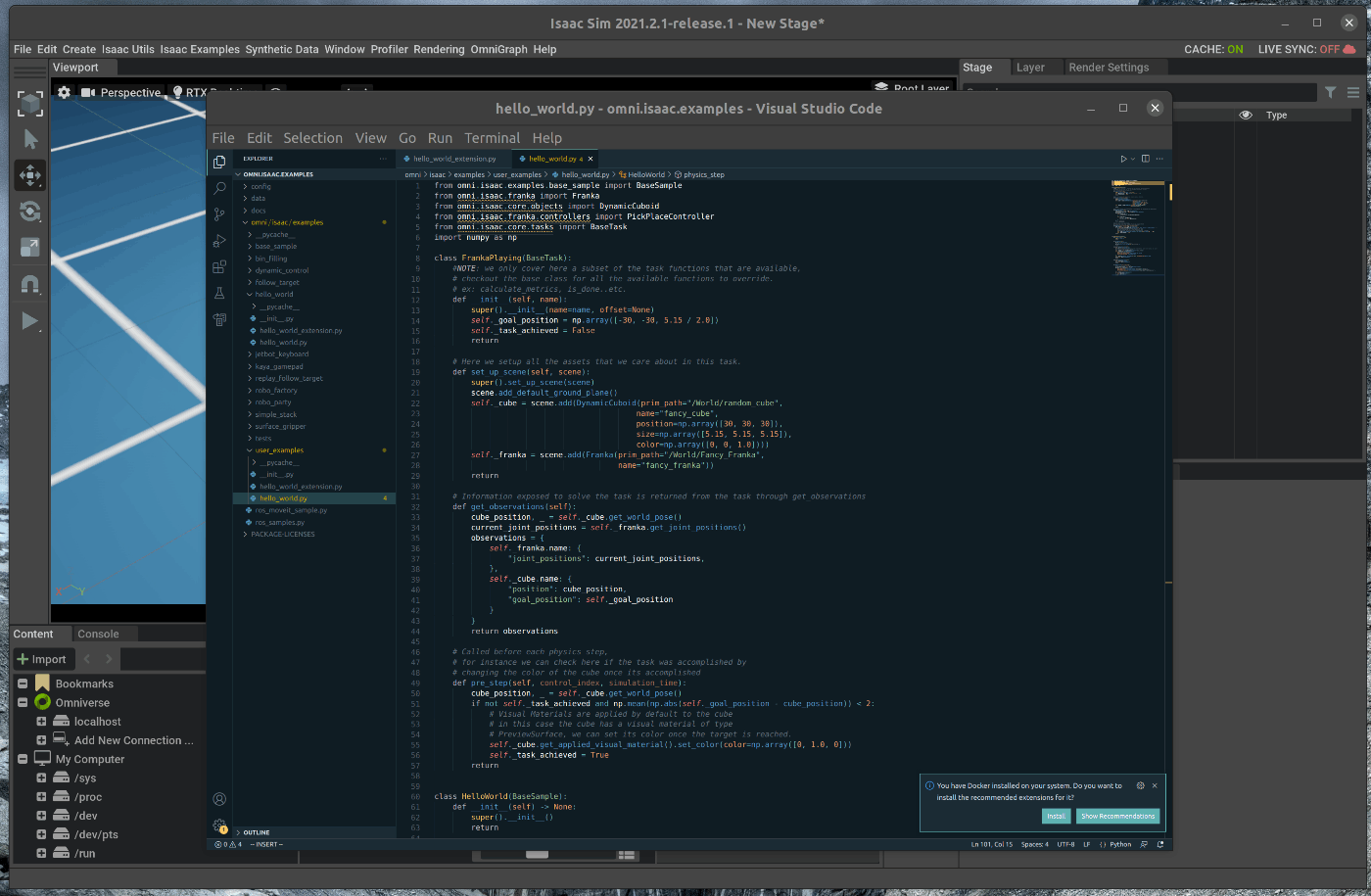
2.3 Taskクラスの使用
Isaac Simには、Taskクラスがあり、このクラスを継承したクラスを使用することによって、より複雑なシーンを表現することが可能です。
上記で示したFrakaによるPick and Placeをtaskクラスによって記述します。
hello_world.pyを次の様に編集します。
from omni.isaac.examples.base_sample import BaseSample
from omni.isaac.franka import Franka
from omni.isaac.core.objects import DynamicCuboid
from omni.isaac.franka.controllers import PickPlaceController
from omni.isaac.core.tasks import BaseTask
import numpy as np
class FrankaPlaying(BaseTask):
def __init__(self, name):
super().__init__(name=name, offset=None)
self._goal_position = np.array([-30, -30, 5.15 / 2.0])
