知能ロボコンに向けたロボット開発(番外編・テストコース制作)
まえがき
これを書いているのは2025年6月3日。大会まで2週間足らず。会場近くに住んでおらず、事前にコースを走れない自分。なんとか本番に似たフィールド・データが欲しい、と考えたのはGW直前だった。
テストコース制作
ロボット実機にもいくつか問題があり、タイヤに使うOリング購入するためホームセンター向かう。その場でまえがきに書いたことを思いつき、コースを作れないかをその場で思案。壁が黄色だったこと、コースの大きさが2[m]程度だったことから、910x450x4のプラ段2枚を購入。確か1枚500円程度。
ルールブックを見つつ図面を作る。

板だけだと立たないので、サポートを作った。


出来上がったコースはこんな感じ。
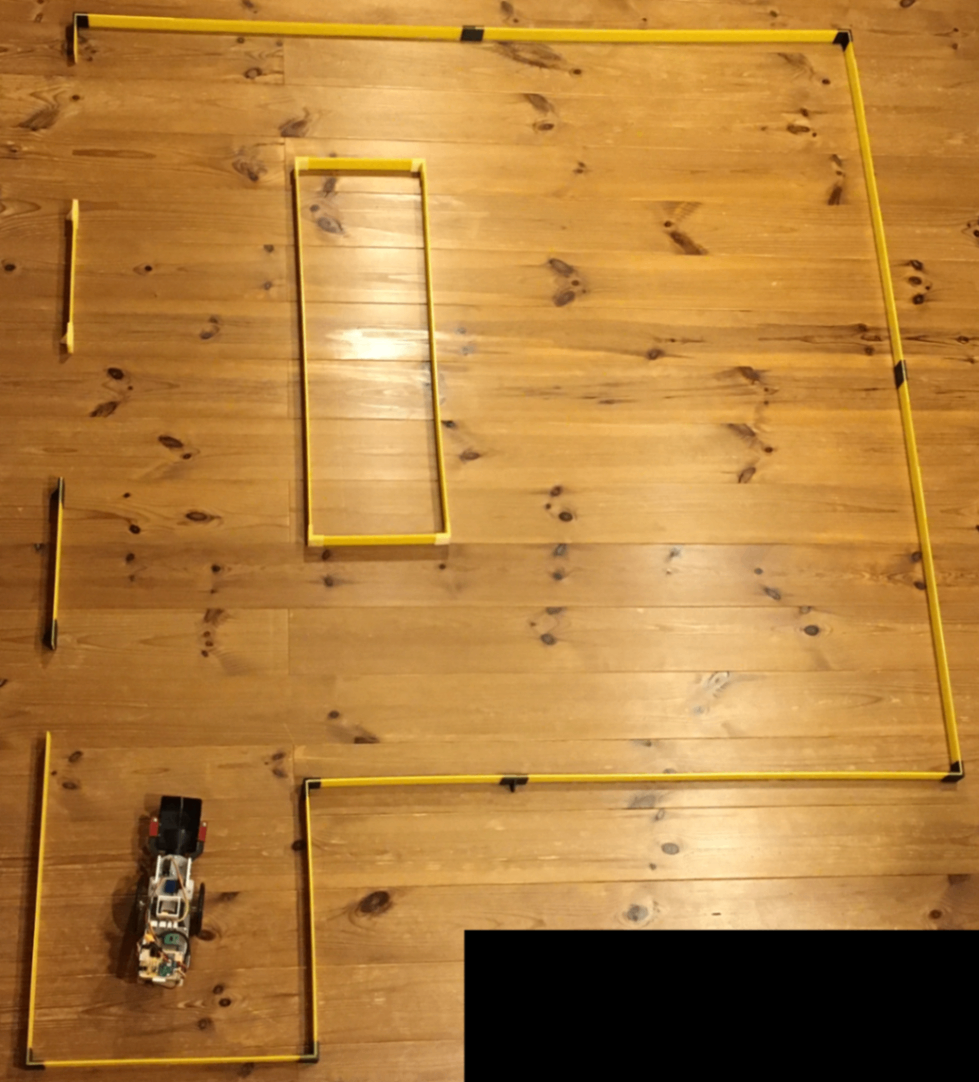
これだけだとゴールの部分がないので後日ゴールの壁を作った。
Nav2で使うマップデータ
作ったロボットはROS 2で動かすのでNav2パッケージを活用する。
そのため、マップデータが必須となる。
そこで、SLAM ToolboxやCartographerを使ってマップデータを取得してみたが、イマイチきれいにマップが取れない。推定原因としては、床が波打ってること。これは家の床材がそういうものなのでどうしようもなかった。
また、このやり方だと、本番環境のマップデータ取得が必須となるが、前日や当日ではそもそもSLAMする時間があるかどうか、コースを使う時間があるかどうかもわからないし、時間があったとしてもきれいなマップが作れるかどうかも課題がある。
マップデータはPGMフォーマットなので、OpenCVで作れないかを考えた。コース自体は単純なので作ろうと思えばGIMPなどでも作れるが、修正することも考えるとプログラム的に作れたほうが嬉しい。
作ってみたら意外とかんたんにできた。

作ったマップを使ってRViz2で表示。

あとがき
ひとまず、作ったコースとデータでパラメータ調整などを行っている。
本番でうまく行くかどうかはわからないが、なんとかなると嬉しい。
Discussion