NVIDIA Isaac sim: LiDARのROS Topicを発行する
概要
Isaac Sim上に配置したLiDARからのlazer_scanをros topicとして発行します。
Issac Simのtutorialに上記の内容が記載されており、この内容に沿って進めます。
実行環境
- インストール実行環境
| unit | specification |
|---|---|
| CPU | i9-11900H |
| GPU | GeForce RTX 3080 Laptop |
| RAM | 32GB |
| OS | Ubuntu 20.04.3 LTS |
- Nvidia Driverバージョン
- 510.39.01
- Issac simバージョン
- 2021.2.1
手順
Isaac Sim上に配置したLiDARからのlazer_scanをros topicとして発行します。
シーンファイルとして、Turtlebotを追加したシーンファイルを使用します。
シーンファイルはこちらからダウンロードできます。
- シーンのロード
- ROS LiDARの追加
- Topicの確認
1. シーンのロード
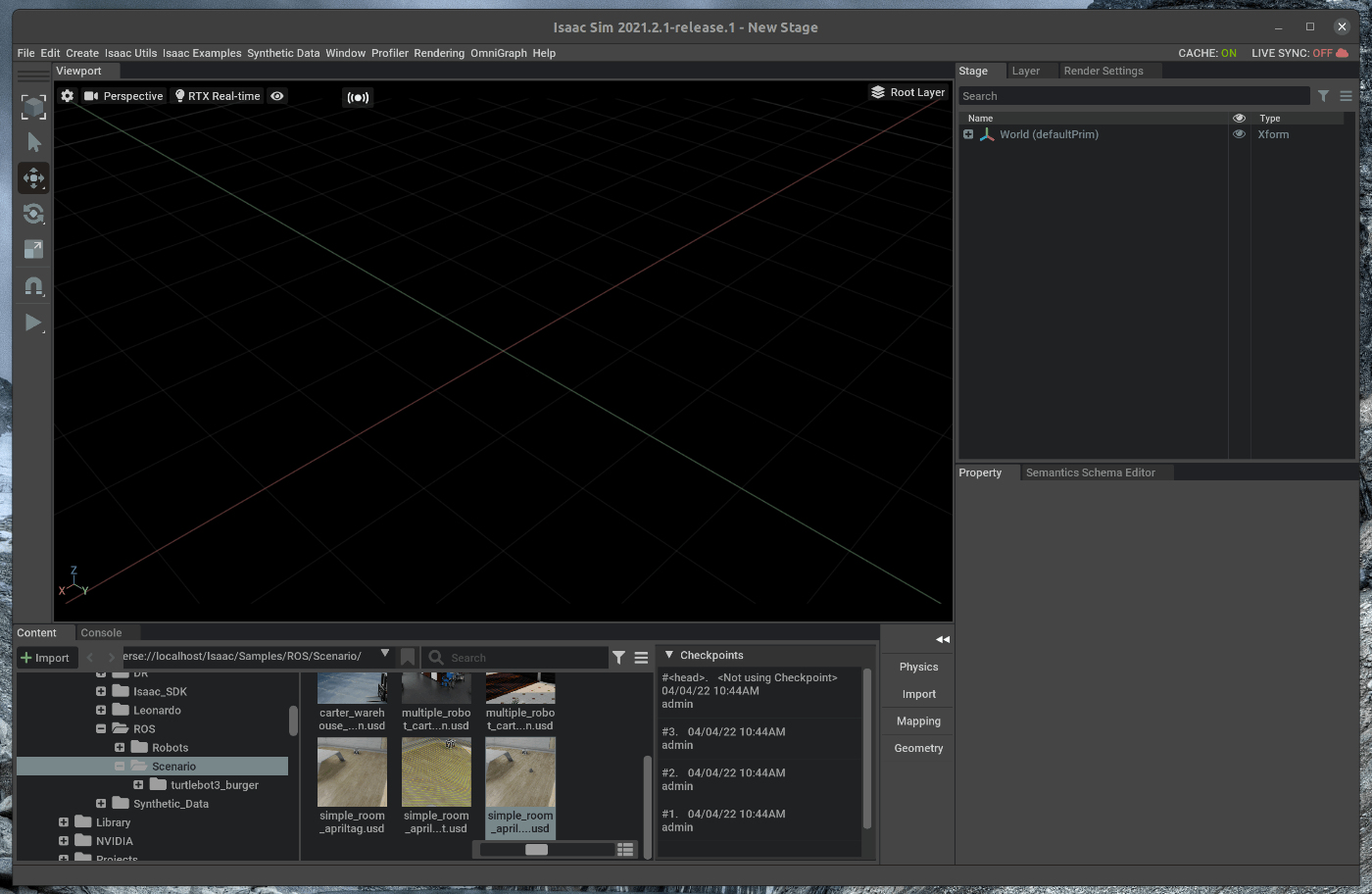
1.1 OmniverseからIssac Simを起動する

