💬
論文:Automatic Annotation of Segmentation Masks for Object Manipulation
Invisible Marker: Automatic Annotation of Segmentation Masks for Object Manipulation
- 不定形なものを自動アノテーションする手法について提案している論文
- 最近は自動アノテーションの研究がどれくらい発展しているのか気になっているので読んでみたが、これはなかなかトリッキーなことをしている感じ(面白い)
概要
- Invisible marker を使ったアノテーション自動化手法についての論文[1]
- 液体などの不定形のものに対して(アノテーションコストが高いものに対して)自動的にアノテーションする手法を提案している
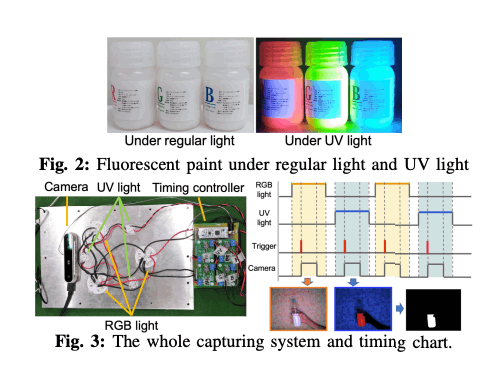
- 通常の光では見えないが、UV光で見えるようなマーカーを使っている
自動アノテーションについて
Automatic Annotation については各種研究が進んでいるようで次の4種類に大別される
オブジェクトそれ自身の特徴を使うもの
温度であったり背景差分であったりで、アノテーションを自動化するという発想のもの。この場合イメージの中に複数同一の特徴を持ったオブジェクトがある場合はアノテーションが失敗する。
- Detection and tracking of liquids with fully convolutional networks
- Evaluation of background subtraction techniques for video surveillance
特殊なマーカーを使うもの
ARマーカーのような特別な情報を付与してアノテーションを実施するというもの。ただしマーカーが特異でなければならない(ある程度一般的なマーカーであった場合、区別がつかなくなる)。
- Learning 6D Object Pose Estimation using 3D Object Coordinates
- Ssd-6d: Making rgb-based 3d detection and 6d pose estimation great again
より特殊なマーカーを使うもの
特殊なデバイスでのみ認識できる特殊なマーカーを使用するケース。
シミュレーション
シミュレーションを用いて人工的なデータセットを作ることができる。ただしシミュレーション(=3D合成)にはまだまだ限界があったりして、現実世界のデータと、シミュレーションデータとの乖離を埋める研究が発展している段階。
原理
本手法は特殊なデバイスで認識できる特殊なマーカーを使用した自動アノテーション手法であり、DAQの開発から実施している。通常光とUV光を交互に発行できるシステムを組み上げており、これで対象物を撮影する。UV光の照射環境下では対象物だけが発光しているので適切な閾値処理を実行することでマスクの自動生成が可能となる[2]。
結論・感想
- 自動アノテーション手法を提案しており、コスト削減の可能性を示唆している
- 不定形なもの(水, カーテン)をアノテーションするというニーズがどれくらいあるものなのかは謎すぎたが、ロボティクスへの応用を考えているそう
- ex. 自動で衣服をたたむようなロボットを想定している
Discussion