宇宙からの地球観測第3章 地球を回る人工衛星の運動と座標系
宇宙からの地球観測 第3章の章末問題は一見して難しいだろうと想像つきます。問題文が短いからです。
問題3.1
式3.13 の第一式を導きなさい
\sin \delta = \sin I \sin \phi \sin(\alpha - \Omega) = \cot I \tan \delta \cos(\alpha - \Omega) = \cos \phi \sec \delta
基本用語の理解
式3.13 の意味がまったくわかりません。
色々検索してみると、どうやら球面三角法の背景知識が必要なようです。
球面上に2点A,Bがあるとき、この2点と球の中心を通る平面で切断したときの断面に現れる円が大円であり、このときの大円上の弧ABを球面多角形においては辺と呼ぶ。 通常、球の半径は1とするので、辺の長さはその辺を含む大円における中心角の弧度法表示と一致する。
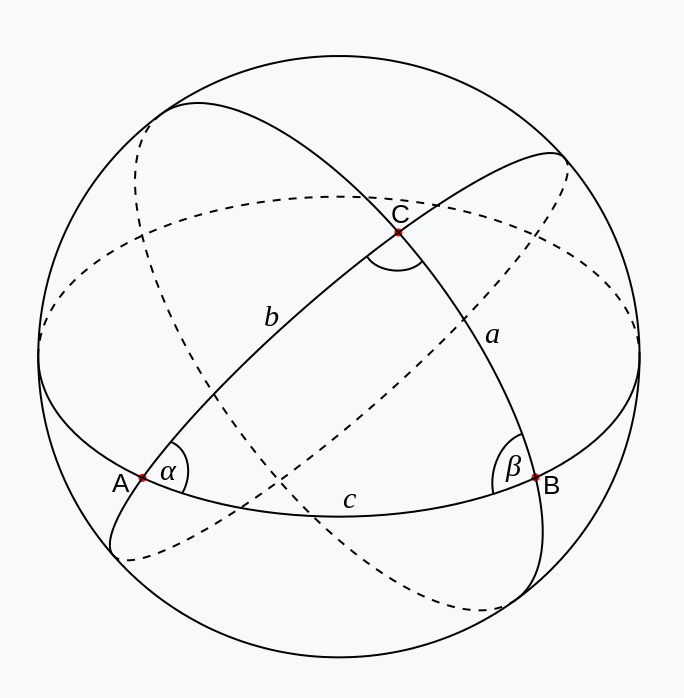
なるほど、角度と辺の長さが一致するというのがとても面白いですね。
直角球面三角形
天文学や航海術では一つの角が直角の場合が多く、この場合公式は簡単になる
R2\sin a= \sin A \sin c
まさにこれですね。
本書の中での式
自分の頭を整理するために図で書いてみました。
Aが地球の中心、Bが衛星がいる場所 Dが昇降点 Eが衛星から赤道面に垂線をおろした場所、FはEからADに垂線をおろした場所、CがAE延長して地球表面との交点です。
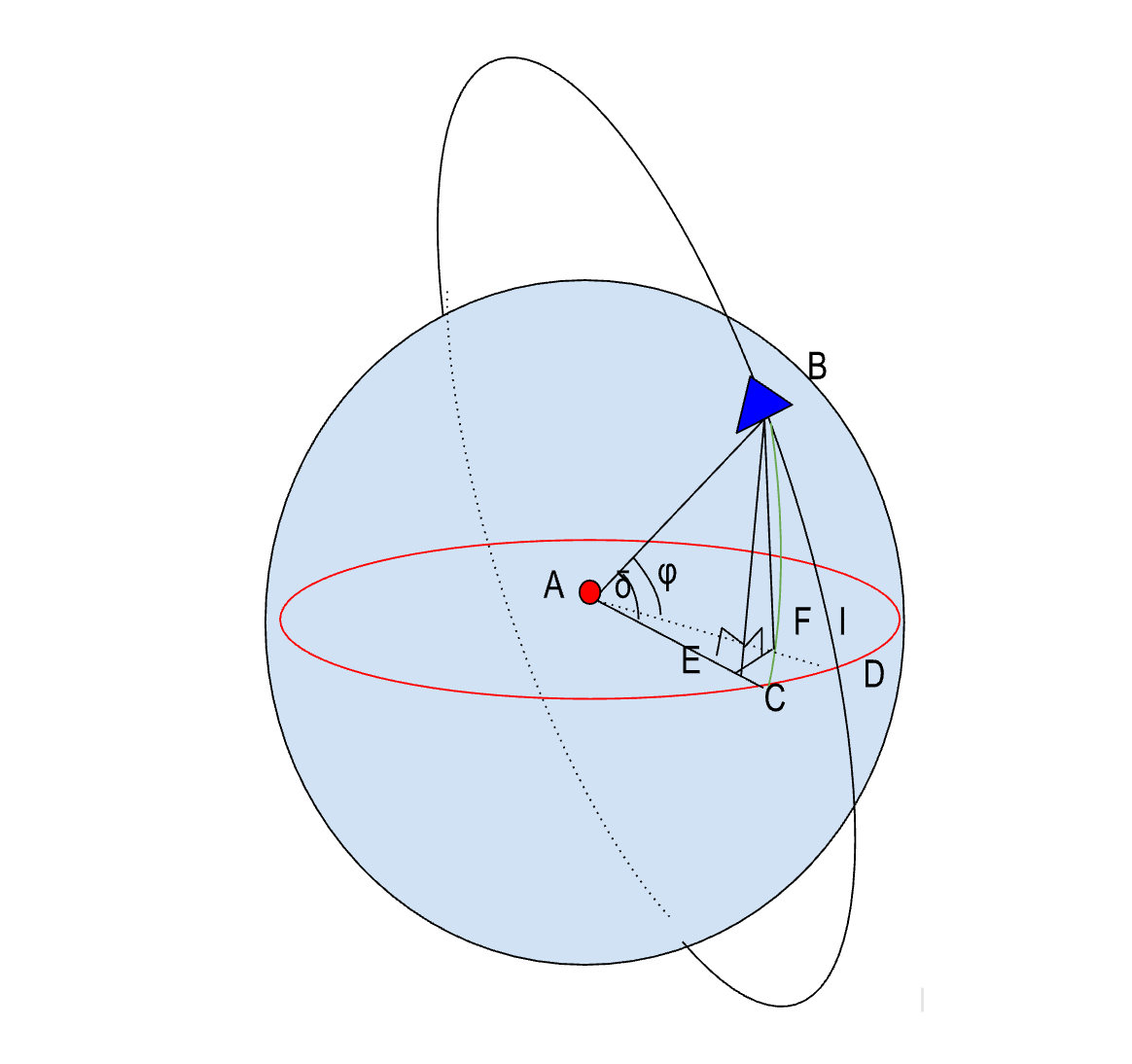
回答3.1
起動の半径を1として、の球から切り出される直角三角形BEA, BEFの関係をると,
三角関数公式: https://manabitimes.jp/math/660
負角の公式
補角の公式
また、
よって下記が導けました
天体の位置を地平座標系(観測者の真上の方向=天頂 (zenith) と、天頂を通り南北を結ぶ大円=子午線により定義される。観測者を通り、観測者から天頂に向かう方向に垂直な平面により、地平線(horizon)を定義。)から赤道座標系(地球の自転軸を基準にした座標系、地球の赤道を基準とする)へ変換する際に使用される三つの数学的な式が示されています。
問題3.2
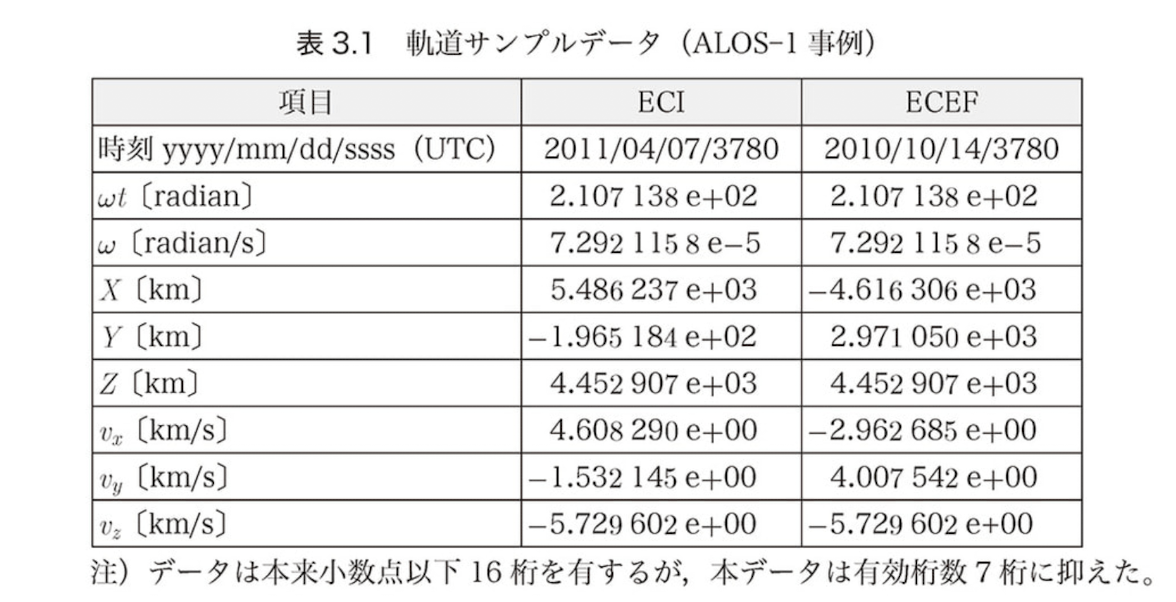
表3.1の ECI, ECEFの変換を確認しなさい
言葉の理解
素人には表をみただけではさっぱり分からないので、第3章を読み進めて
ECI, ECEF, 座標変換について理解を進めます。
