太陽光発電システムと鉛蓄電池充電の基礎と実践
1. はじめに:太陽光発電システムにおける電力最適化の重要性
太陽光発電システムにおいて、太陽光から得られた電力を最大限に効率良く蓄電池へ充電することは、システム全体の性能と経済性を左右する。この目的を達成するためには、太陽光パネルの発電特性の理解と、蓄電池、特に鉛蓄電池の適切な充電管理が不可欠となる。
本記事では、まず太陽光パネルの基本的な電気特性と、電力最適化の目標である最大電力点について解説する。次に、蓄電池(特に鉛蓄電池)の充電特性と、その保護の重要性を詳述する。これらの基礎を踏まえ、DC-DCコンバータがどのようにして太陽光パネルの発電点を制御し、MPPTアルゴリズムと連携してシステム全体の効率を最大化するのかを、メカニズムと主要な制御方式に焦点を当てて考察する。
2. 太陽光パネルの電気的特性と最大電力点
太陽光パネルは、入射する太陽光の強度やパネルの温度だけでなく、接続される電気負荷の特性によって、その出力電圧と電流が変化する非線形な特性(電流-電圧、IV特性)を示す光電変換デバイスである。

図2.1. 太陽光パネルの典型的なIV特性曲線

図2.2. 太陽光パネルの典型的なPV特性曲線
-
開放電圧 (
V_{oc} -
短絡電流 (
I_{sc} -
最大電力点 (MPP: Maximum Power Point): IV曲線上で、出力電力 (
P = V \times I V_{mpp} I_{mpp}
この図が示すように、太陽光パネルのIV特性曲線には、出力電力が最大となる固有の点、すなわち最大電力点 (MPP) が存在する。太陽光発電システムにおいては、常にパネルをこのMPPで動作させることが、発電効率を最大化する上で最も重要な目標となる。
表2.1. 負荷条件と太陽光パネル出力の関係
| 負荷条件 | パネル電圧 ( |
パネル電流 ( |
出力電力 ( |
|---|---|---|---|
| 軽すぎる負荷 | 高い ( |
非常に少ない | 低い |
| 重すぎる負荷 | 非常に低い ( |
多い | 低い |
| 最適負荷 (MPP) | 最適な電圧 ( |
最適な電流 ( |
最大 |
3. 蓄電池の充電特性と保護の重要性
太陽光発電システムにおいて、蓄電池(特に鉛蓄電池)の充電特性および適切な保護管理は、システム性能と電池の長寿命化を確保するために不可欠である。本節では鉛蓄電池を対象として、その充放電特性および適切な管理方法について体系的に整理する。
3.1. 鉛蓄電池の基本充電特性と電流決定メカニズム
鉛蓄電池は充放電中に比較的安定した端子電圧(12V系で約12.0V~14.7V程度)を維持する特性を持つ。蓄電池への充電は、充電器(DC-DCコンバータ)の出力電圧(
この式から、DC-DCコンバータの出力電圧(
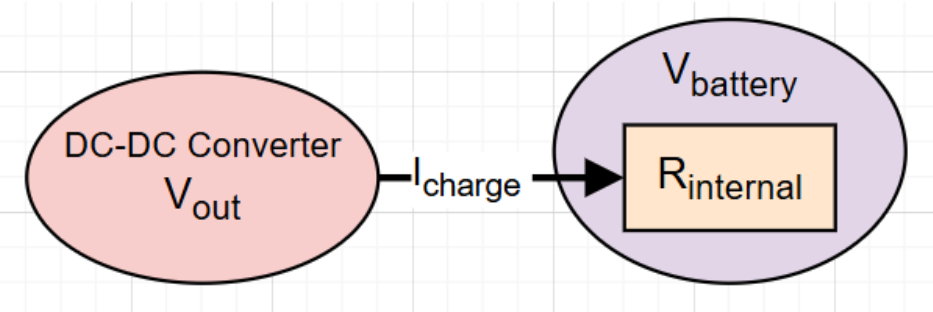
図3.1. 蓄電池充電における等価回路モデル(概念図)
3.2. Cレートによる充電電流制限
蓄電池の充電電流は、その定格容量(Ah)に対する比率で表される「Cレート」を用いて制限される。例えば、10Ahの蓄電池に0.2Cで充電するとは、2Aの電流で充電することを意味する。鉛蓄電池の一般的な推奨充電電流は、0.1C〜0.3Cの範囲である。この範囲を超過した充電電流は、蓄電池の寿命を短縮させる主要因となる。
3.3. 鉛蓄電池の充電段階
鉛蓄電池の充電は、一般的に以下の3つの段階を経て行われる。
表3.2. 鉛蓄電池の一般的な充電段階と制御目標
| 充電段階 | 制御方式 | 詳細 | 終了条件 |
|---|---|---|---|
| バルク充電 | 定電流(CC) | 最大許容電流(0.1~0.3C)で充電 | 電圧が指定値(例:14.4V)に到達 |
| 吸収充電 | 定電圧(CV) | 一定電圧を維持し徐々に電流低下 | 電流が一定値(例:0.01C)に減少 |
