📷
画像処理100本ノックに挑戦|微分フィルタ(014/100)
これはなに?
画像処理100本ノックを、TypeScriptとlibvipsで挑戦してみる記事の14本目です。
前回
実装
お題
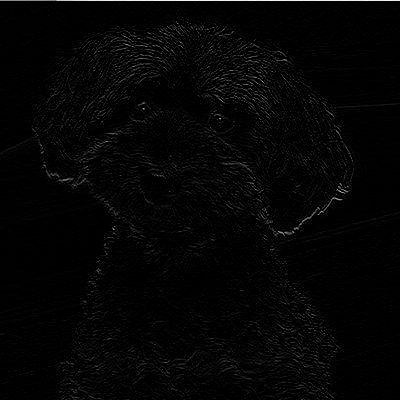
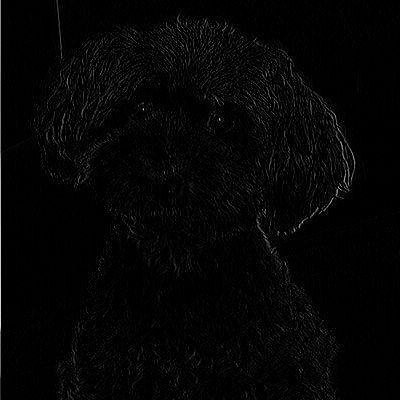
微分フィルタ(3x3)を実装せよ。
微分フィルタは輝度の急激な変化が起こっている部分のエッジを取り出すフィルタであり、隣り合う画素同士の差を取る。
(a)縦方向 (b)横方向
0 -1 0 0 0 0
K = [ 0 1 0 ] K = [ -1 1 0 ]
0 0 0 0 0 0
Coding
import sharp from 'sharp';
export async function differentialFilter(
inputPath: string,
outputVerticalPath: string,
outputHorizontalPath: string,
kernelSize: number = 3
): Promise<void> {
try {
// まずグレースケールに変換
const image = await sharp(inputPath)
.raw()
.toBuffer({ resolveWithObject: true });
const { data, info } = image;
const { width, height, channels } = info;
// グレースケール変換
const grayData = Buffer.alloc(width * height);
for (let i = 0; i < data.length; i += channels) {
const b = data[i];
const g = data[i + 1];
const r = data[i + 2];
const gray = Math.round(0.2126 * r + 0.7152 * g + 0.0722 * b);
grayData[i / channels] = gray;
}
// パディングサイズを計算
const pad = Math.floor(kernelSize / 2);
// パディング付きの配列を作成
const paddedHeight = height + 2 * pad;
const paddedWidth = width + 2 * pad;
const paddedData = new Float32Array(paddedHeight * paddedWidth);
const tempData = new Float32Array(paddedHeight * paddedWidth);
// ゼロパディング
for (let y = 0; y < paddedHeight; y++) {
for (let x = 0; x < paddedWidth; x++) {
const destPos = y * paddedWidth + x;
if (y >= pad && y < paddedHeight - pad &&
x >= pad && x < paddedWidth - pad) {
const srcY = y - pad;
const srcX = x - pad;
const srcPos = srcY * width + srcX;
paddedData[destPos] = grayData[srcPos];
tempData[destPos] = grayData[srcPos];
}
}
}
// カーネルの定義
const verticalKernel = [
[0, -1, 0],
[0, 1, 0],
[0, 0, 0]
];
const horizontalKernel = [
[0, 0, 0],
[-1, 1, 0],
[0, 0, 0]
];
// 結果用の配列を作成
const verticalResult = Buffer.alloc(width * height);
const horizontalResult = Buffer.alloc(width * height);
// フィルタリング
for (let y = 0; y < height; y++) {
for (let x = 0; x < width; x++) {
let sumVertical = 0;
let sumHorizontal = 0;
// カーネル領域の処理
for (let ky = 0; ky < kernelSize; ky++) {
for (let kx = 0; kx < kernelSize; kx++) {
const py = y + ky;
const px = x + kx;
const pixel = tempData[py * paddedWidth + px];
// 縦方向と横方向の畳み込み
sumVertical += pixel * verticalKernel[ky][kx];
sumHorizontal += pixel * horizontalKernel[ky][kx];
}
}
// 結果を保存(0-255の範囲にクリップ)
const pos = y * width + x;
verticalResult[pos] = Math.min(255, Math.max(0, sumVertical));
horizontalResult[pos] = Math.min(255, Math.max(0, sumHorizontal));
}
}
// 結果を保存(縦方向)
await sharp(verticalResult, {
raw: {
width,
height,
channels: 1
}
})
.toFile(outputVerticalPath);
// 結果を保存(横方向)
await sharp(horizontalResult, {
raw: {
width,
height,
channels: 1
}
})
.toFile(outputHorizontalPath);
console.log('微分フィルタ処理が完了しました');
} catch (error) {
console.error('画像処理中にエラーが発生しました:', error);
throw error;
}
}
Test
import { existsSync, unlinkSync } from 'fs';
import { join } from 'path';
import sharp from 'sharp';
import { differentialFilter } from './imageProcessor';
describe('Differential Filter Tests', () => {
const testInputPath = join(__dirname, '../test-images/test.jpeg');
const testOutputVerticalPath = join(__dirname, '../test-images/test-diff-v.jpg');
const testOutputHorizontalPath = join(__dirname, '../test-images/test-diff-h.jpg');
afterEach(() => {
[testOutputVerticalPath, testOutputHorizontalPath].forEach(path => {
if (existsSync(path)) {
unlinkSync(path);
}
});
});
test('should successfully apply differential filter', async () => {
await expect(differentialFilter(
testInputPath,
testOutputVerticalPath,
testOutputHorizontalPath
)).resolves.not.toThrow();
expect(existsSync(testOutputVerticalPath)).toBe(true);
expect(existsSync(testOutputHorizontalPath)).toBe(true);
});
test('should maintain image dimensions', async () => {
await differentialFilter(
testInputPath,
testOutputVerticalPath,
testOutputHorizontalPath
);
const inputMetadata = await sharp(testInputPath).metadata();
const verticalMetadata = await sharp(testOutputVerticalPath).metadata();
const horizontalMetadata = await sharp(testOutputHorizontalPath).metadata();
expect(verticalMetadata.width).toBe(inputMetadata.width);
expect(verticalMetadata.height).toBe(inputMetadata.height);
expect(horizontalMetadata.width).toBe(inputMetadata.width);
expect(horizontalMetadata.height).toBe(inputMetadata.height);
});
test('should detect edges in both directions', async () => {
await differentialFilter(
testInputPath,
testOutputVerticalPath,
testOutputHorizontalPath
);
const verticalImage = await sharp(testOutputVerticalPath)
.raw()
.toBuffer({ resolveWithObject: true });
const horizontalImage = await sharp(testOutputHorizontalPath)
.raw()
.toBuffer({ resolveWithObject: true });
// エッジの存在を確認
let hasVerticalEdges = false;
let hasHorizontalEdges = false;
for (let i = 0; i < verticalImage.data.length; i++) {
if (verticalImage.data[i] > 30) hasVerticalEdges = true;
if (horizontalImage.data[i] > 30) hasHorizontalEdges = true;
if (hasVerticalEdges && hasHorizontalEdges) break;
}
expect(hasVerticalEdges).toBe(true);
expect(hasHorizontalEdges).toBe(true);
});
});
結果
| 入力 | 出力・縦方向 | 出力・横方向 |
|---|---|---|
 |
 |
 |
Discussion