座標系について
-
ECI(Earth-Centered Inertial):
慣性系で、地球の重心を中心にしていますが、地球の自転は考慮しません。恒星に対して固定された座標系とみなされます。 -
ECEF(Earth-Centered Earth-Fixed):
地球の自転と同期している座標系で、地球の重心を中心にして地表とともに回転します。
変換プロセス
-
時間の調整:
ECEF座標系は地球の自転に依存するため、時刻をUTCまたはGPS時に同期させる必要があります。変換には、変換を行う正確な時刻が必要です。 -
回転行列の計算:
地球の自転を表す回転行列を計算するために、グリニッジ恒星時(Greenwich Sidereal Time, GST)または地球回転角(Earth Rotation Angle, ERA)を計算します。これは地球の自転角度で、UT1やUTCといった時刻尺度から導出されます。 -
座標の回転:
ECI座標系の位置と速度ベクトルをECEF座標系に変換するために、回転行列を使用して座標を回転させます。これは、地球の自転による回転を座標変換に適用することに相当します。 -
極運動の補正:
ECEF座標系は地球表面に固定されているため、極運動(地球の極のわずかな動き)による補正も考慮する必要があります。このため、国際地球回転・基準系サービス(IERS)から提供される極運動データを使用します。 -
最終的な座標の変換:
補正された回転行列と極運動データを使用して、ECI座標系からECEF座標系への最終的な変換を行います。
数式
第三章 (3.28)
一般に、ECEF座標
ここで、
速度ベクトルも同様に、角速度を考慮した回転により変換されます。
ここで
第3章(3.33)
速度 (3.34)
加速度 (3.35)
回答3.2
上記問題3.1 に記載した表の1行目の時刻が2列でちがうのは理解ができていません。そこは無視をするとして2行目の
import numpy as np
import math
# 地球の自転速度(角速度)をラジアン/秒で定義
EARTH_ROTATION_RATE = 7.2921158e-5 # rad/s
def to_radians(degrees):
return degrees * math.pi / 180
def to_deg(rad):
return rad * 180/math.pi
def eci_to_ecef(eci_coords, eci_velocity, gst):
"""
ECEF座標系からECI座標系への変換を行う。