| フロート充電 | 定電圧(CV) | 満充電維持のため自己放電分を補充 | 常時維持 |
3.4 鉛蓄電池の放電特性
鉛蓄電池は、放電時における電流値および温度の影響を強く受ける。特に、高負荷放電時の端子電圧降下と容量減少(ペクール効果)は、太陽光発電と組み合わせる際に無視できない特性である。
放電電流の影響(ペクール効果)
| 放電レート(C) | 電流(10Ah例) | 実効容量(Ah) | 放電時間 |
|---|---|---|---|
| 0.05C | 0.5A | ≒10Ah | 20時間 |
| 0.1C | 1A | ≒9.5Ah | 9.5時間 |
| 0.2C | 2A | ≒9.0Ah | 4.5時間 |
| 0.5C | 5A | ≒8.0Ah | 1.6時間 |
| 1C | 10A | ≒7.0Ah | 0.7時間 |
「横軸:時間、縦軸:端子電圧。各Cレートごとの電圧降下曲線を重ねることで、容量差と降下速度を視覚化。」
図3.2: Cレート別放電曲線(電圧 vs 時間)
温度の影響
低温では、反応速度の遅れと電解液の粘性上昇により、容量の一部しか取り出せない。25℃を基準にすると、0℃では20〜30%容量が減少するケースがある。
運用例:
- センサ駆動用12V/5W機器を0.5Aで連続使用 → 9V以下に電圧が落ちないよう放電レートは0.1C以下が望ましい
- 夜間や曇天時に3A負荷を3時間持たせる → 9Ah以上の実効容量が必要 → 0.3C以下で運用設計すべき
3.5 放電深度(DOD)管理の重要性
DOD(Depth of Discharge)とは、蓄電池の満充電容量に対して何%放電されたかを示す。DODは鉛蓄電池の寿命および信頼性に直結するため、設計段階で十分な考慮が必要である。
DODと寿命の関係
| DOD(%) | 期待サイクル寿命 | 寿命目安(10年運用時) | 備考 |
|---|---|---|---|
| 20 | 1500~2000回 | ≒ 毎日充放電で5~6年 | 非常に長寿命設計 |
| 50 | 700~1000回 | ≒ 2~3年 | 一般的な目安 |
| 80 | 300~500回 | ≒ 1~2年 | 推奨上限 |
| 100 | 100~200回 | 数ヶ月~1年 | 繰り返し不可推奨 |
横軸:DOD(%)、縦軸:寿命(回数)。指数関数的な劣化傾向を明示。
図3.3: DOD vs サイクル寿命
実用上のDOD管理指針
-
通常運用時:
DODを30〜50%に抑えることで、性能と寿命のバランスが取れる -
長寿命設計を重視する場合:
DODを20〜30%に制限し、過放電防止回路(LVP)と組み合わせて劣化を最小限に -
非常時(曇天・災害時):
DOD最大80%まで許容。ただし頻度を抑え、連続使用は避ける設計が望ましい
運用例:
-
定期使用システム(例:監視カメラ)
1日1回、DOD 50%で放電
→ 約3年で容量劣化が顕著になるため、3〜4年ごとの更新計画が必要 -
農業IoT(露地センサ用)
通常はDOD 30%以下で間欠運用
→ 3日間曇天が続いた場合にDOD 80%へ達する構成
→ 通常時に劣化を抑えつつ、非常時も電力供給を維持可能
3.6 蓄電池保護管理(BMS)の重要性
鉛蓄電池を適切に運用するためには、過充電保護・過放電保護・温度監視機能を含むBMS(Battery Management System)が必須である。
| 保護機能 | 概要 | 保護例 |
|---|---|---|
| 過充電保護 | 最大電圧を制限 | 設定電圧以上で充電電流を停止 |
| 過放電保護 | 最低電圧を制限 | 設定電圧以下で負荷を遮断 |
| 温度保護 | 電池温度監視 | 温度が設定範囲外の場合充電電流を制限 |
4. 充電コントローラの必要性:なぜ直結では不十分か?
