ROS2 Humble Navigation2 upgrade reminder
0.Introduction
Using Navigation2Isaac SIM 2022.2.0
- Its original Japanese document is released in Qiita
- My published document copy to Zenn
- Hope your help to migrate Ubuntu 22.04 / Isaac SIM 2022.2.0
- Anaconda environment
Isaac SIM sample list
| 項目 | 2022.1.x | 2022.2.0 |
|---|---|---|
| Ubuntu version | 20.04 | 22.04 |
| Carter | V1 | smiliar with V1 |
| Moveit2 | Foxy | Humble |
| ROS2 | Foxy | Humble(recommended) |
Added humble install shell (19 Feb 2024)
1.Humble setup(binary)
-
Set locale should be UTF-8. To avoid trouble.
- Fortunately, my locale is UTF-8. I don't need change locale.
-
More detail, please refer to ROS2 official. Because this article is for users who are availble to use foxy before.
command line list from official site
sudo apt install software-properties-common
sudo add-apt-repository universe
sudo apt update && sudo apt install curl
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
Binary install process
- desktop package is all in one.
sudo apt update
sudo apt upgrade -y
sudo apt install ros-humble-desktop
sudo apt install ros-dev-tools
echo "source /opt/ros/humble/setup.bash" >> .bashrc
confirmation
-
According to Talker-listener:IsaacSIM, it is acceptable but double check result just in case.
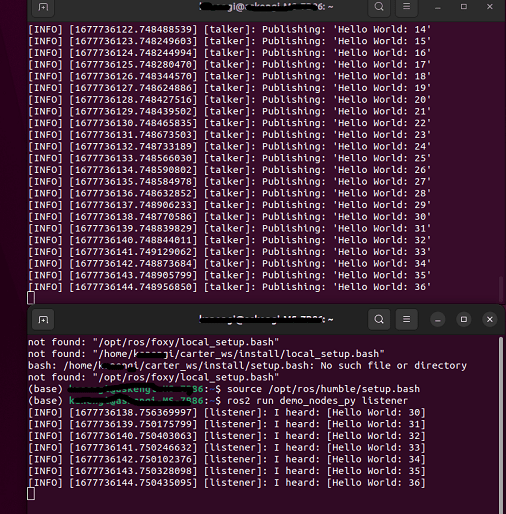
-
Implement colcon build to sample of 2022.2.0
-
For my checking is no difference from previous sample
-
If you find error message about Moveit, please install Moveit2. Before build sample
-
2.Navigation2additional components(optional)
- They may be intalled with Humble package.
sudo apt install ros-humble-navigation2 ros-humble-nav2-bringup '~ros-humble-turtlebot3-.*'
sudo apt install ros-humble-moveit
3.lauch Isaac SIM and check
- Since ver 2022.2x Menu list location is changed.
- Open Extension menu after disable ROS、enable ROS2 Humble.
Failure example ROS2 Humble invalid(only ROS2 selectable)
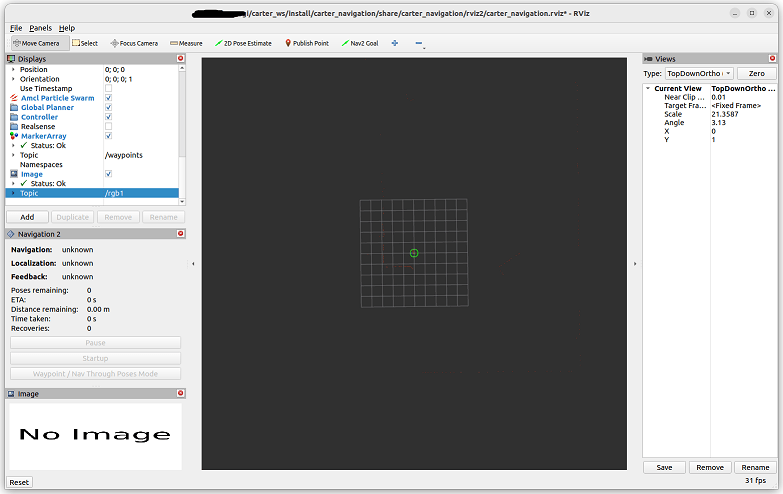
**all menu is unknown **
- When I met this issue, I didn't install Moveit. although execute colcon build.
- ROS2 was removed and re-install but I don't reuse work space which is build in ROS2 foxy.
- Btw 'ros2 topic echo /tf' response is normal
- OK, modify the yaml file in the Navigation param folder.
#robot_model_type: "Differential"
robot_model_type: "nav2_amcl::DifferentialMotionModel"Please modify yaml in the acml parameter.
- Navigation2 parameter is changed from Foxy sample.
