👌
[ROS 2 Humble] YDLIDAR T-mini Plusを使う (備忘録)
概要
YDLIDAR T-mini PlusをROS 2 Humble環境で使用する方法を説明します。 以前は下記の記事を参考にしていましたが、T-mini Plus用にlaunchファイルやyamlファイルを都度書き換える必要があり、手間がかかっていました。そこで、GitHubのリポジトリをフォークし、より使いやすく整備しました。 作成したリポジトリはこちらです:
1. YDLidar-SDKをインストール
まず、YDLidar-SDKのビルドとインストールを行います。
sudo apt install cmake pkg-config
sudo apt-get install python3 swig
sudo apt-get install python3-pip
git clone https://github.com/YDLIDAR/YDLidar-SDK.git
mkdir YDLidar-SDK/build
cd YDLidar-SDK/build
cmake ..
make
sudo make install
cd ~/YDLidar-SDK/
pip3 install .
次に、実行権限を追加します。
sudo gpasswd --add $USER dialout
sudo reboot
2. YDLidarのROS2パッケージをインストール
本記事では、私がフォークして作成したydlidar_ros2_driverを使用します。
YDLIDAR公式ドライバのデフォルトブランチ(master)では、クローンしてビルドを行うと多数のエラーが発生します。そこで、デフォルトブランチをhumbleに変更し、T-mini Plus用のlaunchファイルも追加しました。これにより、購入後すぐに動作確認ができます。
mkdir -p ydlidar_ros2_ws/src
cd ydlidar_ros2_ws/src/
git clone git@github.com:robohase/ydlidar_ros2_driver.git
cd ..
colcon build --symlink-install
chmod 0777 src/ydlidar_ros2_driver/startup/*
sudo sh src/ydlidar_ros2_driver/startup/initenv.sh
3. 実行
LiDARノードのみを起動する場合:
ros2 launch ydlidar_ros2_driver tmini.launch.py

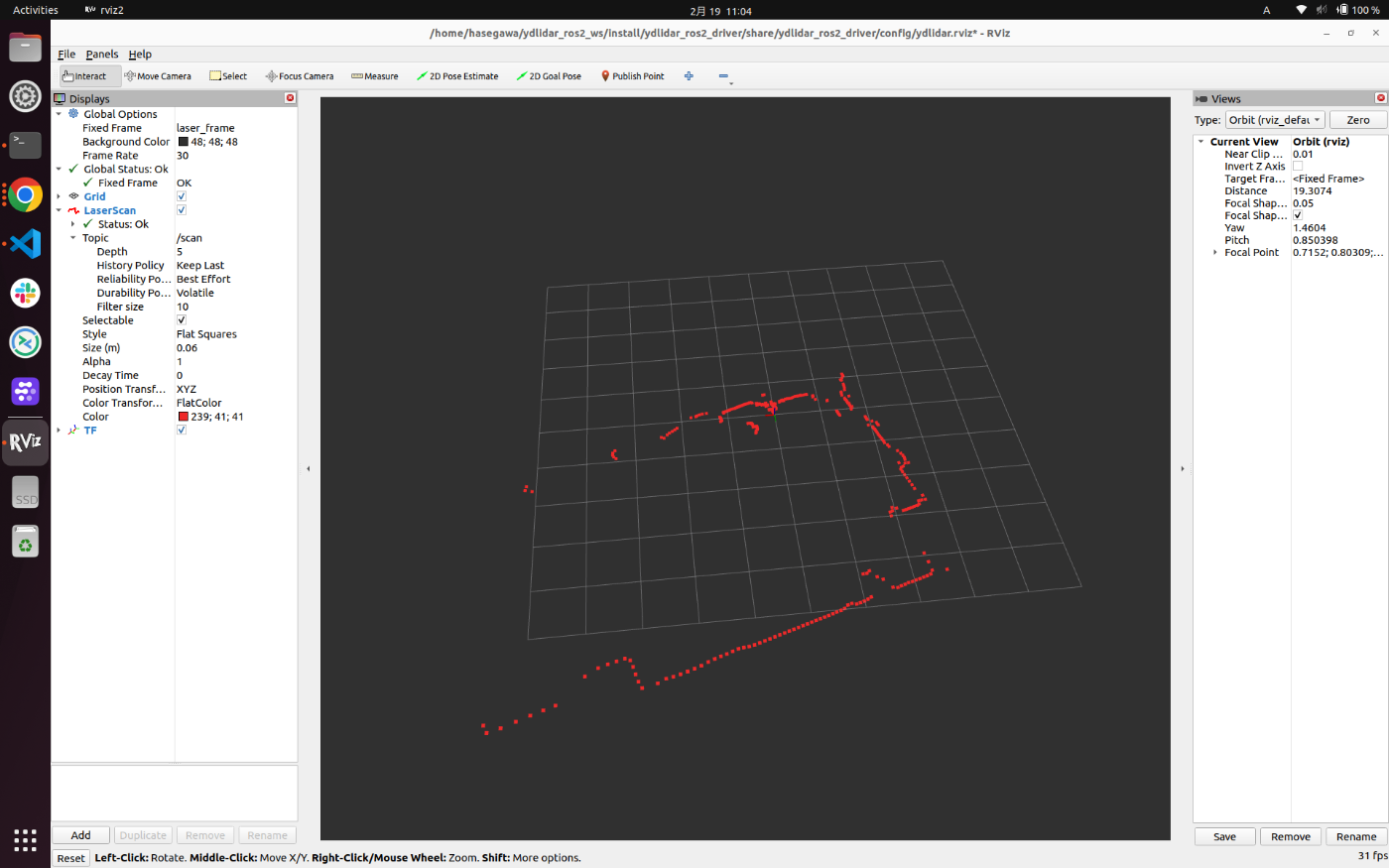
LiDARノードを起動し、rviz2でLaserScanを確認する場合:
ros2 launch ydlidar_ros2_driver tmini_view.launch.py
ROS2の知識がある方や設定に時間をかけられる方であれば、すぐに動作させることができますが、T-mini Plusを久しぶりに使用する際に毎回手間がかかっていた為、この記事とリポジトリの作成を行いました。
どなたかのお役に立てれば幸いです。
Discussion