太陽光パネルと蓄電池を直接接続するだけでは、効率的な充電も、蓄電池の適切な保護も実現できない。むしろ、以下のような問題が生じ、システムの性能低下や安全上のリスクを招く。
表4.1. 太陽光パネルと蓄電池の常時直結における問題点
| 状態 | ソーラーパネルへの影響 | 蓄電池への影響 | システム全体の問題点 |
|---|---|---|---|
| 日中充電時 | 蓄電池電圧にパネル電圧が引きずられ、MPPから外れる | 蓄電池容量に関わらず、パネルの最大電流が流れ込む | 発電効率が著しく低下 (30-40%以上の損失) |
| 満充電後 | 引き続き低電圧で動作 | 過充電(発熱、ガス発生、電解液減少、電極劣化) | 蓄電池の寿命短縮、安全リスク増大 |
| 夜間 | 発電しない | 蓄電池からパネルへの電流逆流(自己放電) | 蓄電池残量の不要な減少、逆流防止ダイオードがない場合 |
これらの問題から、太陽光発電システムには、太陽光パネルの発電を最適化し、かつ蓄電池を適切に保護するための充電コントローラが不可欠であることが理解される。
5. 充電コントローラの二つの主要方式:PWMとMPPT
充電コントローラには、主に「PWM方式」と「MPPT方式」の二種類が存在する。これらは太陽光パネルの電力利用効率とシステムコストにおいて対照的な特性を持つ。
表5.1. PWM方式とMPPT方式の比較
| 項目 | PWM方式 | MPPT方式 |
|---|---|---|
| 原理 | パネルと蓄電池をON/OFFで直接接続し、デューティ比で平均電流を調整。 | DC-DCコンバータでパネルの動作点を最適化し、高効率で電力変換。 |
| 回路構成 | シンプル | 複雑 |
| コスト | 低 | 高 |
| パネル動作点 | 蓄電池電圧に拘束される(MPPから離れる) | 常にMPPに追従する |
| 発電効率 | 60〜70%程度(損失大) | 90%前後(高効率) |
| 主な用途 | 小規模システム、コスト重視 | 中〜大規模システム、高効率重視 |

図5.1. PWM方式とMPPT方式のIV曲線上の動作点(概念図)
5.1. PWM方式:メカニズムと限界
PWM方式は、スイッチング素子を用いて太陽光パネルと蓄電池を高速でON/OFF接続し、ON時間の割合(デューティ比)を調整することで、蓄電池への平均充電電流を制御する。
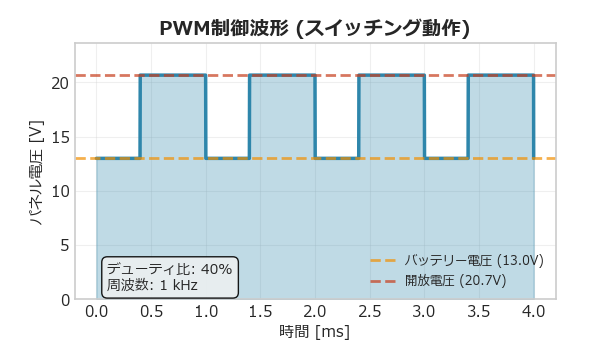
図5.2. PWM方式の動作シーケンスと電圧挙動(概念図)
図5.2に示すように、PWM方式ではON期間中、太陽光パネルの電圧が蓄電池の端子電圧に強制的に引き下げられる。この動作点は、パネルのIV特性曲線上ではMPPよりも低い電圧側に位置する。結果として、パネルが本来持ちうる最大電力を取り出すことができず、大きな発電損失が発生する。OFF期間でパネル電圧が回復するが、その間は電流が流れないため、平均的な電力としては低く抑えられてしまう。PWM方式の「OFF」は、平均充電電流の制御と過充電防止が主目的であり、パネルの最大電力点追従は行わない。
5.2. MPPT方式:高効率充電の実現
MPPT方式の最大の特徴は、DC-DCコンバータとMPPTアルゴリズムが連携し、太陽光パネルを常に最大電力点(MPP)付近で動作させることである。その本質は、出力側(蓄電池)に供給する電力を調整することで、入力側(太陽光パネル)に見える負荷(等価負荷)を自在に制御する点にある。
太陽光パネルは負荷の状態に応じて電圧・電流が変動するため、MPPにおける動作点を維持するには、適切な負荷を常時提示し続けなければならない。MPPTシステムでは、この「負荷」の役割をDC-DCコンバータが担っている。
