📖 Unityエンジニアの視点で学ぶMuJoCo入門
「ロボットの動作をリアルにシミュレーションしたい!」
そう思ったことはありませんか?
Unityは、リアルタイムレンダリングや直感的な開発環境を活かして、ゲームやVRアプリ開発に最適なプラットフォームです。しかし、物理シミュレーションの精度やロボティクス向けの機能においては、より特化したツールが求められます。
そこで登場するのが、MuJoCo(Multi-Joint dynamics with Contact) です。
MuJoCoは、高速かつ精度の高い物理シミュレーションを提供し、ロボットの動作や物体間の接触計算に優れています。Google DeepMindをはじめとする研究機関や企業でも広く使われており、強化学習やロボティクス分野での応用が進んでいます。
こんな人にオススメ!
✅ Unityで物理シミュレーションを試したことがあるが、精度に不満がある人
✅ MuJoCoに興味があるが、どこから始めればよいか分からない人
✅ XMLの書き方を学びつつ、シミュレーションを改造してみたい人
🔹 UnityとMuJoCo、何が違うの?
UnityとMuJoCoは、どちらも物理シミュレーションが可能ですが、その目的が異なります。
| Unity | MuJoCo | |
|---|---|---|
| 用途 | ゲーム・VR・インタラクティブコンテンツ | ロボティクス・強化学習・科学シミュレーション |
| 物理エンジン | NVIDIA PhysX | 専用の高精度エンジン |
| 操作方法 | GUI(エディタでオブジェクト配置) | XMLやスクリプトで定義 |
| 計算精度 | リアルタイム処理向け(近似計算) | 高精度な物理計算 |
つまり、「見た目やゲーム向けの物理ならUnity、ロボットや高精度なシミュレーションならMuJoCo」 という使い分けが適しています。
より具体的には例えるとこうですかね。
- UnityのPhysXは、剛体シミュレーションのため、関節の柔軟性や接触計算が粗い。
- MuJoCoは、接触力・摩擦の計算精度が高く、逆動力学解析も可能。
- 強化学習において、Unity ML-AgentsではMuJoCoのような精密な接触計算ができない。
今回は、まず 「MuJoCoの基本」 を学び、サンプルXMLファイルを解析しながら、その仕組みを理解していきます。
MuJoCoがどのように動作するのかを体験しながら、次回以降の「ロボットモデルの作成」に繋げていきましょう!
🛠 まずはMuJoCoを触ってみよう!
それでは、最初にMuJoCoのサンプルシミュレーションを見て、モチベーションを上げましょう!
📺 参考動画:
この動画では、MuJoCoを使ったリアルなシミュレーションの例を見ることができます。
「こんなシミュレーションが作れるのか!」と感じたら、早速MuJoCoを触っていきましょう。
