🐷
20250206_BevFusion

- BevFusion は2つの主要な部分で構成されています。Bevは鳥瞰視点の空間を表し、Fusionはカメラ画像とライダー点群の統合などのマルチモーダルデータ融合を指します。
- BevFusionには3つの融合方法が含まれています。
- 点レベルの融合:LiDARの点群データからサンプリングポイントを抽出し、カメラの内部パラメータと外部パラメータを使用して、画像に投影します。その後、画像の特徴を抽出し、点群と結合します。融合後の点群特徴を用いて3D検出を行います。
- 特徴レベルの融合:マルチモーダルの特徴データを内部パラメータと外部パラメータを用いて投影、結合し、Query クエリを通じて情報を伝達します。
- 点レベル融合と特徴レベル融合の欠点
- どちらの方法も、LiDar点群の点をカメラの内部パラメータと外部パラメータを使用して、画像平面に投影し、特徴を抽出します。
- カメラの内部パラメータは工場出荷時に固定され、変更されません。一方、カメラの外部パラメータは、カメラ座標系とLidar座標系間のマッピング関係を決定します。
- 画像が不鮮明であたっり、点群の座標データが不正確な場合(例えば、センサーのカリブレーション誤差や外部パラメータの誤差がある場合)、マッピングが失敗する可能性があります。
- 点レベル融合と特徴レベル融合どちらもLiDARの点群データを基準にしています。そのため、LiDARのデータが不正確だと3D検出の結果も不正確になります。この方法では、LiDARデータが主であり、カメラデータは補充的な役割を果たします。
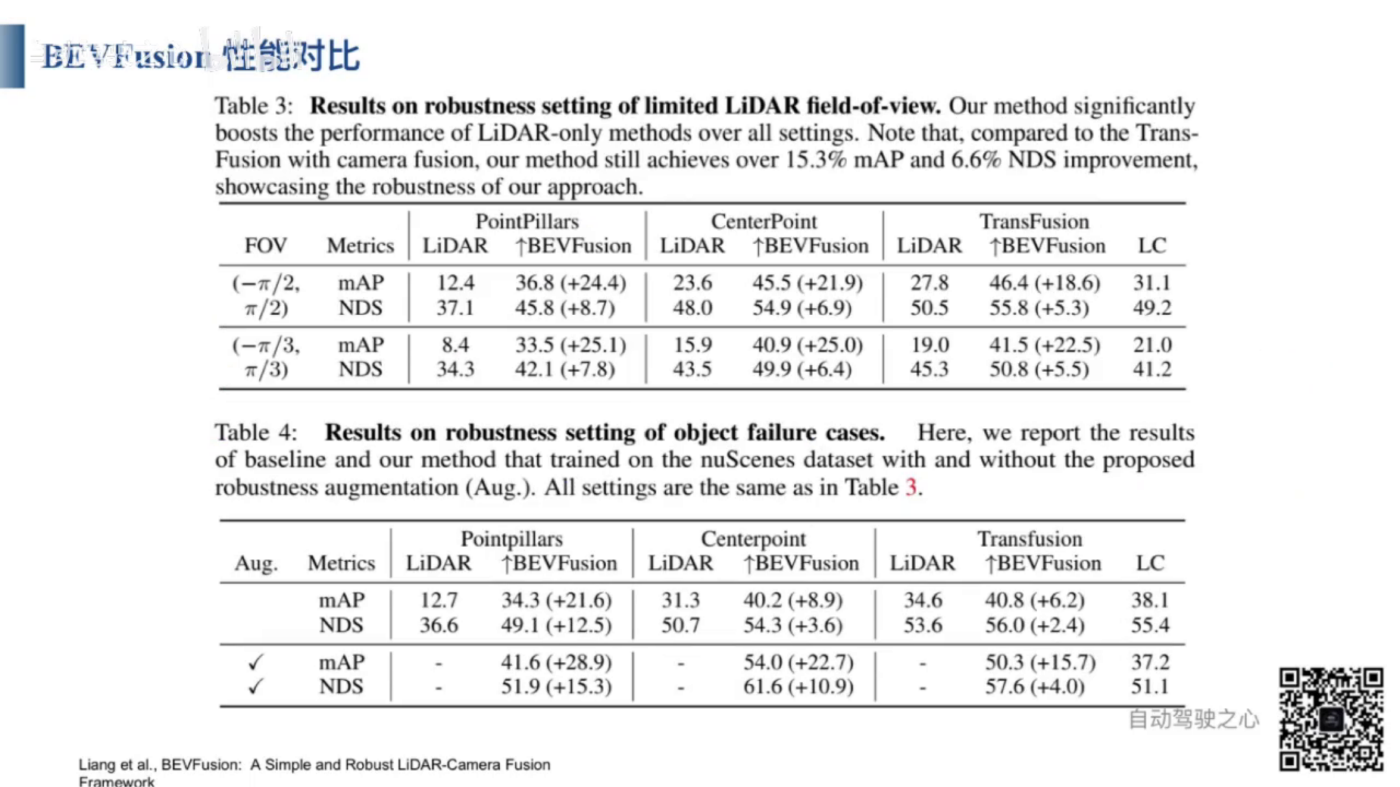
- BevFusionは、CameraNetoworkとLidarNetworkを通じてそれぞれ特徴を抽出し、その後、抽出した特徴を融合します。直接的なマッピングは行わず、主従関係がありません。
