🤖
Maker Faire Tokyo 2024で展示したmicro:bitラジコンのつくりかた
Maker Faire Tokyo 2024のmicro:bit champions & friendsにて、micro:bitを使用した展示を行います。
展示品のつくりかた(回路とプログラム)について紹介します。
🏛️展示
下記が、展示の構成となります。

ラジコン側は、以下のブロックで構成されています。

📌各ブロックの説明
- サーボモータの制御
- モータドライバ側(アームクローラ制御)
- ラジコンの足(クローラ)の部分
- 超音波センサー
- 距離を測るためのセンサーです
- 電源周り
コードは、Microsoftが提供しているMakeCodeベースで記載します。
基本的な使い方は、チュートリアル等で確認いただくとして、ポイントのみ記載します。
👋サーボモータの制御
ラジコンの手の部分となります。
2つのサーボモータを使い、右手と左手にそれぞれの制御となります。
部品
| 部品名 | 個数 | 備考 |
|---|---|---|
| SG90 | 2 | 4.5 - 6V動作 |
接続図

| micro:bit | 接続先 | 備考 |
|---|---|---|
| P1 | SG90 Data | - |
| P2 | SG90 Data | - |
| GND | 電源のGND | - |
※電源の5V側をSG90の電源と電源側のGNDとSG90のGNDと接続します。
制御
- 右手を振る動作となります
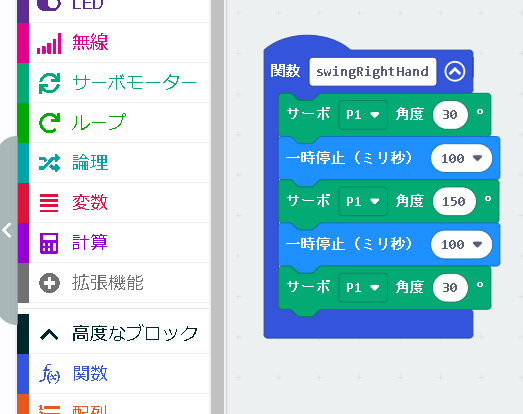
- "サーボモーター"のブロックは、"拡張機能"からservoと検索して使用できます
🛞モータドライバ側(アームクローラ制御)
ラジコンの足の部分となります。
タミヤアームクローラを使用します。
2つのDCモータが付属しており、モータドライバを介して制御します。
部品
| 部品名 | 個数 | 備考 |
|---|---|---|
| DCモータ | 2 | 1.5 - 3V動作(アームクローラ付属) |
| DRV8835 | 1 | モータドライバ 秋月電子 |
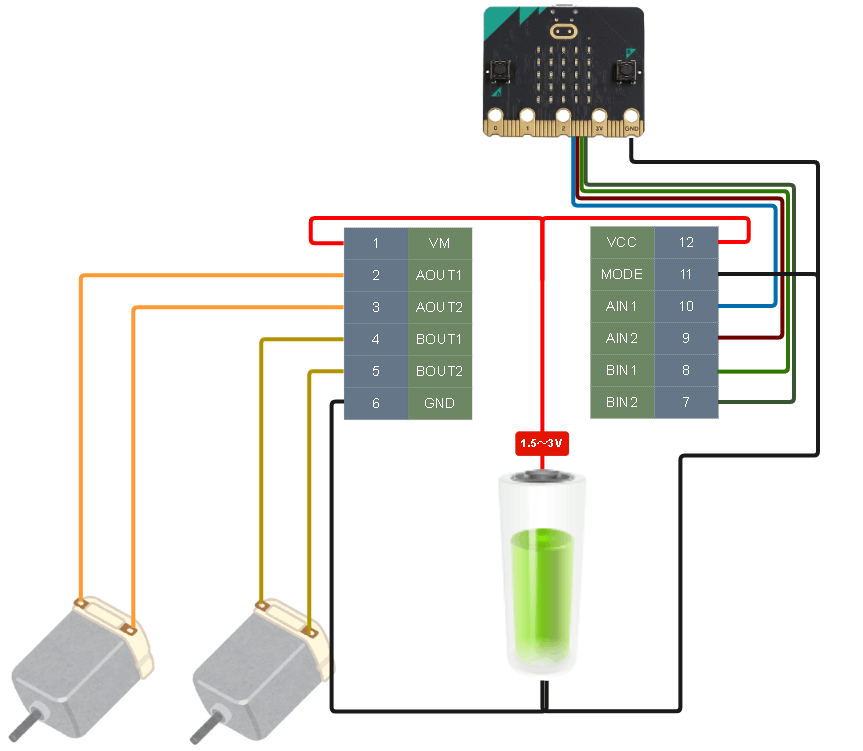
接続図