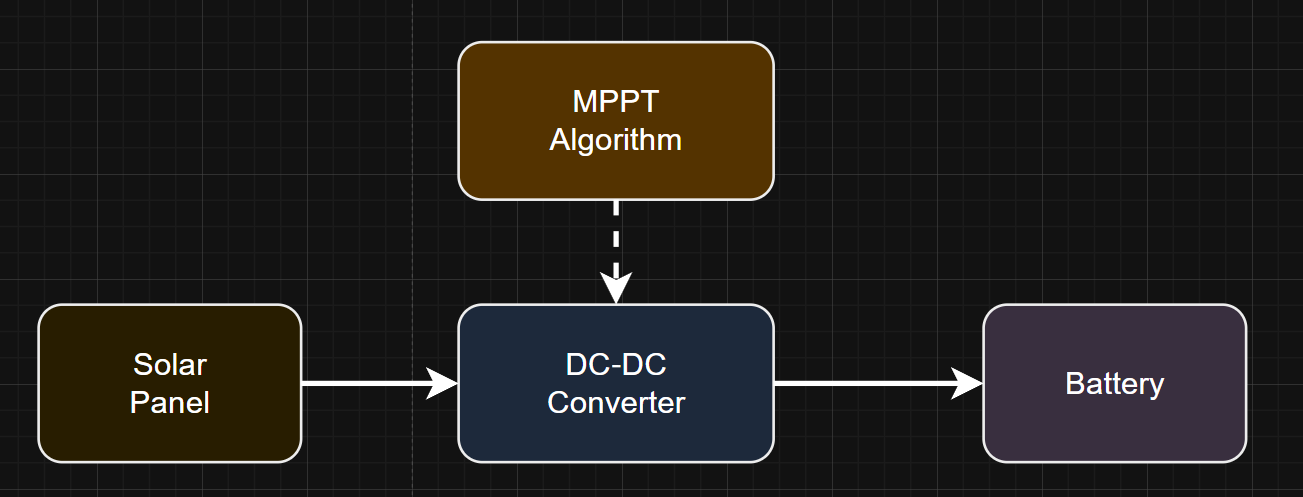
図5.3. MPPTシステムにおけるDC-DCコンバータの役割(ブロック図)
5.2.1 DC-DCコンバータによる負荷の提示メカニズム
DC-DCコンバータは本来、入力電圧を変換して安定した出力電圧を供給する装置である。しかし入出力間の電力保存則により、蓄電池側での電力要求が変化すると、それに応じて太陽光パネル側の電流も比例して変化する。この仕組みによって、パネルから見える負荷が変化する。
具体的には、以下の電力関係が成り立つ。
蓄電池側への供給電圧(
5.2.2 過負荷時の挙動とDC-DCコンバータの限界
ただし、DC-DCコンバータがあるからといって、太陽光パネルが無限の電流を供給できるわけではない。過大な負荷が接続されると、パネルは電流を増やそうとして電圧がMPPから外れてしまう。
実際のMPPTシステムは、「入力側(パネル)をMPPに維持する制御」と「出力側(蓄電池)への充電電力制御」という二つの制御ループを持っており、入力側のループを最優先する仕組みをとる。
- 負荷(蓄電池側)がパネルの供給可能な最大電力を超えると、入力ループの電圧を維持しようとする制御が働くため、結果的に出力側の電圧または電流を下げて電力バランスを保つ(フォールドバック動作)。
- これにより、過大な負荷が接続された場合でも、パネルがMPPから逸脱して発電効率が大きく落ちることを防ぐ。
6. MPPTアルゴリズムの主要手法
MPPTアルゴリズムには複数の手法が存在するが、ここでは最も一般的な2つを紹介する。これらのアルゴリズムは、DC-DCコンバータの制御入力を調整することで、パネルの動作点をMPPへ誘導する。
表6.1. 主要なMPPTアルゴリズムの比較
| アルゴリズム名 | 原理の概要 | 長所 | 短所 |
|---|---|---|---|
|
P&O法 (摂動・観測法 Perturb and Observe) |
パネルの動作電圧を微小に変化させ(摂動)、出力電力の変化を観測する。電力が増加すれば同じ方向に摂動を継続し、減少すれば方向を反転させる。 | 実装が比較的容易で、高い普及率を持つ。 | MPP周辺で動作点がわずかに振動するため、厳密なMPP動作ではない。太陽光強度が急変すると、誤追従する可能性がある。 |
|
IC法 (増分伝導度法 Incremental Conductance) |
パネルの微分電力 (dP/dV) がゼロとなる点がMPPであるという条件(dI/dV = -I/V)を利用する。電圧・電流の微小変化からこの関係を評価し、MPPを特定する。 | P&O法よりも高速かつ正確にMPPを追従できる。太陽光強度の急変にも比較的強い。 | P&O法よりも演算が複雑で、センシング精度がより求められる。 |
6.1 P&O法の動作
MPPTアルゴリズムは以下の手順で動作する。
-
パネル側の電圧・電流を測定する
- 電圧
V_{pv} I_{pv} P_{pv}=V_{pv} \times I_{pv}
- 電圧
-
微小な摂動を与える
- DC-DCコンバータのスイッチング比を微調整し、蓄電池に供給する電圧や電流をわずかに変動させる。これにより出力電力
P_{out}
- DC-DCコンバータのスイッチング比を微調整し、蓄電池に供給する電圧や電流をわずかに変動させる。これにより出力電力
-
入力側の応答(負荷の変化)を評価する
