概要
NuTech-Rというチームでロボカップレスキュー実機リーグに参加している者です。
チームでは、Maxon Motor社製のモータを使ってロボット開発しています。
この記事では、後輩たちがスムーズにMaxon Motorの制御を習得できるようにモータ制御方法について解説します。今回はモータ制御の前提となるEPOS Studioの設定方法とモータパラメータの設定手順について詳しく説明していきます。
0. 動作環境と用意したもの

- Windows11
- USB Micro B ケーブル
- 電源装置
- EPOS4 Compact 50/8 CAN
- Maxon組み合わせギアヘッドモータ(製造番号:488042)
- EC-max 30 Ø30 mm, ブラシレス, 60 Watt, ホールセンサ内蔵(製造番号:272763)
- プラネタリギアヘッド GP 32 C Ø32 mm, 1.0 - 6.0 Nm, セラミック・バージョン(製造番号:166936)
- エンコーダ HEDL 5540, 500 カウント/回転, 3 チャンネル, ラインドライバ RS 422(製造番号:110514)
↓ モータの購入先リンク
1. EposStudioのインストール
下記の公式サイトからEPOS Studioソフトウェアをインストールする。「ダウンロードへ」のボタンをクリックするとダウンロードが始まる。
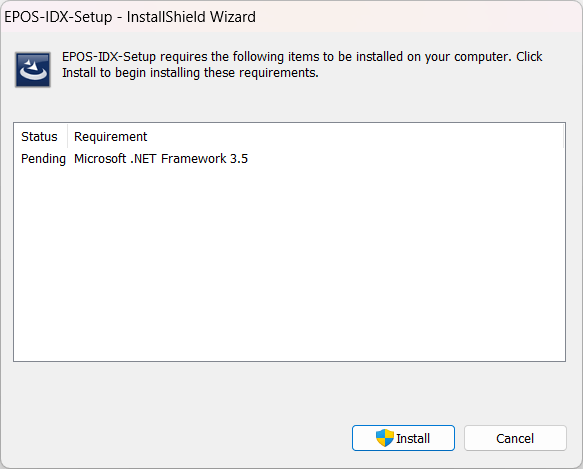
2. InstallShield Wizardでセットアップする
ダウンロードしたzipファイルを解凍して、セットアップを進める。
基本的にオプションの設定はせずにそのままNextを押して進んでいく。
3. Epos Studioを開く
Windowsの検索機能でEpos Studioを入力して開く。

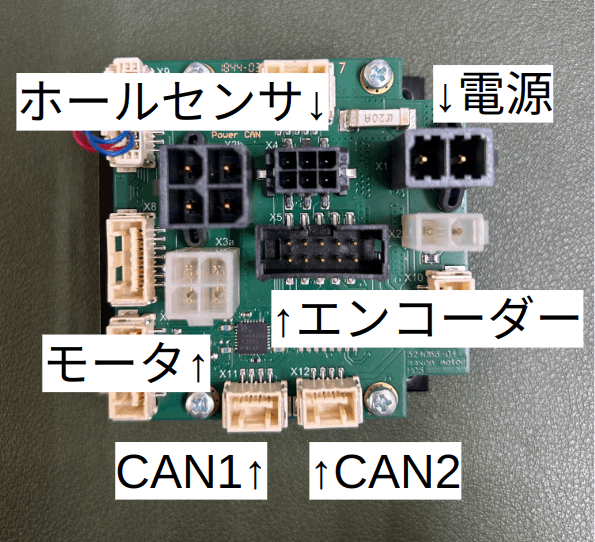
4. 配線をする
下記のようにして、配線されたモータをEPOS4に接続する。
EPOS4とパソコンはUSB Micor Bケーブルで繋いでおく。
また電源装置から24VをEPOS4に印加する。

また配線の例は下記に記載する。
EPOSの細かい設定等は参考資料のEPOS4 Compact 50/8 CAN データシートをよく読む。
CANのID変更に関しては3-44ページにわかりやすく記載されているので参考にする。
5. プロジェクトの作成
新規プロジェクトを作成する。今回使用するドライバがEPOS4なので「EPOS4 Project」を選択して次に進む

6. EPOS4とソフトウェアを接続する
左上にあるConnect ALLというボタンを押して、ソフトウェアとEPOS4を接続する。

左側のNavigationタブからCommunicationを選択して、EPOS4 CAN [NodeN]に繋がっているUSB0を右クリックしてScanning Devicesをする。