self._task_achieved = False
return
# Here we setup all the assets that we care about in this task.
def set_up_scene(self, scene):
super().set_up_scene(scene)
scene.add_default_ground_plane()
self._cube = scene.add(DynamicCuboid(prim_path="/World/random_cube",
name="fancy_cube",
position=np.array([30, 30, 30]),
size=np.array([5.15, 5.15, 5.15]),
color=np.array([0, 0, 1.0])))
self._franka = scene.add(Franka(prim_path="/World/Fancy_Franka",
name="fancy_franka"))
return
def get_observations(self):
cube_position, _ = self._cube.get_world_pose()
current_joint_positions = self._franka.get_joint_positions()
observations = {
self._franka.name: {
"joint_positions": current_joint_positions,
},
self._cube.name: {
"position": cube_position,
"goal_position": self._goal_position
}
}
return observations
def pre_step(self, control_index, simulation_time):
cube_position, _ = self._cube.get_world_pose()
if not self._task_achieved and np.mean(np.abs(self._goal_position - cube_position)) < 2:
self._cube.get_applied_visual_material().set_color(color=np.array([0, 1.0, 0]))
self._task_achieved = True
return
class HelloWorld(BaseSample):
def __init__(self) -> None:
super().__init__()
return
def setup_scene(self):
world = self.get_world()
world.add_task(FrankaPlaying(name="my_first_task"))
return
async def setup_post_load(self):
self._world = self.get_world()
self._franka = self._world.scene.get_object("fancy_franka")
self._controller = PickPlaceController(
name="pick_place_controller",
gripper_dof_indices=self._franka.gripper.dof_indices,
robot_prim_path=self._franka.prim_path,
)
self._world.add_physics_callback("sim_step", callback_fn=self.physics_step)
await self._world.play_async()
return
async def setup_post_reset(self):
self._controller.reset()
await self._world.play_async()
return
def physics_step(self, step_size):
current_observations = self._world.get_observations()
actions = self._controller.forward(
picking_position=current_observations["fancy_cube"]["position"],
placing_position=current_observations["fancy_cube"]["goal_position"],
current_joint_positions=current_observations["fancy_franka"]["joint_positions"],
)
self._franka.apply_action(actions)
if self._controller.is_done():
self._world.pause()
return
追加後、Ctrl+Saveとhot reloadが実行されます。
メニューバーのIsaac Examples > Awesome Exampleを選択し、Loadを選択すると、ソースコードの変更部分が反映された状態で表示されます。
この状態で、Viewportの左側のPLAYボタンを押すと、FrankatがCubeをPickし、Goal PositionにPlaceします。
2.4 PickPlaceクラスの使用
また、FrankaクラスのTasksの中に、PickPlaceというクラスが存在します。
Frankaが元々持っているクラスを使用するため、ここで記述するコードは上記の2つの方法より少なくなります。
hello_world.pyを次の様に編集します。
from omni.isaac.examples.base_sample import BaseSample
from omni.isaac.franka.tasks import PickPlace
from omni.isaac.franka.controllers import PickPlaceController
import numpy as np
class HelloWorld(BaseSample):
def __init__(self) -> None:
super().__init__()
return
def setup_scene(self):
world = self.get_world()
world.add_task(PickPlace(name="awesome_task"))
return
async def setup_post_load(self):
self._world = self.get_world()
task_params = self._world.get_task("awesome_task").get_params()
self._franka = self._world.scene.get_object(task_params["robot_name"]["value"])
self._cube_name = task_params["cube_name"]["value"]
self._controller = PickPlaceController(
name="pick_place_controller",
gripper_dof_indices=self._franka.gripper.dof_indices,
robot_prim_path=self._franka.prim_path,
)
self._world.add_physics_callback("sim_step", callback_fn=self.physics_step)
await self._world.play_async()
return
async def setup_post_reset(self):
self._controller.reset()
await self._world.play_async()
return
def physics_step(self, step_size):
current_observations = self._world.get_observations()
actions = self._controller.forward(
picking_position=current_observations[self._cube_name]["position"],
placing_position=current_observations[self._cube_name]["target_position"],
current_joint_positions=current_observations[self._franka.name]["joint_positions"],
)
self._franka.apply_action(actions)
if self._controller.is_done():
self._world.pause()
return
追加後、Ctrl+Saveとhot reloadが実行されます。
メニューバーのIsaac Examples > Awesome Exampleを選択し、Loadを選択すると、ソースコードの変更部分が反映された状態で表示されます。
この状態で、Viewportの左側のPLAYボタンを押すと、FrankatがCubeをPickし、Goal PositionにPlaceします。
Discussion