- BevFusionには3つの3D検出ヘッドがあります。融合後の特徴に基づく3D検出ヘッド。LiDAR特徴に基づく3D検出ヘッド。画像特徴に基づく3D検出ヘッド。
- 画像特徴とLiDar特徴は、それぞれ独立して動作することも、統合して動作することも可能です。

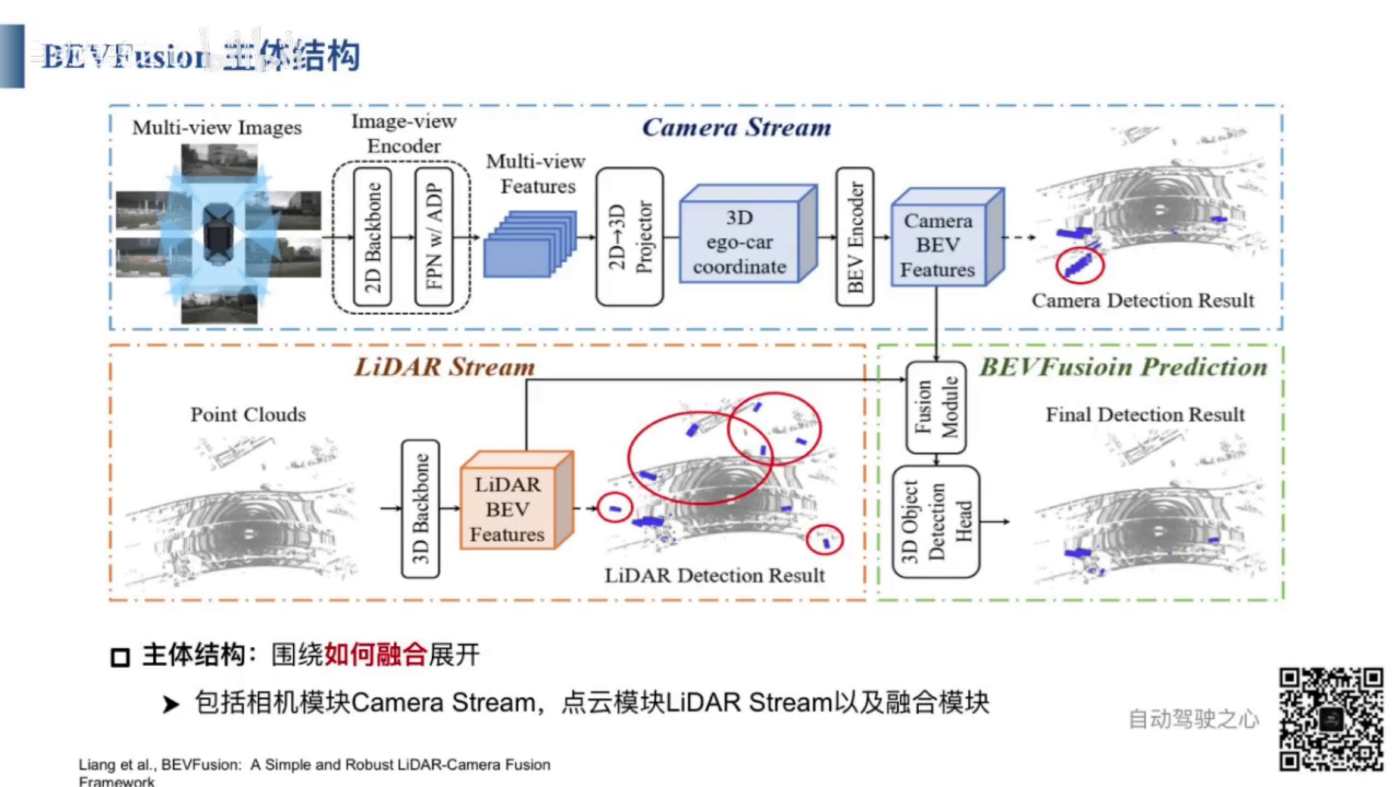
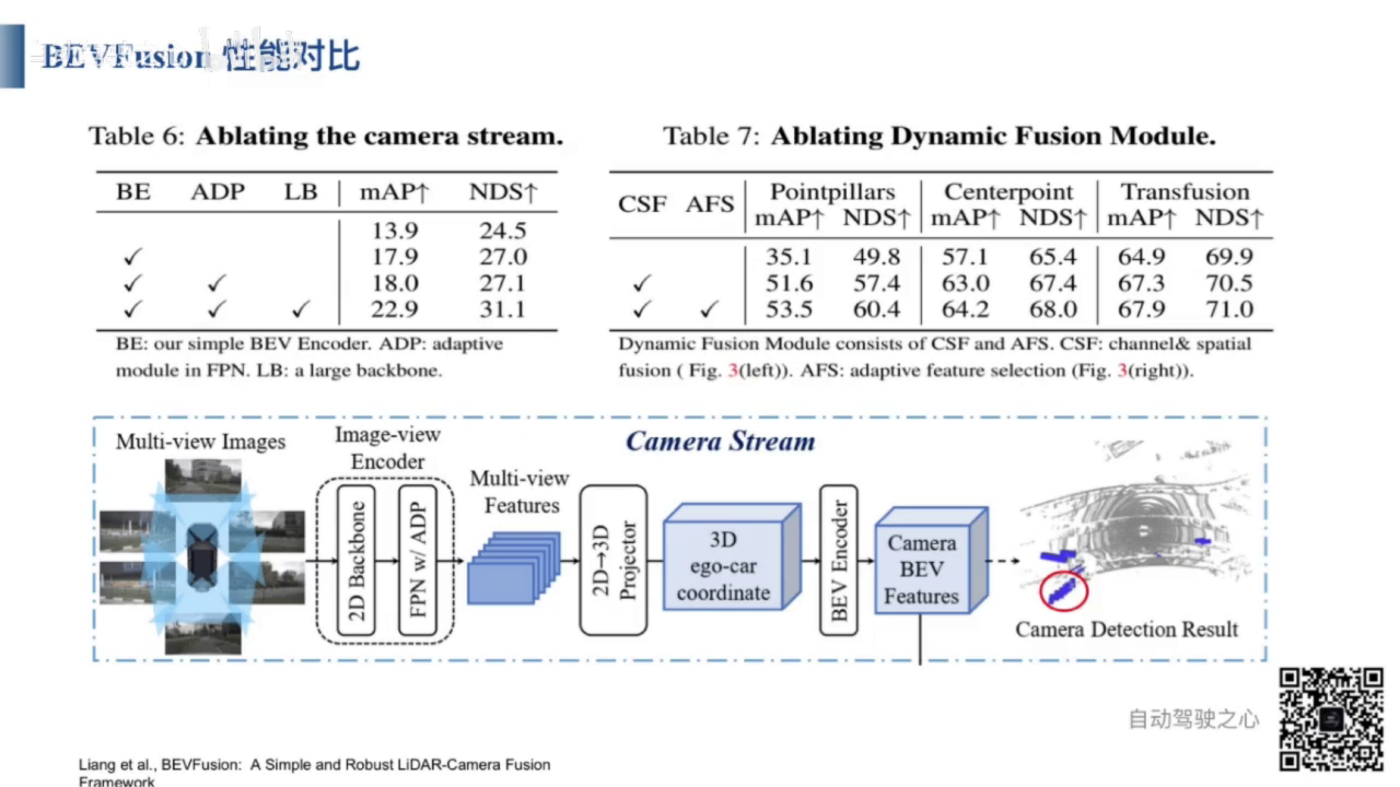
- 画像処理フロー: 入力:マルチビュー画像。出力:画像のBEV空間の特徴。
- まず、画像特徴抽出ネットワークを使用してマルチビュー画像を処理します。次に、抽出されたマルチビュー画像特徴を2dから3dに変換します。その後、3d画像特徴をBEV空間にエンコードし、マルチビュー画像のBEV空間の特徴を取得します。