Start Scanningを押すと検索が始まり、繋がっているEPOSに接続される。

6. モータのパラメータを設定する
左側のNavigationタブからWizardsを選択して、Startupを選択する。データシートを参考にしながらパラメータを設定していく。今回使用したモータのデータシートは参考資料にリンクを貼ったので適宜確認しながら設定を行う。
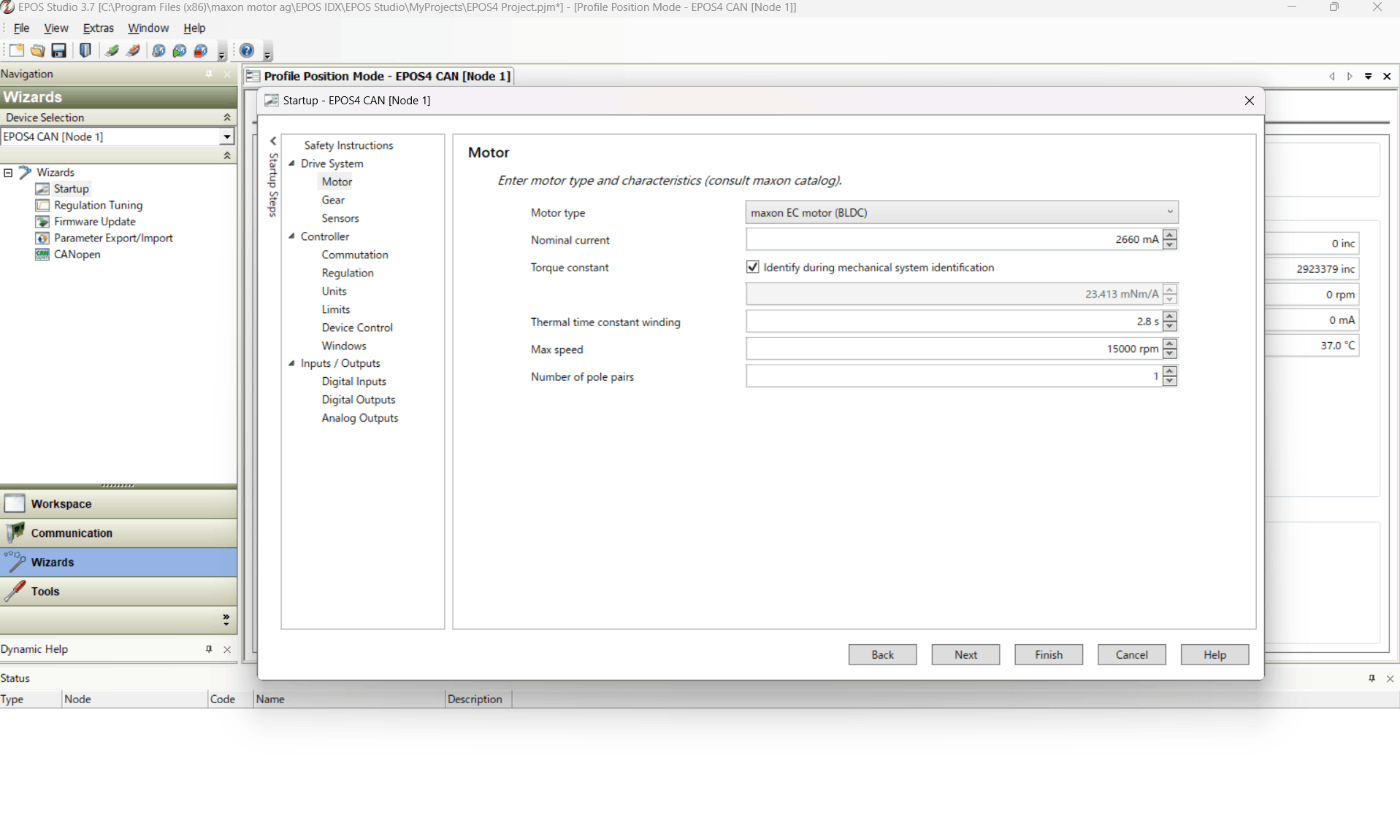
Motor