🔍 MuJoCoのシミュレーターを使ってみる
MuJoCoには、XMLファイルを読み込んでシミュレーションを実行できる「標準のシミュレーター」 が付属しています。
まずはこれを使って、サンプルXMLを開いてみましょう。
💡 手順
-
MuJoCoをインストールすると、下図のアイコンがデスクトップまたはアプリケーションフォルダに追加されます。
このアイコンをダブルクリックして、シミュレーターを起動しましょう。 -
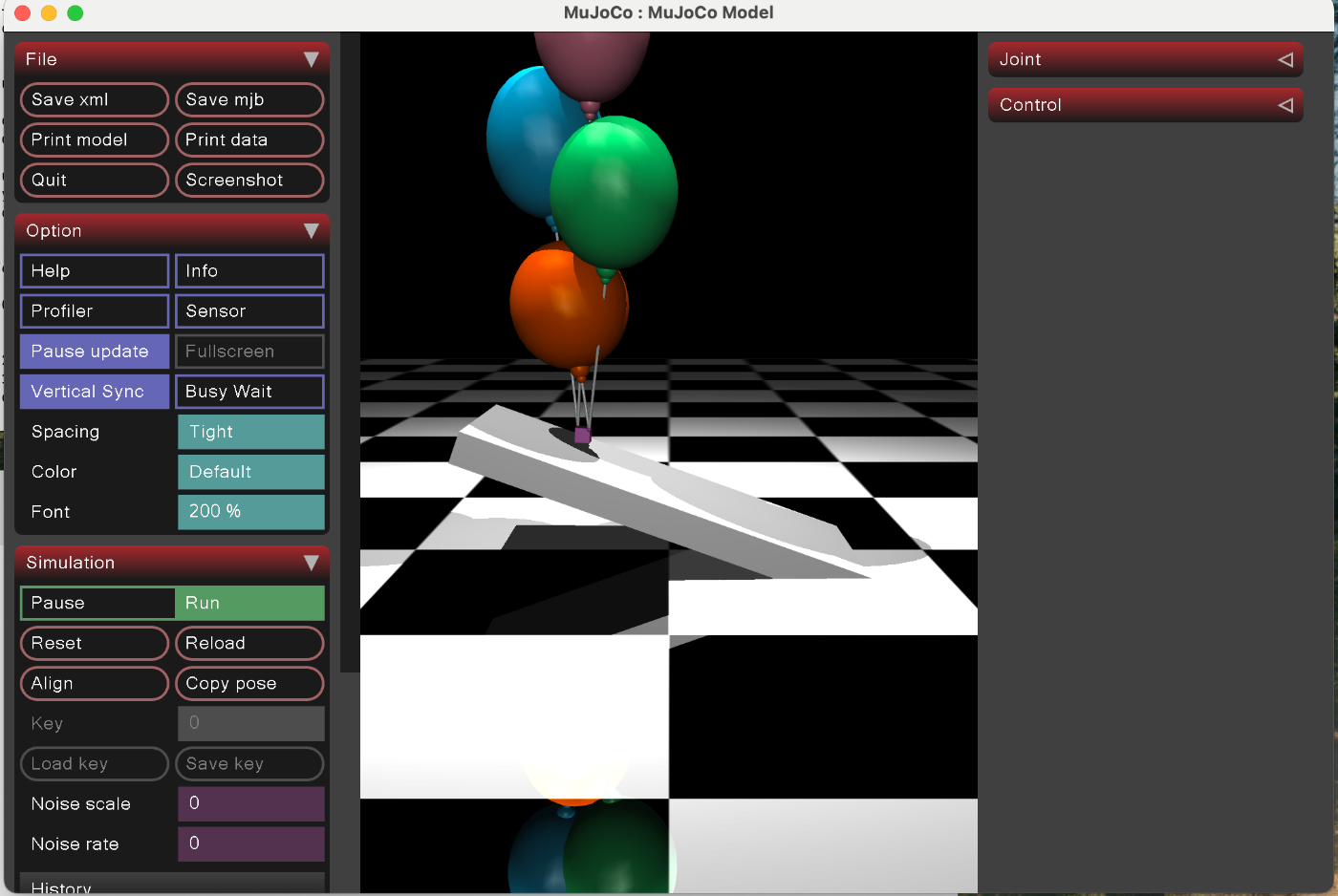
シミュレーターが起動すると、下図のようなウィンドウが表示されます。
-
サンプルのXMLファイルをドラッグ&ドロップ すると、シミュレーションが開始されます!


これで、MuJoCoのシミュレーション環境が整いました!
次に、XMLファイルの中身を解析し、シミュレーションの仕組みを理解していきましょう。
✏️ サンプルXMLファイルを理解しよう
MuJoCoではモデルの定義にXMLファイルを用います。そして、サンプルとして選んだ xml ファイルはバルーンのサンプルです。
このXMLファイルは、MuJoCoでバルーン(風船)を用いたシミュレーションを実現するための設定ファイルです。このXMLファイルは、MuJoCoのシミュレーションにおける基本的な設定を一通り網羅しています。
- オプションでシミュレーションの基本パラメータを設定し、
- ビジュアルで見た目を調整、
- デフォルトで各要素の共通プロパティをまとめ、
- アセットでシーンに使用するリソースを定義し、
- ワールドボディで実際のシーンのオブジェクトを配置、
- 腱で各オブジェクト間の連結を実現しています。
<mujoco>
<option density="1.204" viscosity="1.8e-5" integrator="implicit"/>
<visual>
<global elevation="-10"/>
</visual>
<default>
<tendon limited="true" width="0.003" rgba="1 1 1 1"/>
<geom friction=".2"/>
<default class="weight">
<geom rgba=".8 .4 .8 1"/>
<site rgba=".8 .4 .8 1"/>
</default>
<default class="balloon">
<!--
0.167 is the MKS density of helium at room temperature.
Note this does not take into account the mass of the rubber,
which is likely not insignificant.