1.2 シーンをロードする
Isaac Simの下部にあるContentの中から、”ダウンロードしたディレクトリ” > simple_room_apriltag_with_camera.usdをダブルクリックします。

2. ROS LiDARの追加
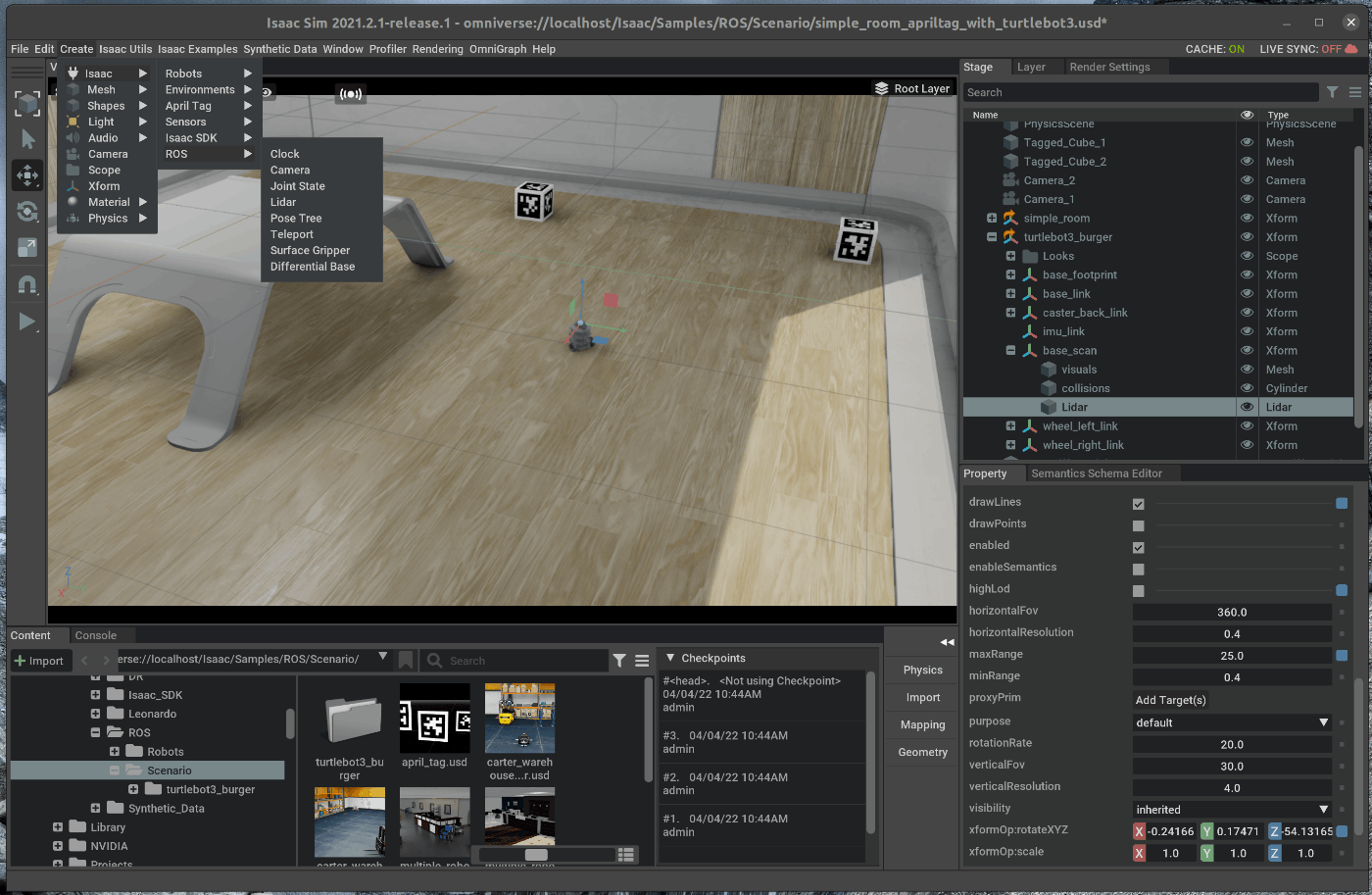
2.1 LiDARを追加する
メニューバーのCreate > Isaac > Sensors > Lidar > Rotatingを選択します。

右側のStageの中で追加したLiDARをWorld > turtlebot3_burger > base_scanの下にドラッグアンドドロップします。

右側のStageの中で追加したLiDARを選択します。
Stage下部のTransformの値を次の通りに変更します。
- translateのXを0.0にする
- translateのYを0.0にする
- translateのZを0.0にする