- 画像のBEV空間の特徴によって、3D物体検出を行うことができます。
- 点群処理フロー: 入力:点群データ、出力:点群のBEV空間の特徴
- まず、点群特徴抽出ネットワークを使用して、点群BEV空間特徴を取得します。一般的な点群特徴抽出ネットワークには、PointNet、PointNet++、VoxelNet、PointPillarなどがあります。
- 点群のBEV空間特徴によって、3D物体検出を行うことができます。
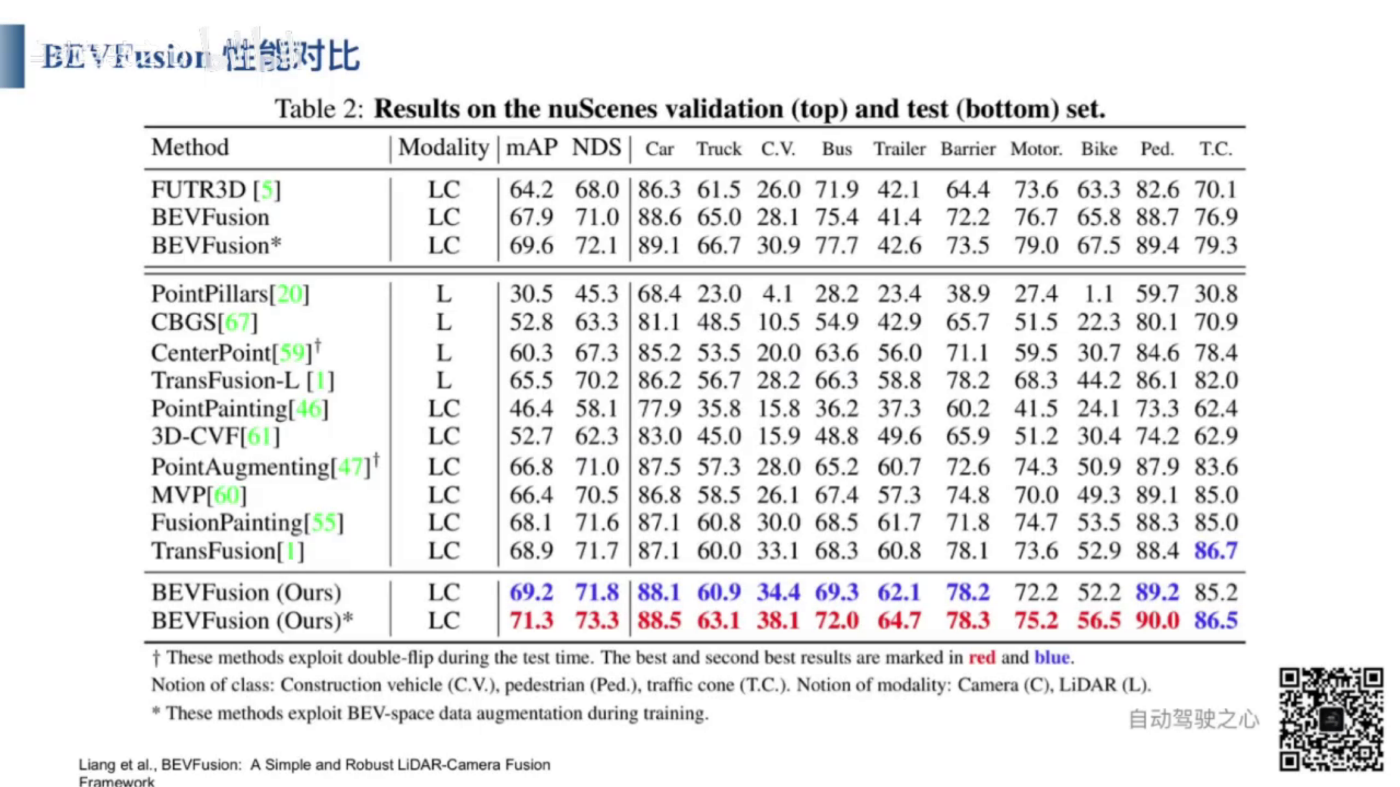
- BEVFusionは画像のBEV空間特徴と点群のBEV空間特徴を融合し、融合したBEV空間特徴を基づいて、3D物体検出を行うことができます。
- BEVFusionはマルチモーダル3D物体検出をサポートだけではなく、シングルモーダルの3D物体検出もサポートしています。例えば、画像のBEV空間特徴に基づく3D物体検出や点群のBEV空間特徴に基づく3D物体検出も可能です。