-->
<geom density="0.167" fluidshape="ellipsoid"/>
<default class="pink">
<geom rgba="1 .6 .7 1"/>
<site rgba="1 .6 .7 1"/>
</default>
<default class="blue">
<geom rgba=".3 .7 .9 1"/>
<site rgba=".3 .7 .9 1"/>
</default>
<default class="green">
<geom rgba=".4 .9 .5 1"/>
<site rgba=".4 .9 .5 1"/>
</default>
<default class="orange">
<geom rgba="1 .4 0 1"/>
<site rgba="1 .4 0 1"/>
</default>
</default>
</default>
<asset>
<texture name="grid" type="2d" builtin="checker" width="512" height="512" rgb2="0 0 0" rgb1="1 1 1"/>
<material name="grid" texture="grid" texrepeat="2 2" texuniform="true" reflectance=".6"/>
</asset>
<worldbody>
<geom name="ground" type="plane" size="5 5 .05" pos="0 0 -.5" material="grid"/>
<geom name="ramp" type="box" size=".4 .2 .03" pos="0 0 -.4" euler="0 20 0" rgba="1 1 1 1"/>
<body name="weight" childclass="weight" pos=".3 0 .2">
<freejoint/>
<light pos="1 0 3" dir="-1 0 -3" mode="trackcom"/>
<light pos="-1 0 3" dir="1 0 -3" mode="trackcom"/>
<!-- The mass of the weight was chosen to be slightly bigger than the total buoyancy of the balloons. -->
<geom name="weight" type="box" size=".015 .015 .015" mass=".0347"/>
<site name="weight1" pos=" .013 .013 .013" size="0.005"/>
<site name="weight2" pos="-.013 -.013 .013" size="0.005"/>
</body>
<!-- The gravcomp value of 7.2 is the ratio of air and helium densities at room temperature. -->
<body name="pink" gravcomp="7.2" pos="-.2 .1 .2" childclass="pink">
<freejoint />
<geom name="pink" type="ellipsoid" size=".11 .11 .15"/>
<geom name="pink_knot" pos="0 0 -.15" size=".02"/>
<site name="pink" pos="0 0 -.17" size="0.01"/>
</body>
<body name="blue" gravcomp="7.2" pos=".1 .1 .2" childclass="blue">
<freejoint />
<geom name="blue" type="ellipsoid" size=".12 .12 .15"/>
<geom name="blue_knot" pos="0 0 -.15" size=".02"/>
<site name="blue" pos="0 0 -.17" size="0.01"/>
</body>
<body name="green" gravcomp="7.2" pos=".1 -.1 .2" childclass="green">
<freejoint />
<geom name="green" type="ellipsoid" size=".12 .12 .14"/>
<geom name="green_knot" pos="0 0 -.14" size=".02"/>
<site name="green" pos="0 0 -.16" size="0.01"/>
</body>
<body name="orange" gravcomp="7.2" pos="-.12 -.12 .2" childclass="orange">
<freejoint />
<geom name="orange" type="ellipsoid" size=".12 .12 .13"/>
<geom name="orange_knot" pos="0 0 -.13" size=".02"/>
<site name="orange" pos="0 0 -.15" size="0.01"/>
</body>
</worldbody>
<tendon>
<spatial range="0 0.6">
<site site="pink"/>
<site site="weight1"/>
</spatial>
<spatial range="0 0.4">
<site site="blue"/>
<site site="weight1"/>
</spatial>
<spatial range="0 0.3">
<site site="green"/>
<site site="weight2"/>
</spatial>
<spatial range="0 0.5">
<site site="orange"/>
<site site="weight2"/>
</spatial>
</tendon>
</mujoco>
全体は <mujoco> タグで囲まれており、その中でシミュレーションのオプション、ビジュアル設定、デフォルトのプロパティ、リソース(アセット)、シーン(ワールドボディ)、そして連結用の腱(tendon)が定義されています。
詳細は、付録を参照ください。
ちょっと理解を確かめる
ここまでChatGPTなどを活用して、MuJoCoの基本的な設定やXMLファイルの構造について大体の概要を掴むことができました。ここからは、実際に自分で手を動かして得た実践的な理解をご紹介します。
このサンプルでは、バルーンがあるのに浮かび上がらない現象に気づいたので、パラメータを変更して、実際にバルーンを浮かべてみることにしました。
ポイントは、gravcomp です。XML内のコメントには以下のように記載されています:
he gravcomp value of 7.2 is the ratio of air and helium densities at room temperature.
つまり、これはヘリウムの浮力に関わるパラメータであり、この値を調整すればバルーンの浮力が大きくなるはずです。実際にこの値を変更してみた結果、バルーンが見事に浮かび上がるようになりました。
その結果は、下記の動画でご確認いただけます:
📝 まとめ
今回は、MuJoCoの基本概念とXMLの解析を行い、実際にバルーンのシミュレーションを修正してみました。
MuJoCoは、XMLを使ってモデルを定義し、物理シミュレーションを動かす という流れが基本です。
一見シンプルですが、細かいパラメータ調整ができるので、ロボットシミュレーションやAI学習にも応用できます。
次回は、TurtleBot3のモデルをMuJoCoで作成し、実際にロボットの物理シミュレーションを動かしてみます!
「実際のロボットをシミュレートするにはどうすればいい?」を考えながら進めていきましょう。
👉 次回:「MuJoCoでTurtleBot3を作ってみる」 もお楽しみに!
