🤖
【Raspberry Pi】 走行試験です!


走行テスト!
前回、モータを動かしホイールが回りましたので、
いよいよ戦車を走らせてみます。
車体を作成し、前回のダブルギアボックスを取り付けます。
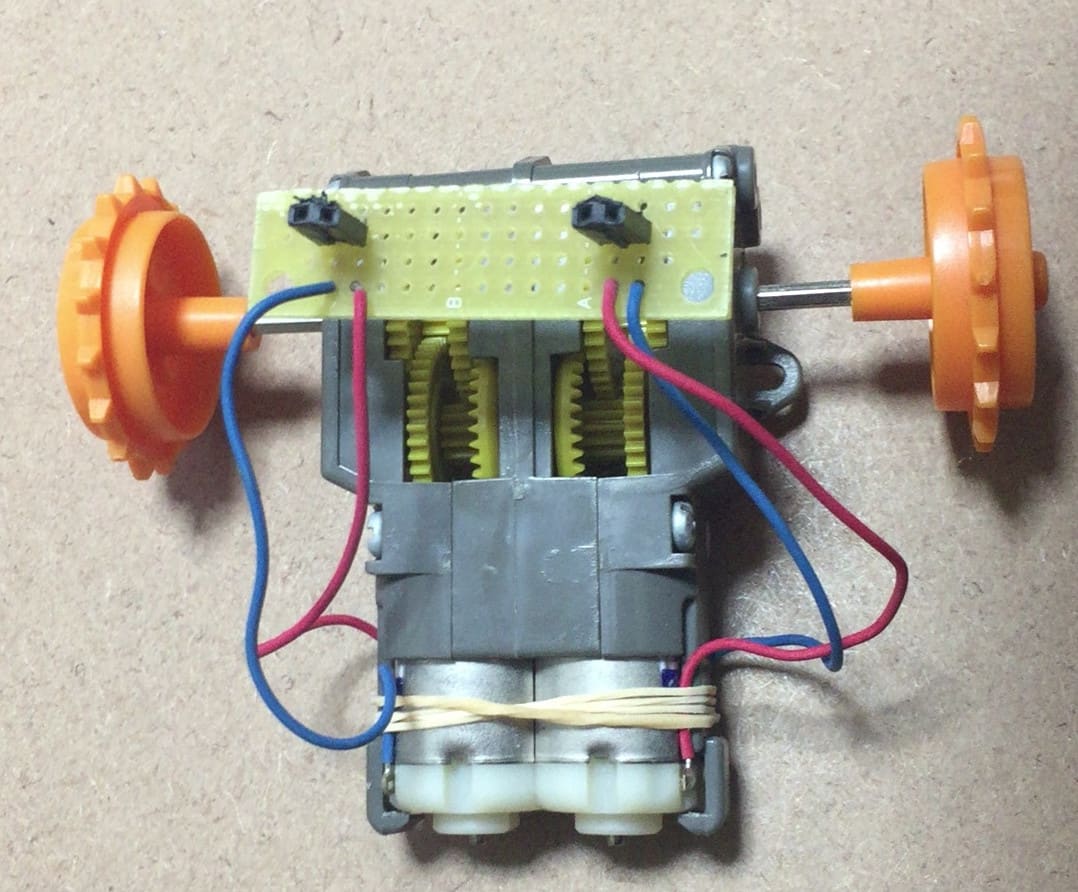
ジャンパーワイヤーが刺しやすいように、ちょっとだけ半田付け。
車体はユニバーサルプレートLサイズを3分割したのもをベースに作成。
今後いろいろ触っていくことを考えると、
小さいほうのユニバーサルプレートだとちょっと小さく感じました・・・。