- 摂動による入力側の電流変化を測定し、結果として入力電力が増加したか減少したかを確認する。入力電力が増えた方向に摂動を継続し、減少すれば逆方向に修正する。
-
最大電力点(MPP)の追従
- 上記を繰り返し、最終的に電力の変化がゼロ(
\frac{dP}{dV} \approx 0
- 上記を繰り返し、最終的に電力の変化がゼロ(
このように、MPPTアルゴリズムが制御するのは、直接的には出力側の電力条件であり、間接的に入力側の負荷インピーダンスを動かしている点が特徴である。

図6.1. P&O法によるMPP追従の概念(IV曲線上の動き)
7. システム最適化とDC-DCコンバータの効率
実用的な太陽光発電システムにおける電力変換効率は、DC-DCコンバータ自体の変換効率によっても大きく左右される。DC-DCコンバータは、その動作点(入力電圧、出力電圧、負荷電流)によって変換効率が変動する。通常、80%〜95%程度の変換効率を有するが、この損失はシステム全体の発電量に直接影響を与える。
したがって、MPPTアルゴリズムは、単に太陽光パネルから最大電力を引き出すだけでなく、DC-DCコンバータが最大の変換効率を発揮できるような動作点も同時に考慮して制御されるべきである。これは、パネルの最大電力点とDC-DCコンバータの最高効率点が必ずしも一致しない場合があるため、システム全体の総合効率を最大化するための重要な設計要素となる。
8. まとめ
太陽光発電システムにおける効率的な電力利用のために不可欠なMPPT制御の原理と、DC-DCコンバータの役割、そして蓄電池の充電特性について考察した。
- 太陽光パネルは負荷に応じて出力特性が変化し、固有の**最大電力点(MPP)**が存在する。このMPPを常に追従することが高効率発電の鍵となる。
- 鉛蓄電池の充電には、Cレート制限と複数の充電段階(バルク、吸収、フロート)が存在し、これらを適切に管理することが蓄電池の寿命と安全性を確保するために重要である。特に、DC-DCコンバータの出力電圧調整が、蓄電池への充電電流を決定する主要因となる。
- 太陽光パネルと蓄電池の直接接続は、効率低下と蓄電池損傷のリスクを伴うため、充電コントローラが必須である。
- MPPT方式は、DC-DCコンバータとMPPTアルゴリズムの連携により、太陽光パネルの最大電力点から常に効率良く電力を取り出すことを可能にする。DC-DCコンバータはMPPTアルゴリズムの指令に基づき、パネルの等価負荷を調整する実行手段である。
- MPPTアルゴリズム(P&O法、IC法など)は、パネルの電圧・電流を測定し、その電力変化を監視しながら、DC-DCコンバータの動作点を調整する。
- システム全体の効率最適化には、DC-DCコンバータの変換効率も考慮に入れる必要がある。
これらの知見は、太陽電池と蓄電池を組み合わせたあらゆる電力供給システムの設計と運用において、その基礎となる重要な指針となる。
付録:MPPT制御の実装例・疑似コード
本節では、実際のMPPT制御を実装するためのハードウェア構成と、その制御アルゴリズムの疑似コード例を示す。これらのコードは概念的なものであり、実際の環境での動作保証や最適化は含まれていないことに留意されたい。
ハードウェア構成例:ESP32+INA226によるMPPT制御
- 太陽光パネル: 電力供給源。
- 精密電流・電圧センサー(例: INA226): ソーラーパネルの出力電圧および電流を高精度に測定(I2C通信)。
- DC-DCコンバータ(例: LM2596): ソーラーパネルの出力を蓄電池充電に適した電圧に変換。
- デジタルポテンショメータ(例: MCP41010): DC-DCコンバータの出力電圧をマイクロコントローラから電子的に可変させるための素子(SPI通信)。