付録
ここでは、balloons.xmlの細かな設定内容を解説します。
1. シミュレーションの基本オプションとビジュアル設定
<option> タグ
<option density="1.204" viscosity="1.8e-5" integrator="implicit"/>
- density: シミュレーション内で使用する空気などの流体の密度を指定しています。ここでは 1.204(おそらく kg/m³)と設定されています。
- viscosity: 流体の粘性を示すパラメータです。値は 1.8e-5 となっており、現実の空気の粘性に近い値です。
- integrator: 数値積分の方法を指定しています。「implicit」は、剛性の高いシミュレーションにおいて安定性を高めるために選ばれる方法です。
<visual> タグ
<visual>
<global elevation="-10"/>
</visual>
- global elevation: カメラの視点やシーン全体の見え方に影響します。ここではシーンを少し見下ろす形にするため、elevation を -10 に設定しています。
2. デフォルト設定とクラス
<default> タグ
デフォルト設定では、共通で使用するパラメータやスタイルを定義しています。これにより、各要素で同じ設定を繰り返さずに済むようになっています。
<default>
<tendon limited="true" width="0.003" rgba="1 1 1 1"/>
<geom friction=".2"/>
...
</default>
-
tendon: 腱(tendon)のデフォルト設定。
limited="true"により、腱の伸び縮みが制限され、widthやrgbaで見た目の太さや色を指定しています。 - geom: 幾何学要素のデフォルト設定。ここでは摩擦係数を 0.2 に設定しており、全体の接触挙動に影響します。
ちなみに、tendonという言葉は最初はイメージしづらかったのですが、実際は下図のような、物体を接続する細い糸のようなものを指しています。実際のシミュレーションでも、この腱が物体同士を柔軟に連結する役割を果たしています。

サブクラス設定
デフォルト設定内では、さらにクラス分けがされています。たとえば、weight クラスと balloon クラスが定義されています。
-
<default class="weight">
ここでは、重りに関する見た目の設定が行われています。<geom>と<site>で、色(rgba)が指定されています。 -
<default class="balloon">
風船に関する基本設定です。- density="0.167": ヘリウムの密度に近い値を設定しており、風船の浮力計算に影響します。
-
fluidshape="ellipsoid": 風船の形状が楕円体として扱われます。
さらに、balloonクラス内にサブクラス(pink,blue,green,orange)が定義され、それぞれの色や外観が細かく設定されています。
3. アセット(資産)の定義
<asset> タグ
<asset>
<texture name="grid" type="2d" builtin="checker" width="512" height="512" rgb2="0 0 0" rgb1="1 1 1"/>
<material name="grid" texture="grid" texrepeat="2 2" texuniform="true" reflectance=".6"/>
</asset>
- texture: 「grid」という名前のテクスチャを定義。ここでは、チェック柄(checker)が指定され、白と黒で構成される画像が生成されます。
-
material: 上記のテクスチャを利用して、材質「grid」を作成。
texrepeatやreflectanceを設定することで、地面などの見た目を制御します。
4. ワールドボディ(シーン)の定義
<worldbody> タグ
シーン内のオブジェクト(地面、斜面、風船、重りなど)が定義されます。
<worldbody>
<geom name="ground" type="plane" size="5 5 .05" pos="0 0 -.5" material="grid"/>
<geom name="ramp" type="box" size=".4 .2 .03" pos="0 0 -.4" euler="0 20 0" rgba="1 1 1 1"/>
...
</worldbody>
-
地面 (
ground)-
type="plane": 無限平面を表現。 -
sizeとposで大きさや位置を指定。 -
material="grid"により、先に定義したチェック柄のマテリアルが適用されます。
-
-
斜面 (
ramp)-
type="box"として、直方体を表現し、euler属性で回転(ここでは20度)を与えています。
-
各 <body> タグ
-
重り (
weight)-
childclass="weight"を指定して、デフォルト設定(重り用)の外観を引き継ぎます。 -
<freejoint/>により自由度の高いジョイントを持たせ、シーン内で動かせるようにしています。 - 内部で
<geom>や<site>タグを使って、実際の形状や参照点(サイト)を定義しています。
-
-
風船 (
pink,blue,green,orange)- それぞれの
<body>タグで風船を表現。gravcomp(重力補償)属性により、空気とヘリウムの浮力の比率が反映されます。 - 各風船も
<freejoint/>を持ち、楕円体の形状が<geom>タグで定義されています。 -
<site>タグは、後の腱の接続ポイントとして使われています。
- それぞれの
5. 腱(Tendon)の定義
<tendon> タグ
<tendon>
<spatial range="0 0.6">
<site site="pink"/>
<site site="weight1"/>
</spatial>
...
</tendon>
-
spatial タグ
各<spatial>要素は、2つの<site>を接続しており、物理的な拘束(伸び縮みの制限)をシミュレーションします。-
range属性で許容される伸び縮みの範囲が設定されています。 - 例えば、最初の
<spatial>では、風船(pink)と重りの一部(weight1)が接続されています。
-
Discussion