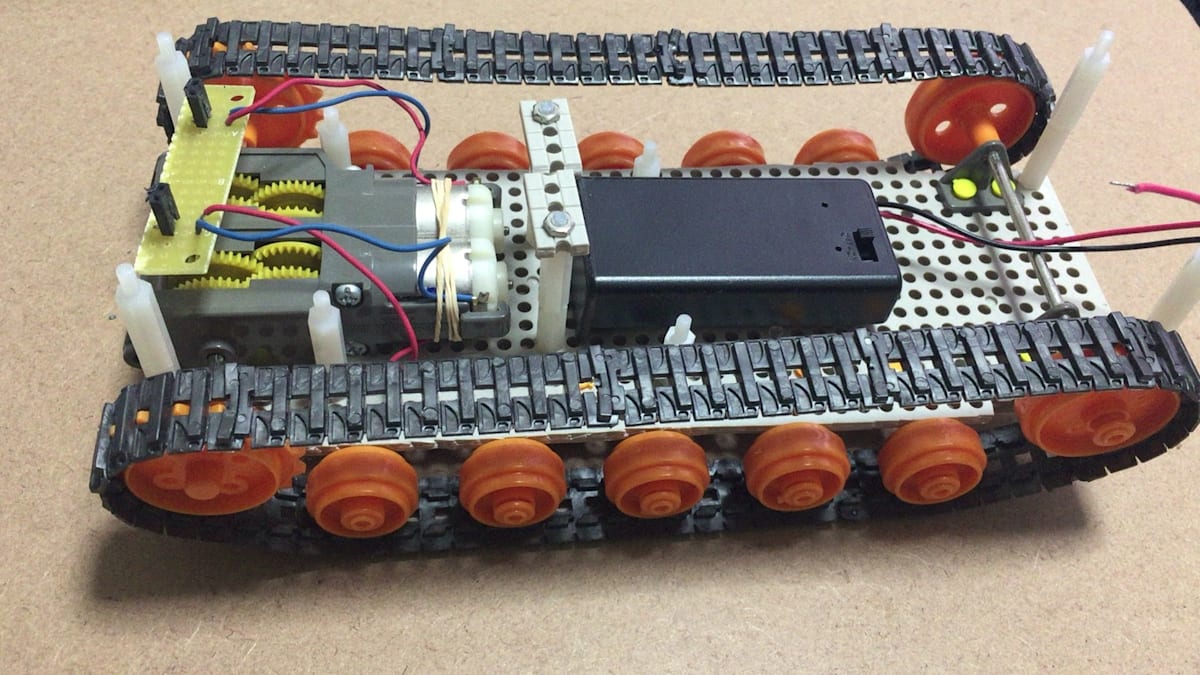
スペーサーなどを利用して適当に作ります。
スペーサーも沢山あると安心します!
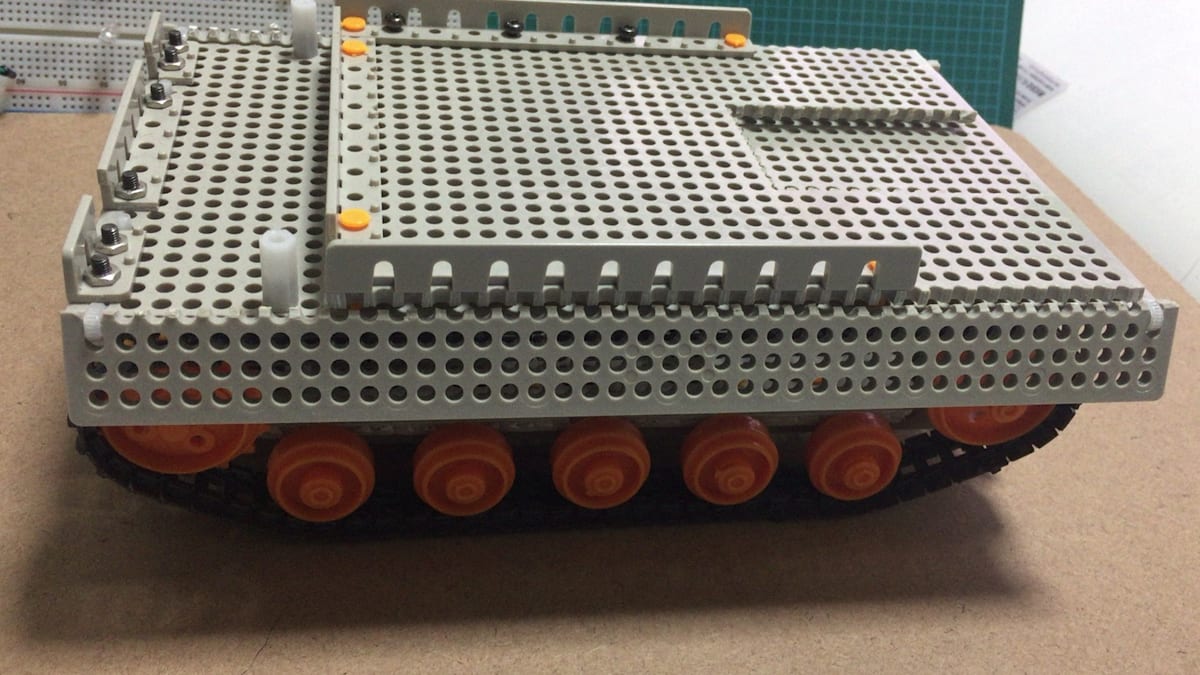
それっぽくしてみます。
10式戦車見ながら作ってました。
ユニバーサルプレートをたくさんに使います。
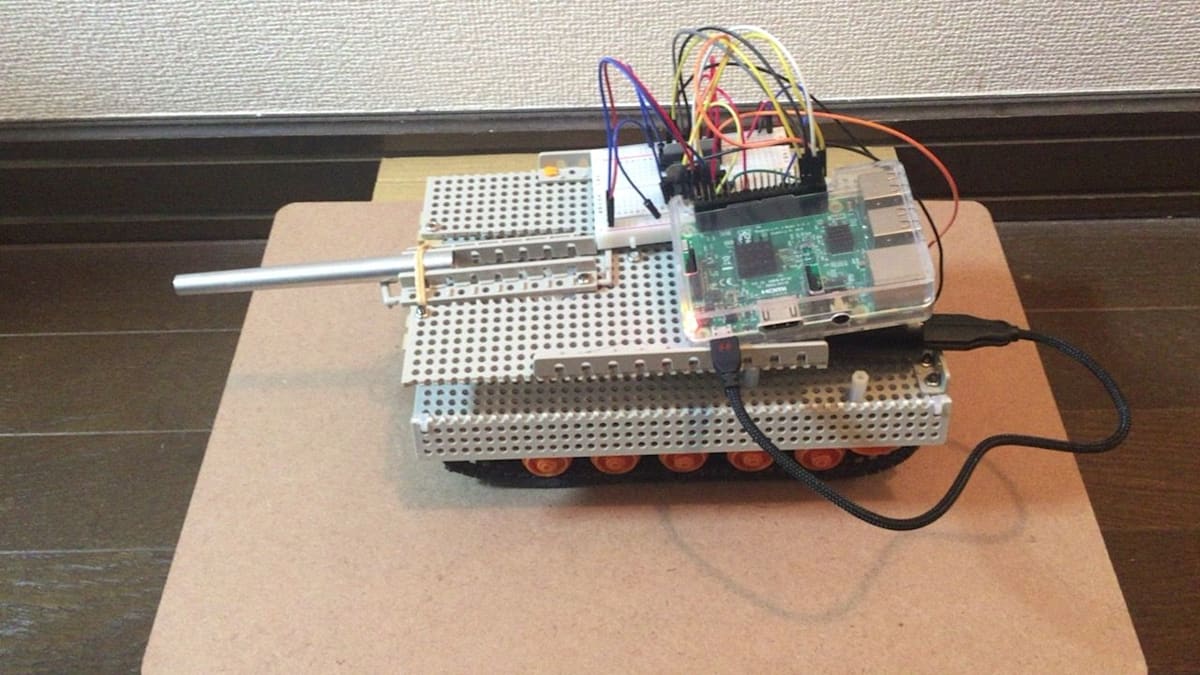
仮の砲身をとりつけ、フル装備してみました。
