Open5
cv2.getAffineTransform の Numpy 置き換え検討
GPT4先生の回答
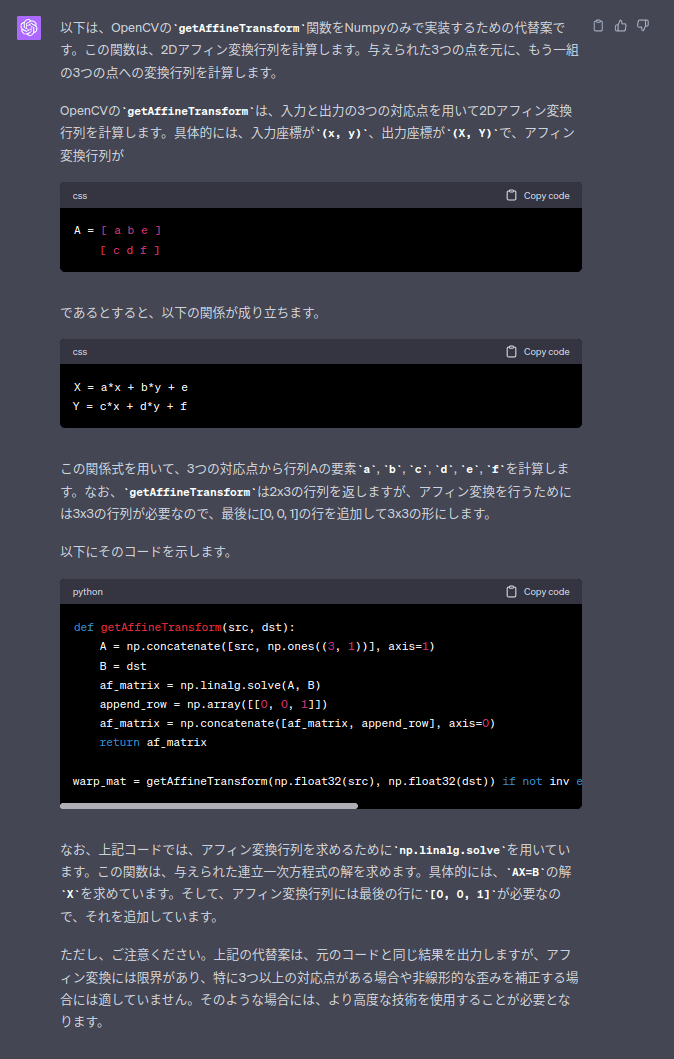
OpenCVのgetAffineTransformは、入力と出力の3つの対応点を用いて2Dアフィン変換行列を計算します。具体的には、入力座標が(x, y)、出力座標が(X, Y)で、アフィン変換行列が
A = [ a b e ]
[ c d f ]
であるとすると、以下の関係が成り立ちます。
X = a*x + b*y + e
Y = c*x + d*y + f
この関係式を用いて、3つの対応点から行列Aの要素a, b, c, d, e, fを計算します。なお、getAffineTransformは2x3の行列を返しますが、アフィン変換を行うためには3x3の行列が必要なので、最後に[0, 0, 1]の行を追加して3x3の形にします。
以下にそのコードを示します。
def getAffineTransform(src, dst):
A = np.concatenate([src, np.ones((3, 1))], axis=1)
B = dst
af_matrix = np.linalg.solve(A, B)
append_row = np.array([[0, 0, 1]])
af_matrix = np.concatenate([af_matrix, append_row], axis=0)
return af_matrix
warp_mat = getAffineTransform(np.float32(src), np.float32(dst)) \
if not inv else getAffineTransform(np.float32(dst), np.float32(src))
なお、上記コードでは、アフィン変換行列を求めるためにnp.linalg.solveを用いています。この関数は、与えられた連立一次方程式の解を求めます。具体的には、AX=Bの解Xを求めています。そして、アフィン変換行列には最後の行に[0, 0, 1]が必要なので、それを追加しています。
ただし、ご注意ください。上記の代替案は、元のコードと同じ結果を出力しますが、アフィン変換には限界があり、特に3つ以上の対応点がある場合や非線形的な歪みを補正する場合には適していません。そのような場合には、より高度な技術を使用することが必要となります。