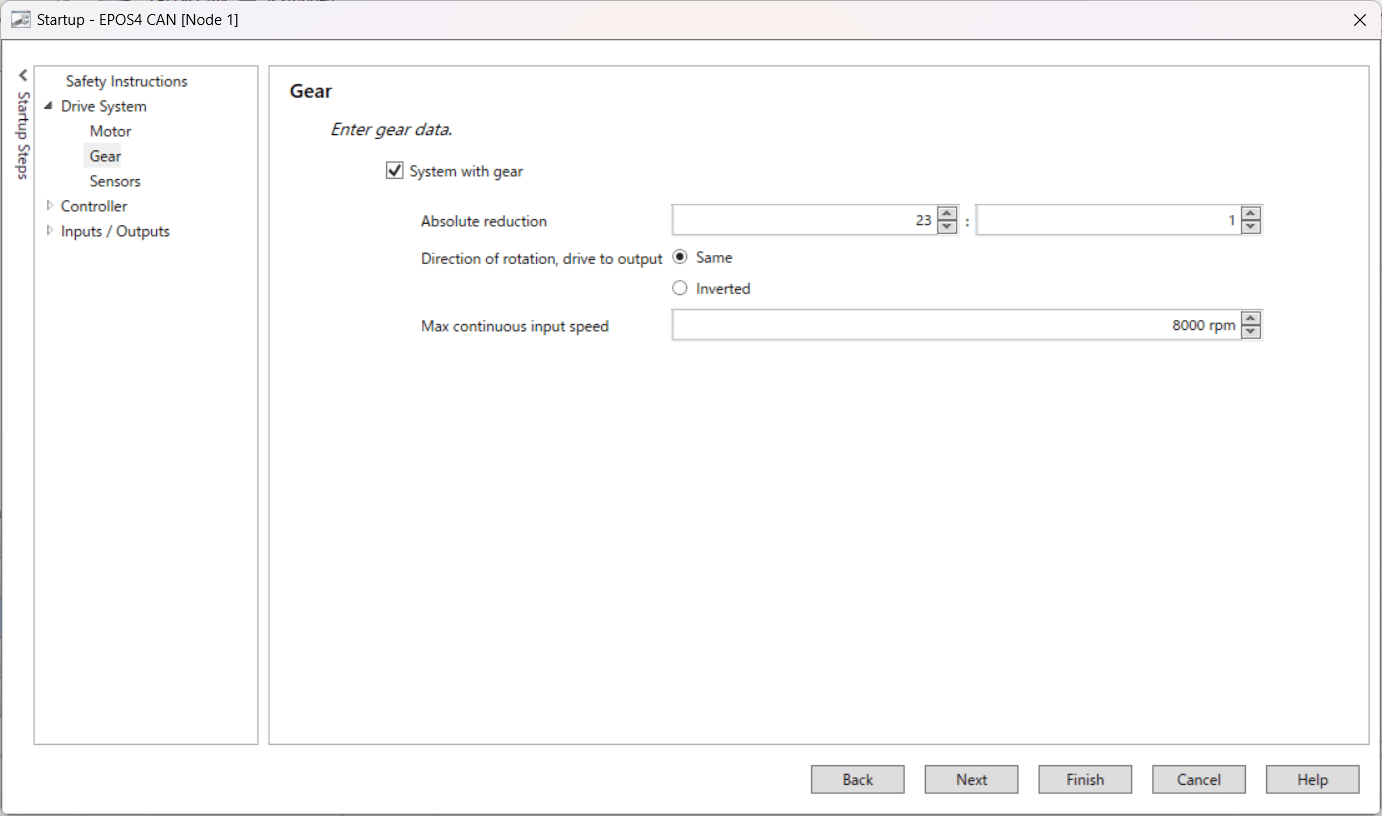
Gear
Sensors

Commutation

Regulation

Units

Limits

Device Control

windows

Digital Inputs

Digital Outputs

Analog Outputs

また上記の設定に手間がかかる場合は下記のリンクから設定済みファイルをダウンロードして、Parameter Importすることもできる。左側のNavigationタブからWizardsを選択して、Parameter Importを選択する。ダウンロードしたファイルを選択して、Import Parameters from Fileを押すとインポートすることができる。

今回設定してExportしたデータは下記のGoogleDriveのリンクからダウンロードできる。必要であればダウンロードしてImportしてください。
7. 動作確認
設定完了後Profile Velocity Modeを使ってモータを回して動作確認を行う。
左側のNavigationタブからToolsを選択して、Profile Velocity Modeを選択する。
Enableボタンを押した後にInputs->Target Velocityの中のrpmを入力する。
その後Set velocityを押すとモータが回り始める。この時に高いrpmで回すとエラーが出るので、少しづつ回転数を上げながら動作テストを行う。終わったらDisableを押すと止まる。

参考資料
EC-max 30 データシート
プラネタリギアヘッド GP 32 C データシート
エンコーダ HEDL 5540 データシート
EPOS4 Compact 50/8 CAN データシート
日記;回すだけ③EPOS studioでモータをチューンする

NuTech-Rは長岡技術科学大学のレスキューロボット開発チームです。レスキューロボットの競技会を通じてロボットの社会実装を目指して活動しています。sites.google.com/view/nutechr/home
Discussion