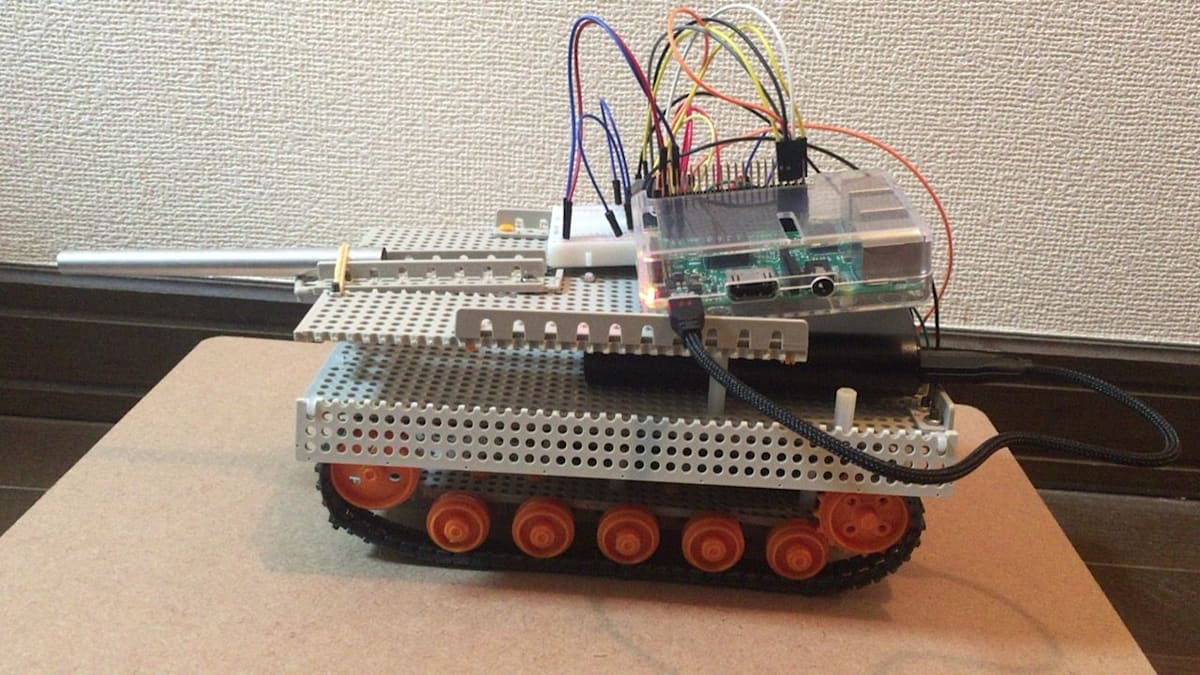
ジャンパなどのケーブルが目立ちますが、走行には問題ないかな。
車体作りもなかなか楽しく、いろいろ試していると部品の消耗が激しい。
砲身は、某プラモで使われているガチのやつで、パーツだけお取り寄せしました。
いよいよ走行テストです。
コントローラなんてものは無いので、前回のプログラムをベースに実行します。
例によってギアのギシギシ音がしますので、音量注意です。(グリス忘れてました...)

・・・遅い。思いの外遅かったです。
パーツだけで回すよりも遅くなるのは当然ですが...
ダブルギアボックスは、ギア比の調整が可能で、当初スピード重視で組み立てましたが、
殆ど動かず、低速高トルクにしてみたんですが、遅い・・・
重戦車イメージしているので、そんなに早くなくても良いのですが、
気になります。
まとめ
とりあえ走るようになったが、課題は多い。
まだまだ BattleBots への道は遠いですね。
(目指してません)
追記
動画が音ズレしちゃってますね・・・。
元ファイルは問題なさそうなのですが・・・。
Discussion