Stage下部のpropertyのRaw USD propertiesを開きます。
設定値の中で次の値を変更します。
- maxRangeに25を設定します
- drawLinesにチェックを入れる

この状態で、Viewportの左側のPLAYボタンを押すと、LiDARのレーザ光が出力されます。

2.2 ROS LiDARを追加する
メニューバーのCreate > Isaac > ROS > Lidarを選択します。
右側のStageの中で、追加したROS_LiDARを選択します。
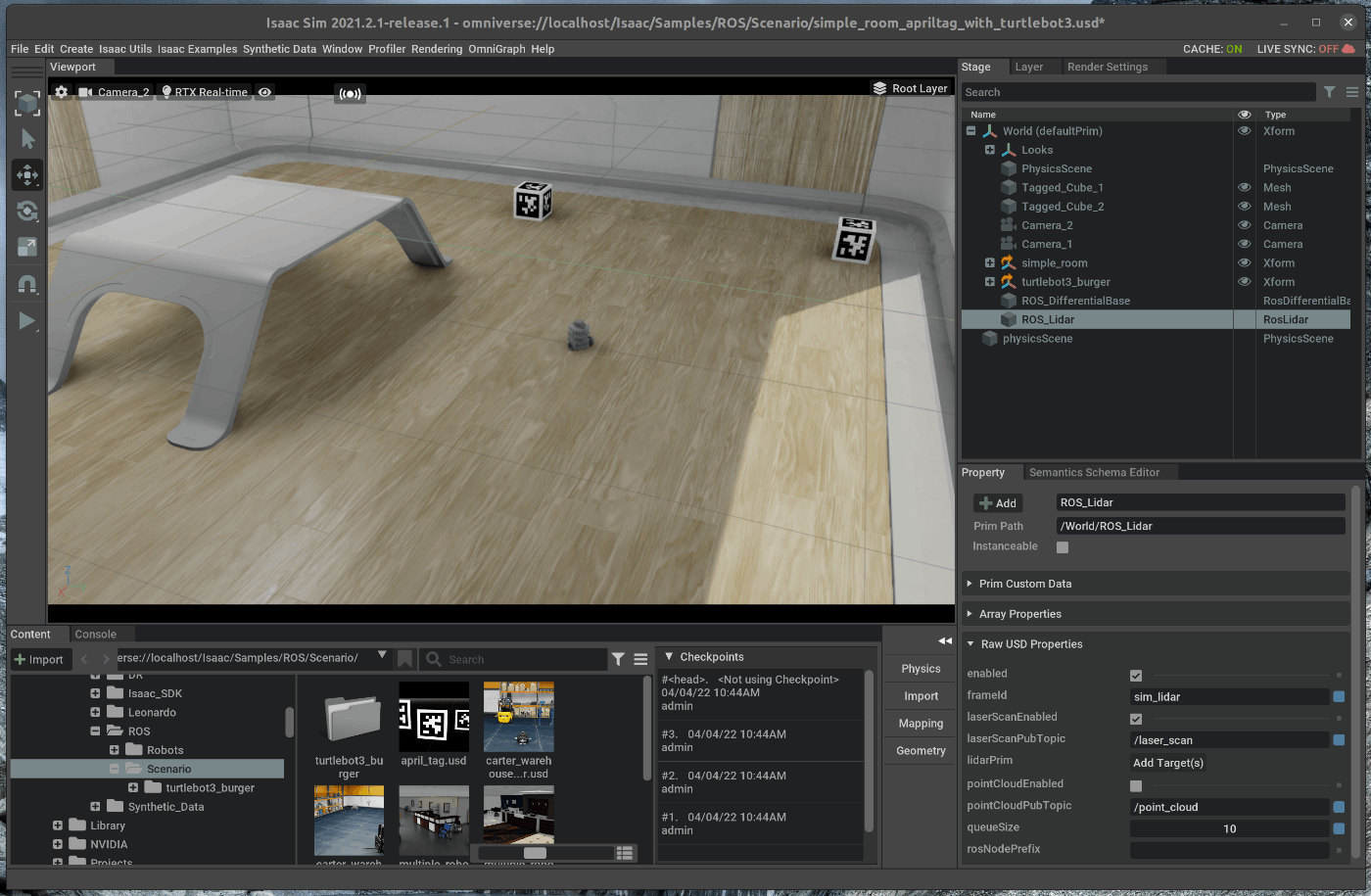
選択した状態で、Stage下部のpropertyのRaw USD propertiesを開きます。
Raw USD propertiesの中で、lidarPrimを選択し、Stageの中の/world/turtlebot3_burger/base_scan/Lidarを選択します。