2 - Under bt_navigator: (Added all the plugins that were missing)
bt_navigator: under -nav2 xxxをparameters need to replace as below link
Success sample
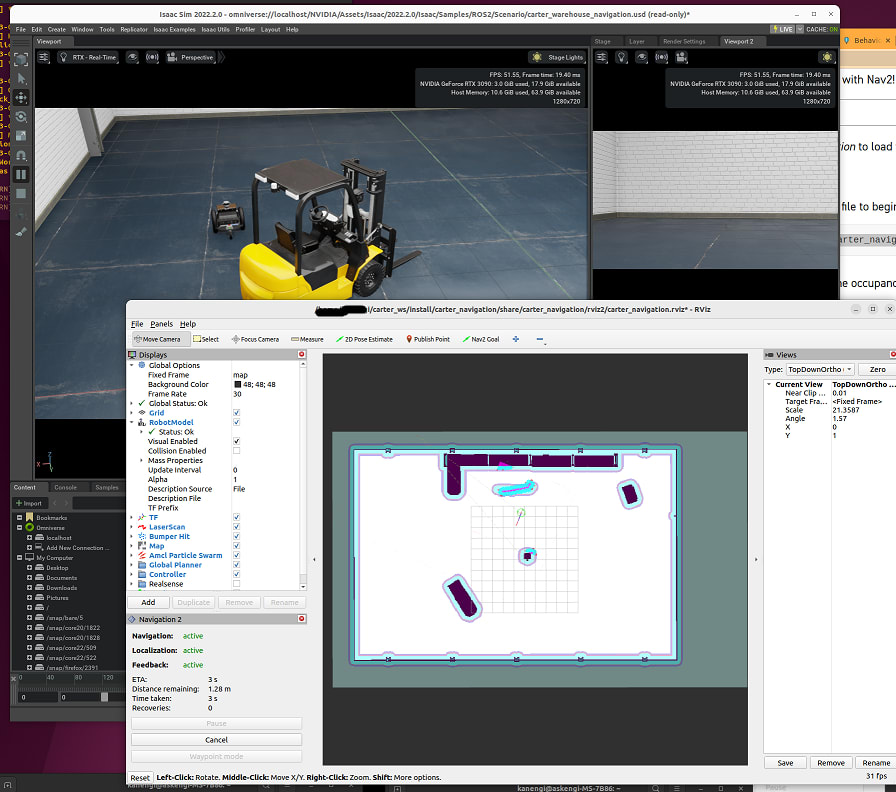
IssacSIM 2022.2.0 on the Foxy using sample
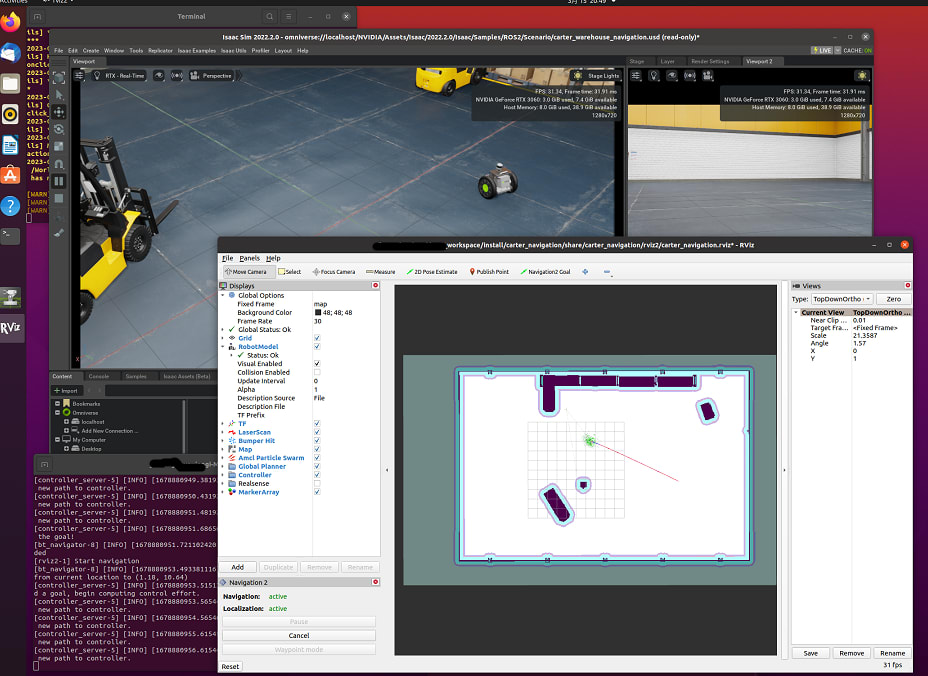
Navigation2 menu of Rviz2 is different from Humble, but you can set parameter -Window>Extension > ROS2 Humble chosose enable in the IssacSIM menu.
Discussion