- 2D画像特徴抽出ネットワークを使用して、各視点の画像を処理する。
- FPNとADPを用いてマルチスケール特徴融合を実施する。FPNは異なるスケールの画像特徴を抽出する。
- 異なるスケールの画像特徴をADPで処理し、アップサンプリング、プーリング、畳み込みを行うことで、同じスケールの特徴を取得し、マルチスケール特徴融合を実現する。
- ADPは適応変形メカリズムであり、異なる形状やスケールの物体に対応し、物体検出やセグメンテーションの精度を向上させる。
- FPN+ADPの設計プロセス、入力:異なるスケール画像特徴 出力:同じスケール融合した画像特徴。処理フロー:1 各層の画像特徴にADPモジュールを適用し、異なるスケール画像特徴から同じスケール画像特徴に変換できます。 2 ADPモジュールには、アップサンプリング、プーリング、畳み込みが含まています。 3 複数の層の画像特徴を融合する。
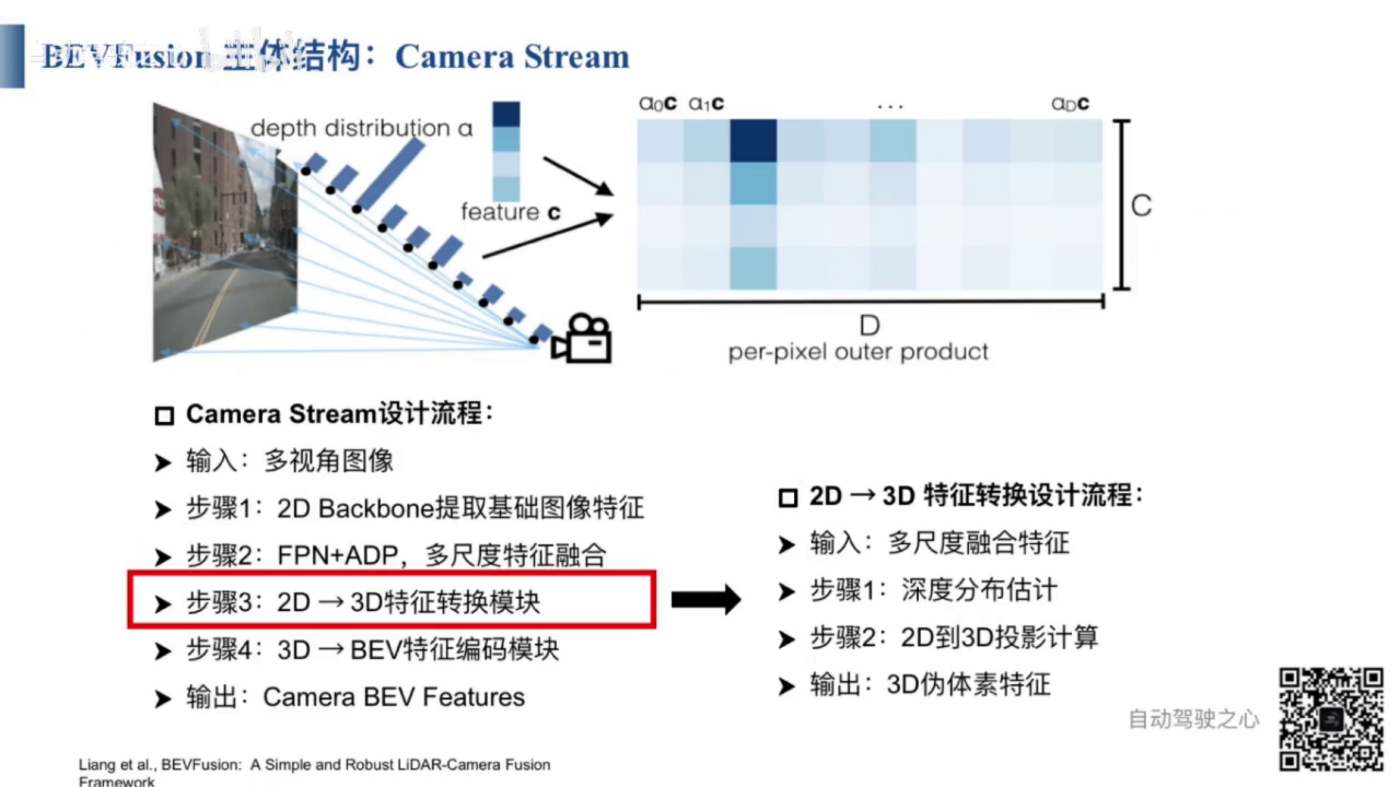
- 2Dから3Dへの特徴変換:2D画像の各ピクセルに対して深度予測を行い、離散的な深度予測確率を得る。
- 確率を重みとして画像特徴と掛け合わせることで、2D画像の3D空間を取得し、3D疑似(ぎじ)ボクセル特徴を形成します。
- 3D疑似ボクセル特徴の処理フロー: 入力:マルチスケール融合特徴。 出力:3D疑似ボクセル特徴。手順:1 深度分布推定を計算。2 2Dから3Dへの投影変換を行う。 3 3D疑似ボクセルを出力する。
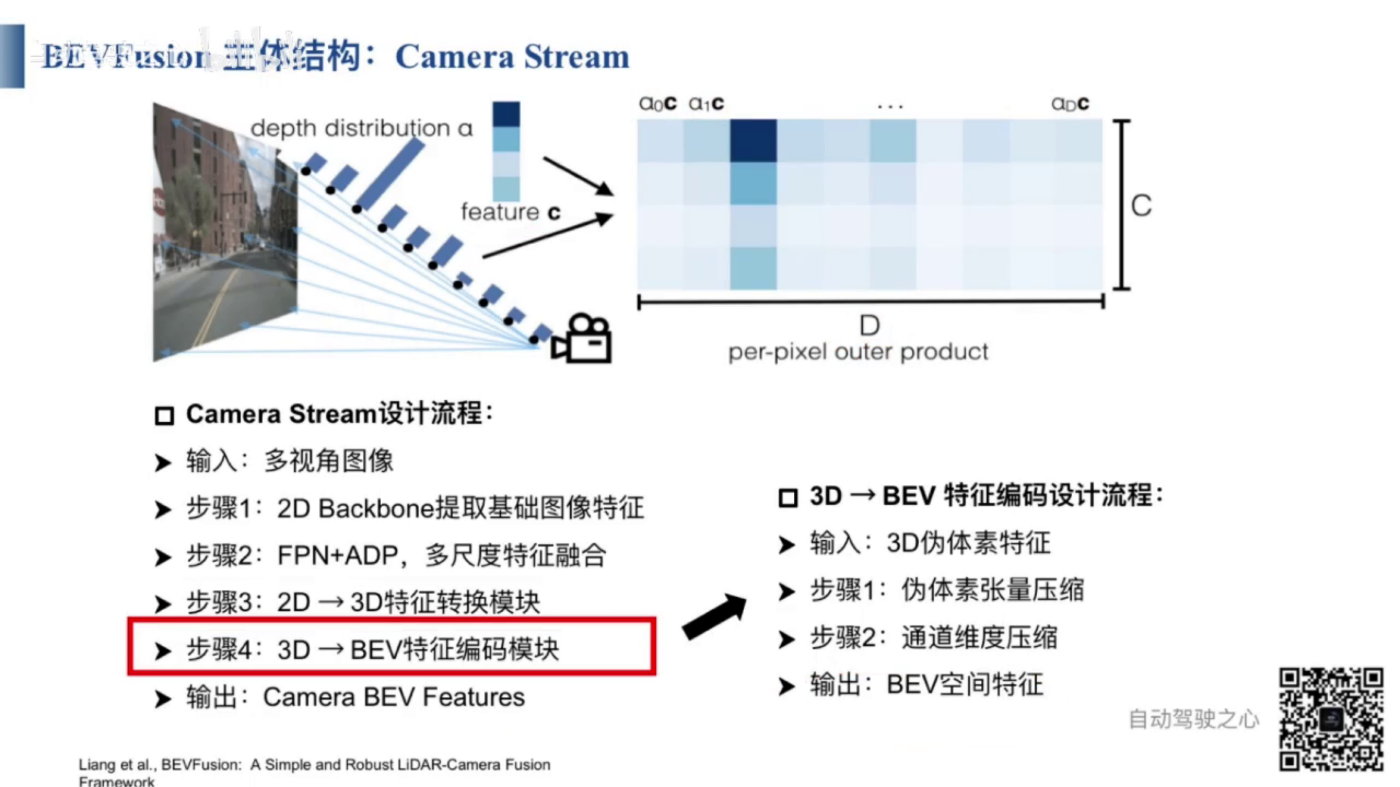
- 3D疑似特徴から2D BEV特徴への変換が行う。
- 俯瞰(ふかん)ビューを利用して、3D特徴から2D BEV特徴に圧縮(あっしゅく)する

- 点群ブランチは3D点群特徴を直接圧縮して、2Dの点群BEV特徴を得る。