- 鉛蓄電池: エネルギー貯蔵。
- ESP32マイコン: システム全体の制御を行うマイクロコントローラ。INA226からの測定値に基づきMPPTアルゴリズムを実行し、デジタルポテンショメータを介してDC-DCコンバータを制御する。
基本コード例(Arduino/C++風)
1. INA226センサーによる電圧・電流測定
#include <Wire.h> // I2C通信ライブラリ
#include <INA226.h> // INA226センサー用ライブラリ
INA226 ina226(0x40); // INA226のI2Cアドレスを指定
void setup() {
Wire.begin(); // I2C通信の開始
ina226.begin(); // INA226センサーの初期化
// 必要に応じてINA226の設定(シャント抵抗値、平均化回数など)を行う
}
float getPanelVoltage() {
return ina226.readBusVoltage(); // ソーラーパネルの電圧を読み取る
}
float getPanelCurrent() {
return ina226.readCurrent(); // ソーラーパネルの電流を読み取る
}
2. デジタルポテンショメータによるDC-DCコンバータの出力調整
#include <SPI.h> // SPI通信ライブラリ
#define CS_PIN 5 // チップセレクトピンの定義(例: ESP32のGPIO5)
void setPotValue(uint8_t value) { // デジタルポテンショメータの値を設定する関数
digitalWrite(CS_PIN, LOW); // チップセレクトをLOWにし、SPI通信を開始
SPI.transfer(0x11); // MCP41010のコマンドバイト(レジスタ書き込み)
SPI.transfer(value); // ポテンショメータの抵抗値(0〜255)を設定
digitalWrite(CS_PIN, HIGH); // チップセレクトをHIGHにし、SPI通信を終了
}
3. P&O法(摂動・観測法)の疑似コード例
float prevPower = 0; // 前回の電力
int direction = 1; // 調整方向 (1:増加, -1:減少)
uint8_t potValue = 128; // デジタルポテンショメータの初期値(中間)
void loop() {
float V = getPanelVoltage(); // 現在のパネル電圧を測定
float I = getPanelCurrent(); // 現在のパネル電流を測定
float power = V * I; // 現在のパネル電力を計算
// 電力変化を観測し、調整方向を決定
if (power > prevPower) { // 現在の電力が前回よりも増加した場合
potValue += direction; // 同じ方向にポテンショメータ値を調整
} else { // 電力が減少または変化がない場合
direction *= -1; // 調整方向を反転
potValue += direction; // 反対方向にポテンショメータ値を調整
}
// potValueが0〜255の範囲に収まるように制限
potValue = constrain(potValue, 0, 255);
setPotValue(potValue); // デジタルポテンショメータに新しい値を設定(DC-DCコンバータの出力調整)