:param ecicoords: ECI座標系での位置ベクトル (x, y, z) [km]
:param eci_velocity: ECI座標系での速度ベクトル (vx, vy, vz) [km/s]
:param gst: グリニッジ恒星時 [rad]
:return: ECEF座標系での位置ベクトルと速度ベクトル
"""
# 回転行列(Z軸周りの回転)
rotation_matrix = np.array([
[np.cos(gst), np.sin(gst), 0],
[-np.sin(gst), np.cos(gst), 0],
[0, 0, 1]
])
# 座標変換
ecef_coords = np.dot(rotation_matrix, eci_coords)
# 速度に対する回転の影響を考慮
omega_matrix = np.array([0, 0, EARTH_ROTATION_RATE]) # rad/s
# 速度変換
ecef_velocity = eci_velocity - np.cross(omega_matrix,eci_coords)
return ecef_coords, ecef_velocity
gst = to_radians(2.107138e+02)
# 例:ECI座標と速度
eci_coords = np.array([5.486237e+03, -1.965184e+02,4.452907e+03]) # km
eci_velocity = np.array([4.608290, -1.532145,-5.729602]) # km/s
# 座標変換
ecef_coords, ecef_velocity = eci_to_ecef(eci_coords, eci_velocity, gst)
print("ECEF Coordinates:", ecef_coords)
print("ECEF Velocity:", ecef_velocity)
--
ECEF Coordinates: [-4616.30681041 2971.04818774 4452.907 ]
ECEF Velocity: [ 4.59395965 -1.93220776 -5.729602 ]
最初計算するとまったく変換結果があわなかったのですが、
(この本誤植がそこそこある気がします。)
速度の方は、変換した結果と表ECEFの値が一致しません。色々考えましたが一旦Giveupします。
問題3.3
式3.8, 3.10から
をもとめなさい C(r)
(3.8)
\dfrac{1}{2}v^2 - \dfrac{MG}{r}=C(r)