| micro:bit | DRV8835 | DCモータ | 備考 |
|---|---|---|---|
| P13 | AIN1 | - | - |
| P14 | AIN2 | - | - |
| P15 | BIN1 | - | - |
| P16 | BIN2 | - | - |
| - | AOUT1 | o | - |
| - | AOUT2 | o | - |
| - | BOUT1 | o | - |
| - | BOUT2 | o | - |
| - | VCC, VM | - | 電源+に接続 |
| - | MODE, GND | - | 電源-に接続 |
DRV8835補足
モータドライバ(DRV8835)にてのモータを制御します。
本ドライバは、DCモータまたはステッピングモータ用のドライバとして使用できます。
カムロボットに搭載されているモータは、DCモータのため、[11]MODEピンをLOW(GND接続)にする必要があります。
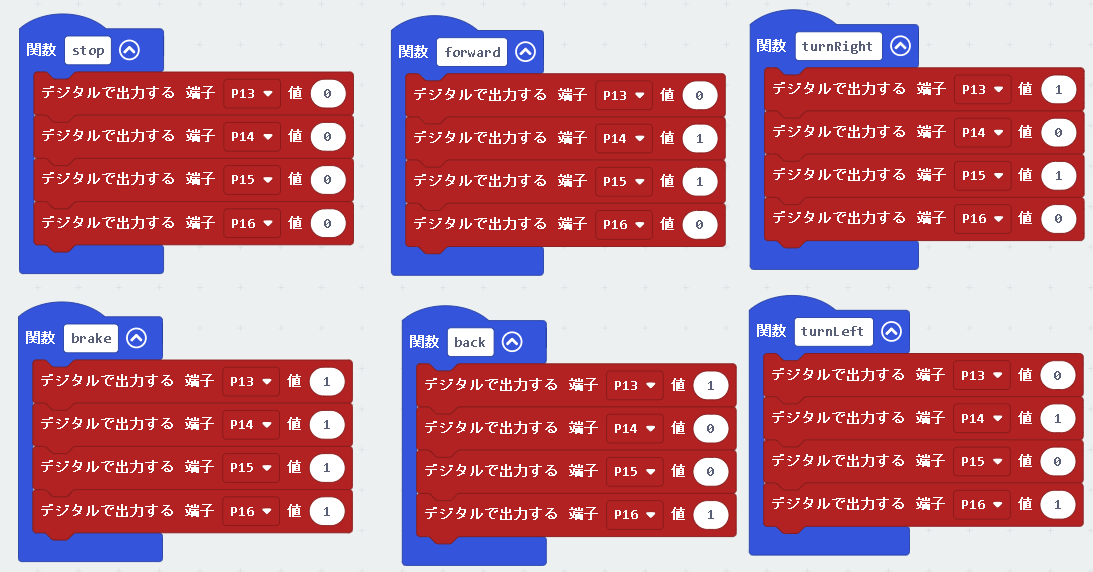
IN1/2に対する正転/逆転/ブレーキの関係は以下となります。
| xIN1 | xIN2 | xOUT1 | xOUT2 | 動作 | コード上の紐づけ |
|---|---|---|---|---|---|
| 0 | 0 | HiZ | HiZ | 空転 | stop |
| 0 | 1 | L | H | 逆転 | back |
| 1 | 0 | H | L | 正転 | forward |
| 1 | 1 | L | L | ブレーキ | brake |
制御
- 各動作は以下となります
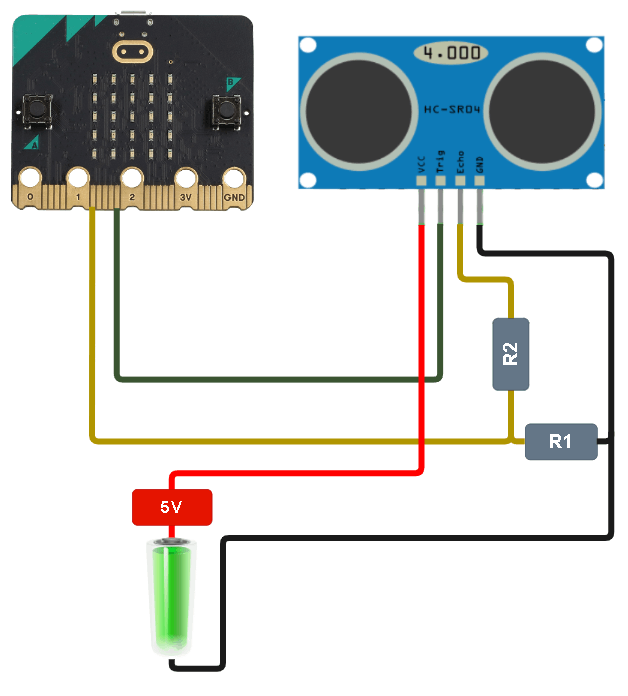
🔊超音波センサー
超音波センサーで距離を測ることができます。
部品
| 部品名 | 個数 | 備考 |
|---|---|---|
| HC0SR04 | 1 | - |
| 抵抗 R1 - 1kΩ | 1 | - |
| 抵抗 R2 - 470Ω | 1 | - |
接続図
| micro:bit | HC0SR04 | 備考 |
|---|---|---|
| P8 | ECHO | - |
| P12 | TRG | - |
| GND | GND | 電源- |
| - | Vdd | 電源+ |