- 一般的な3D点群特徴抽出ネットワークには、PointNet、PointNet++、 VoxelNet、PointPillar、CenterPoint, Transfusionなどがある。

- 現在見ているのは3D点群特徴抽出ネットワーク PointPillarの構造図。
- 点群空間を複数の柱(ピラー)に分割し、それぞれの柱に含まれる点の特徴をその柱の特徴として利用する。
- 点群空間をD*P*N次元のベクトルに分割する。ここで、Dは1つの点の特徴の次元数(9次元)。Nは1つの柱に含まれる点の最大数です(100)。 Pは空間全体の柱の総数(12000)
- Dは9次元のベクトルです、各成分は以下の通り:x、y、z:点の座標。 xc、yc、zc 柱の中心点の座標。 xp yp 点が柱中心点からの偏移。 r は反射強度
- Pは通常12000、1つの3D空間を12000の柱で表現する。
- Nは通常100、1つの柱には最大100点を含まれている。
- D*N*P次元のベクトルをP*C次元のベクトルに圧縮する。つまり、3D空間をP個柱に分割して、各柱をC次元のベクトルで表現する。
- PointPillarの入力データは3D点群データ、出力はH*W*C次元の疑似画像特徴。
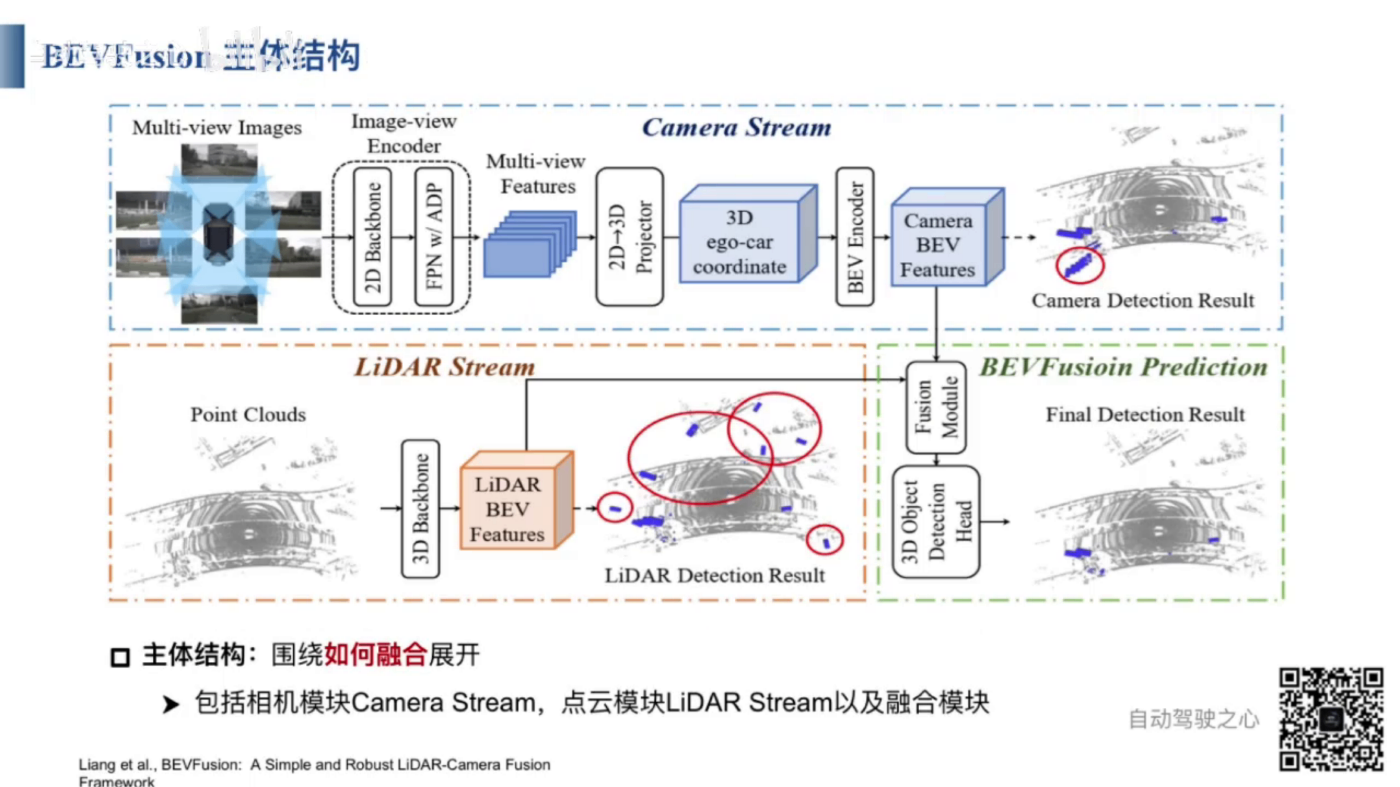

- Fusionモジュールの入力 画像BEV特徴と点群BEV特徴 出力 融合した特徴
- 点群BEV特徴と画像BEV特徴をチャネル次元で連結して、その後畳み込みネットワークにっよて連結後の特徴を抽出する。
- グローバル平均プーリングと畳み込みによる予測を用いて、連結特徴の適応的な選択を実現する(チャンネル注意機構)
- ネットワークが自動的に画像BEV特徴と点群BEV特徴の重みを割り当てる。


- MIT BEVFusion


Discussion