rは地球中心から衛星までの距離 v は衛星の速さ Mは地球の質量、Gは重力定数
は時間に依存しない関数で、運動エネルギーと位置エネルギーの和が一定であることを表す。 C(r)
(3.10)
m\dfrac{v^2}{r} = mg_0(\dfrac{r-h}{r})^2 = \dfrac{GMm}{r^2}
v=(r-h)\sqrt{\dfrac{g_0}{r}} = \sqrt{\dfrac{GM}{r}}
mは人工衛星の質量 h は人工衛星の高度地球表面の重力加速度 g_0
GMは重力定数と地球質量の積
言葉の理解
慣性座標系内ではニュートンの運動方程式が成立する
第一法則:物体は力が加わらない限り同じ速度で動き続ける
第二法則:力は質量と加速度の積である
第三法則:作用と反作用は大きさが等しく作用の方向が反対である
重力定数
万有引力の公式を知っている必要がある:
万有引力の公式
質量 M,mの2質点の間には,万有引力が働く。2点の距離を
rとするとき,万有引力の大きさは
人工衛星におけるエネルギー保存の法則
式3.8 は、衛星の運動エネルギーと重力ポテンシャルエネルギーの和が一定であることを表すとありますが、どういう意味なのかいまいちピントきません。GPTにわかりやすい解説をお願いしてみました。
力学の「エネルギー保存の法則」を示しています。この法則は特に閉じた系で、外部からの力が働かない場合に成立します。
式は次のようになります:
ここで、
-
\frac{1}{2}v^2 v -
\frac{MG}{r} M G r -
C(r)
この式の右辺の定数
この式からわかることは、衛星の速度が増加すれば(運動エネルギーが増加すれば)、ポテンシャルエネルギーが減少する(つまり、衛星が地球から遠ざかる)ということです。逆に、衛星が地球に近づく(ポテンシャルエネルギーが増加する)場合、速度は減少します。
実際には、このエネルギー保存の法則は、衛星の軌道を設計したり、既存の軌道の動きを解析したりする際に重要です。さらに詳細な分析では、軌道が時間と共にどのように変化するかを見るために、衛星の位置、速度、加速度などを含む微分方程式を解く必要があります。
第一宇宙速度
こちらの解説が本書よりもさらにわかりやすかったです。 式3.10 は、人工衛星の遠心力と、重力がつりあっている、つまり落下もせず、遠くにもいかない速度のことを説明しているということが理解できました。
回答3.3
3.8のvに3.10 を代入します。
よって、
これは地球の周りを周回している人工衛星における、エネルギーの総和は重力定数X地球質量 (
Discussion