prevPower = power; // 現在の電力を次回の「前回電力」として保存
delay(500); // 500ミリ秒の待機(調整間隔)
}
4. IC法(増分伝導度法)の疑似コード例
float V_prev = 0, I_prev = 0; // 前回の電圧と電流
uint8_t potValue = 128; // デジタルポテンショメータの初期値
void loop() {
float V_now = getPanelVoltage(); // 現在のパネル電圧を測定
float I_now = getPanelCurrent(); // 現在のパネル電流を測定
float deltaV = V_now - V_prev; // 電圧の変化量
float deltaI = I_now - I_prev; // 電流の変化量
// IC法の条件に基づいて調整方向を決定
if (deltaV == 0) { // 電圧変化がない場合
if (deltaI > 0) potValue--; // 電流増加ならMPPより左(低電圧)にいるので電圧を上げる方向(potValue減)
else if (deltaI < 0) potValue++; // 電流減少ならMPPより右(高電圧)にいるので電圧を下げる方向(potValue増)
} else { // 電圧変化がある場合
float dIdV = deltaI / deltaV; // dI/dV (瞬時コンダクタンスの増分)
float minusIV = -I_now / V_now; // -I/V (瞬時コンダクタンス)
if (dIdV > minusIV) potValue++; // dI/dV > -I/V ならば、MPPより低い電圧側なので電圧を上げる方向
else if (dIdV < minusIV) potValue--; // dI/dV < -I/V ならば、MPPより高い電圧側なので電圧を下げる方向
// else (dIdV == minusIV) の場合はMPPに到達していると判断
}
potValue = constrain(potValue, 0, 255); // potValueの範囲を制限
setPotValue(potValue); // デジタルポテンショメータに新しい値を設定
V_prev = V_now; // 現在の値を次回の「前回値」として保存
I_prev = I_now;
delay(500); // 500ミリ秒の待機
}
実装上の留意点
-
制御値の範囲制限: デジタルポテンショメータの制御値(
potValue)は、その物理的な範囲(通常0〜255)を超過しないよう、constrain()関数などを用いて適切に制限する必要がある。 - 測定値の安定化: 電圧・電流の測定値は、外部ノイズやセンサーの特性により変動しやすい。精度の高いMPPT制御を実現するためには、複数回の測定値の平均化や、移動平均フィルタなどのデジタルフィルタリング処理を適用することが推奨される。
- 蓄電池保護機能: 蓄電池への充電電流がCレート制限を超過しないよう、プログラム中で充電電流を監視し、必要に応じてMPPTによる最大電力点追従を一時的に中断し、充電電流を制限する機能(定電圧定電流充電)を実装する必要がある。
- 開発の段階的アプローチ: 開発初期段階では、デジタルポテンショメータの代わりに手動で可変抵抗器を用いるなど、DC-DCコンバータの出力調整メカニズムとパネルの反応を段階的に確認することが、効率的な開発に繋がる。
Discussion