[Houdini]Fullbody IKメモ

HoudiniのFullbodyIKはなかなか良いです。
設定や操作にはコツがいるが、たったこれだけのノードでも十分リグとして機能する。
肘や膝の回転用のコントローラも必要なく、手足もピタっと固定できる。
実用にはまだまだな部分もありますが可能性を感じます。
今後の進化に期待したい。
いろいろチュートリアル動画を見て参考にしましたが、ポイントなどをまとめておきます。
コントローラにするポイントを作る
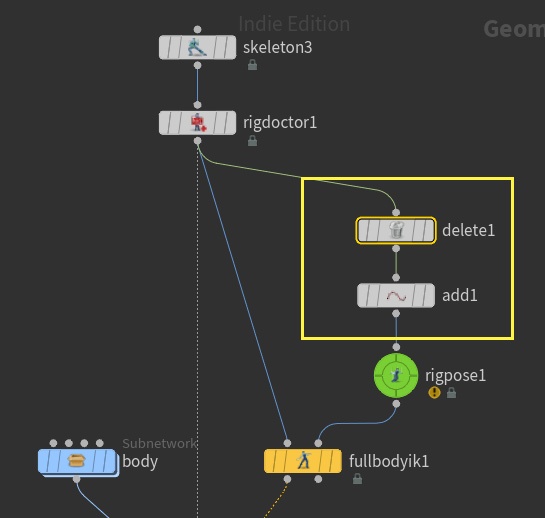
やり方はいろいろあるのだけど、チュートリアル動画見るとこのやり方ですね。
deleteやblastでコントローラにするポイントを抜き出し、addでポイントを作る。
他にはdeletejoint→parentjointsという手もあって、私はこっちの方が良いような気がします。

だいたいこのあたりのポイントを指定すればOK。
FullbodyIK SOP

第1インプットに変形前スケルトン、第2インプットに変形後スケルトンを入力します。

Map Usingを「Match By Attribute」に。
パラメータは正確にはよくわからないので、印象ですが
Iterationsは数値を上げると関節が曲がりやすくなります。
Dampingも数値を下げれば似たような効果があります。

設定の一番下にあるConfigureをクリックするとコントローラを個別に指定して設定することができます。「+」を押すとリストが表示されるのでGroupでポイントを指定。
weightで影響力を調整。
Priorityを1以上にすることでポイントを固定。
Depthはチェックを入れると使えるようになります。 コントロールポイントからIKの及ぶ範囲を指定できる。例えば「2」に設定すればポイントから2つ先のボーンで影響が止まるので通常の2ボーンIKと同じように動かせる。
参考にした動画
Houdini KineFX 101: Tutorial Four - Full Body IK Setup
Houdini KineFX 101: Rigging From Scratch, Binding Skin to bones, Simple Constraints
動画の最後の方にFullbodyIKの説明あり。
11分くらいから説明あり。
Discussion