HC0SR04補足
高周波の音波を送信し、反射するまでの時間を計測しています。
モジュールの中では、以下のことを行っています。
- トリガーPINを10us以上HIGHにする
- センサーは、40kHzの音波を送信し、エコー信号があるか検査する
- エコーの信号が検出されたらエコーPINをHIGHに出力する
- 距離は、音速(340m/s)より算出できる
- 主な仕様配下です
- 距離範囲 : 2 ~ 400cm
- 精度 : 15度の範囲
制御
- 計測したデータをシリアル通信で出力します

- "Sonar"のブロックは、"拡張機能"からsonarと検索して使用できます
⚡電源周り
- micro:bit側、各モータへの電源供給についてです。
| 項目 | 定格 | 提供する電圧 |
|---|---|---|
| micro:bit | 1.7~3.6V | 3.3V |
| サーボモータ | 4.5 - 6V | 5V |
| DCモータ | 1.5-3.0V | 2.5V |
| HC0SR04 | 3-5.5V | 5V |
部品
| 部品名 | 個数 | 備考 |
|---|---|---|
| AMS1117-3.3V | 1 | micro:bit供給用 |
| AMS1117-2.5V | 1 | DCモータ供給用 |
| cheero Canvas 3200mAh IoT | 1 | 展示会時は単3電池使用 |
接続図
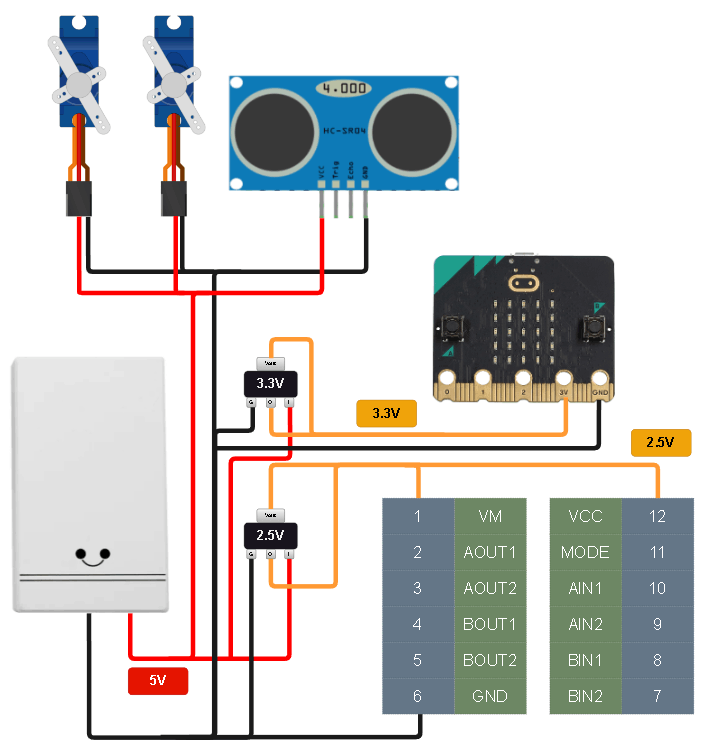
- 最初は、DCモータへの電源供給とmicro:bitを共通にしましたが、
- DCモータの回転時の負荷によって、まれにmicro:bitにリセットがかかることがあり分けました
- セラミックコンデンサコンデンサや電解コンデンサがなくも、動作としては問題ありませんが、入れたほうが無難です
- スクラップにて、波形を見たり、修正の履歴を記載してあります
- 何かの参考になれば↓
さいごに
本展示/記事を書くにあたり、@mame_n さんに協力いただきありがとうございました。
電子工作のコミュニティメンバーの方々には、実装などのお手伝いいただきありがとうございました。
また、アドバイスをいただいたMさんもありがとうございました。
Discussion