設定値の中で次の値を変更します。
- pointCloudEnabledにチェックを入れる
- lazerScanEnabledにチェックを入れる

また、ROS Camera、ROS Camera_1, ROS_LIDARのRaw USD propertiessのframeIdを”turtle”に変更します。
3. Topicの確認
新たにterminalを開き、roscoreを起動します。

この状態で、Viewportの左側のPLAYボタンを押すと、各種topicが発行されます。

また、新たにterminalを開き、次のコマンドを入力します。
$ cd ~/.local/share/ov/pkg/isaac_sim-2021.2.1/ros_workspace/
$ rosdep install -i --from-paths ./src/
$ caktin b
$ source devel/setup.bash
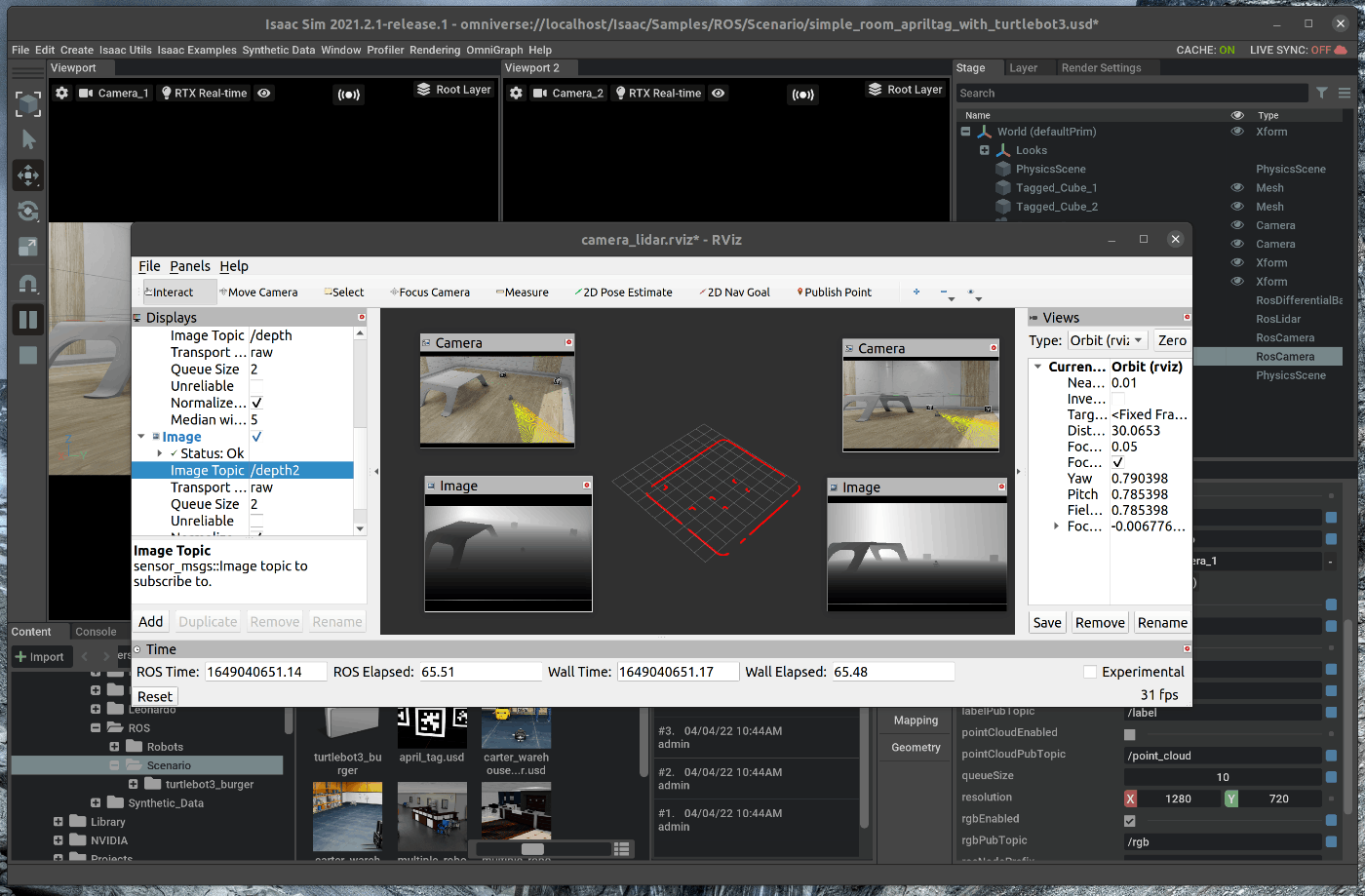
$ rviz -d src/isaac_tutorials/rviz/camera_lidar.rviz
rvizにカメラとLiDARから取得できる情報が表示されます。
Discussion