Coroutinesを理解したい③
Overview
前回の続きから
さまざまなビルダーによって提供されるコルーチン スコープに加えて、coroutineScope ビルダーを使用して独自のスコープを宣言することができます。 コルーチン スコープを作成しますが、起動されたすべての子が完了するまで完了しません。
runBlocking ビルダーと coroutineScope ビルダーは、両方とも本体とそのすべての子の完了を待機するため、似ているように見えます。 主な違いは、runBlocking メソッドは現在のスレッドを待機のためにブロックするのに対し、coroutineScope は単に一時停止し、基礎となるスレッドを他の用途のために解放することです。 その違いにより、runBlocking は通常の関数であり、coroutineScope は一時停止関数です。
summary
任意の中断関数から coroutineScope を使用できます。 たとえば、Hello と World の同時出力を一時停止 fun doWorld() 関数に移動できます。
任意の中断関数から coroutineScope を使用できます。 たとえば、Hello と World の同時出力を一時停止 fun doWorld() 関数に移動できます。
import kotlinx.coroutines.*
fun main() = runBlocking {
doWorld()
}
suspend fun doWorld() = coroutineScope { // this: CoroutineScope
launch {
delay(1000L)
println("World!")
}
println("Hello")
}
前回のコードはこちら。よく見ると、coroutineScopeがないですね!!!
import kotlinx.coroutines.*
fun main() = runBlocking { // これは、コルーチンスコープです
launch { doWorld() }// 新しいコルーチンをバックグラウンドで開始し、続行
println("Hello")
}
// これはあなたのはじめてのsuspend関数です
suspend fun doWorld() {
delay(1000L)
println("World!")
}
thoughts
coroutineScope ビルダーを使用すると、独自のスコープを自分で宣言することができることが理解できた。これいるのだろうかといまだに疑問ですが...
for文で、仮のAPIのデータということにしてるListのデータを1秒ごとにループするコードを書いてみました。
import kotlinx.coroutines.*
fun main() = runBlocking {
doWorld()
}
suspend fun doWorld() = c { // this: CoroutineScope
launch {
// 仮のAPIのデータを再現した変数
val apiData = listOf("晴れ", "雨","曇り","雪","霧")
// 1秒づつfor文で出力
for (i in apiData) {
println(i)
delay(1000L)
}
}
println("call api")
}
もし、CoroutineScopeがない状態でRunするとエラーが出ます!
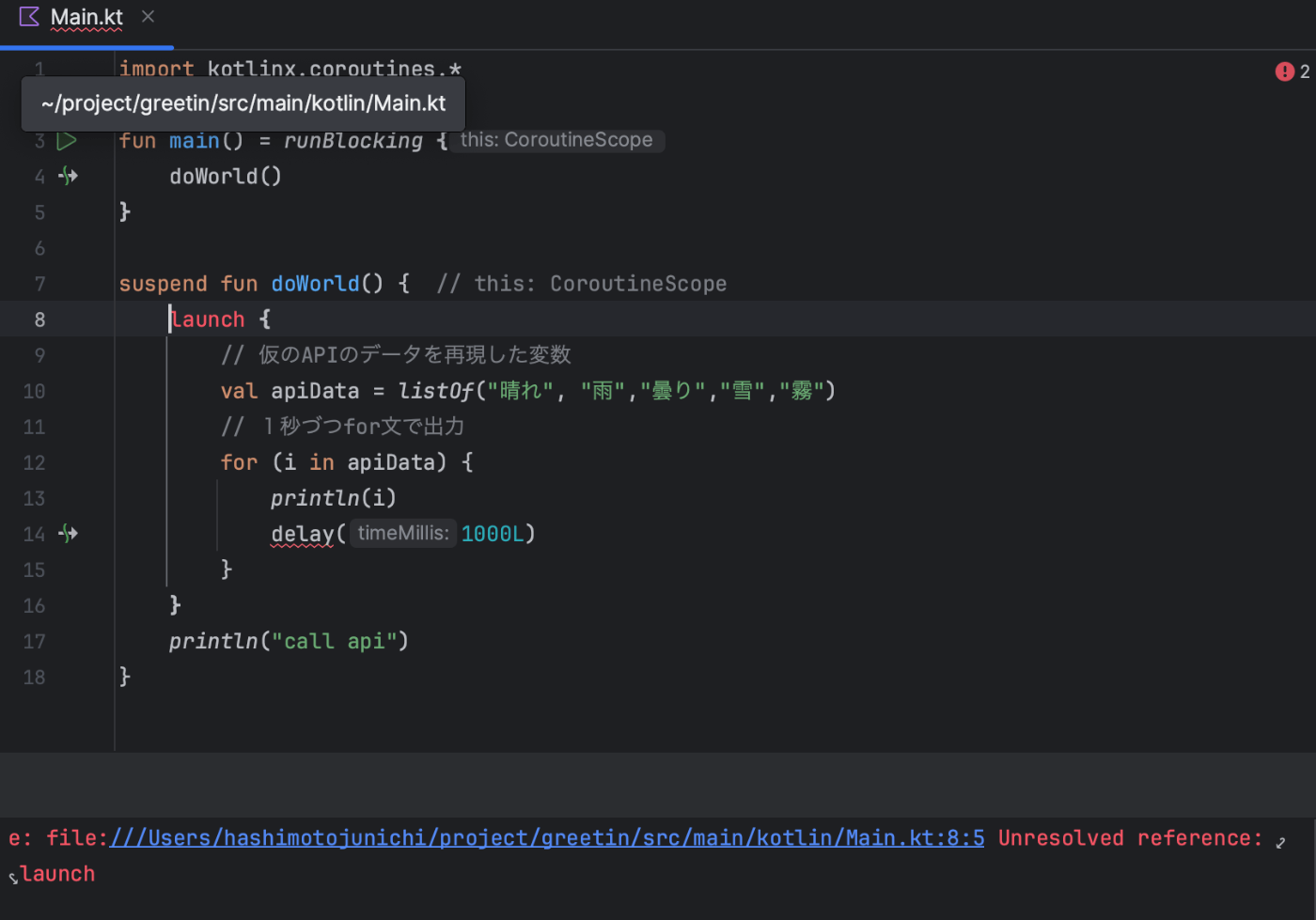
結論。非同居処理がスコープの中で発生しているようで、CoroutineScopeがないとクラッシュしてしまうようです。
Discussion