Raspberry Pi Pico WでBLE通信を使ってみる(micropython)
はじめに
Raspberry Pi Pico WでBLE通信を実践してみたので、まとめてみました
対象とする読者
以下の条件を満たしている人向けです(中級者向け?)
そのため、細かい用語は解説しません
- Raspberry Pi Pico Wの基本的な使い方が分かる
- programの書き込み・実行
- micropythonのコードが読める(ライブラリの使い方など)
- BLE関連用語(Central, Peripheral等)
動作環境
書き込み用PC
- Thonny:4.1.4
Raspberry Pi Pico W
- micropython:v1.22.2
※aiobleを使うにはv1.17以上が必須
1. プログラムの作成
micropython公式のコードを流用して、以下の変更を加えます
- Central側:受信した温度センサ値をplotする
- Peripheral側:変数tの値を、内臓温度センサ値にする
ライブラリは、「aioble」を使用します(以下、Githubです)
1.1 central側(受信側)のプログラム
examples/temp_client.py を改変して作ります
プログラムと適当な解説コメントを記載しておきます(未来の自分向け)
from micropython import const
import uasyncio as asyncio
import aioble
import bluetooth
import struct
# UUIDの定義
_ENV_SENSE_UUID = bluetooth.UUID(0x181A) # org.bluetooth.service.environmental_sensing
_ENV_SENSE_TEMP_UUID = bluetooth.UUID(0x2A6E) # org.bluetooth.characteristic.temperature
# Helper to decode the temperature characteristic encoding (sint16, hundredths of a degree).
def _decode_temperature(data):
"""
受信したデータを、温度センサ値にデコードする関数
具体的には、以下のことを行っている
・binaryをバイトに変換(unpack)
・温度センサ値を1/100する
Peripheral側のコードにある_encode_temperature関数 と対の関係になる
"""
return struct.unpack("<h", data)[0] / 100
async def find_temp_sensor():
# 5秒間、周辺のAdvertiseをスキャン
async with aioble.scan(5000, interval_us=30000, window_us=30000, active=True) as scanner:
async for result in scanner:
# 目的の端末(「名称がmpy-temp」かつ「サービスに環境センシングが含まれている」)の場合、デバイス情報を返す
if result.name() == "mpy-temp" and _ENV_SENSE_UUID in result.services():
return result.device
return None
async def main():
device = await find_temp_sensor()
if not device: # 目的の端末が見つからなかった場合
print("Temperature sensor not found")
return
# 目的の端末が見つかった場合、以下の処理も実行される
try:
print("Connecting to", device)
connection = await device.connect() # 端末に接続を試みる
except asyncio.TimeoutError:
print("Timeout during connection") # 接続がTimeoutErrorとなった場合
return
# device.connect()が成功した場合、以下の処理も実行される
async with connection:
try:
temp_service = await connection.service(_ENV_SENSE_UUID) # 環境センシングのサービス
temp_characteristic = await temp_service.characteristic(_ENV_SENSE_TEMP_UUID)
except asyncio.TimeoutError:
print("Timeout discovering services/characteristics")
return
# キャラクタリスティックが取得できた場合、以下の処理も実行される
while True:
temp_deg_c = _decode_temperature(await temp_characteristic.read()) # 受信データから温度センサ値を復元
print("Temperature: {:.2f}".format(temp_deg_c)) # Thonnyのplotterに表示する
await asyncio.sleep_ms(1000) # 1000ms一時定理
asyncio.run(main())
受信した温度センサ値をplotする
print文を1行追加するだけです。 ラクラク~
while True:
temp_deg_c = _decode_temperature(await temp_characteristic.read())
print("Temperature: {:.2f}".format(temp_deg_c)) # 追加したコード
await asyncio.sleep_ms(1000)
1.2 Peripheral側(送信側)のプログラム
examples/temp_sensor.py を改変して作ります
こちらも、プログラムと適当な解説コメントを記載しておきます(需要は不明)
from micropython import const
import uasyncio as asyncio
import aioble
import bluetooth
import struct
# UUIDの定義等
_ENV_SENSE_UUID = bluetooth.UUID(0x181A) # org.bluetooth.service.environmental_sensing
_ENV_SENSE_TEMP_UUID = bluetooth.UUID(0x2A6E) # org.bluetooth.characteristic.temperature
_ADV_APPEARANCE_GENERIC_THERMOMETER = const(768) # org.bluetooth.characteristic.gap.appearance.xml
_ADV_INTERVAL_MS = 250_000 # Advertiseの送信頻度(ms)
# GATTサーバの登録
temp_service = aioble.Service(_ENV_SENSE_UUID) # サービスの定義
temp_characteristic = aioble.Characteristic(
temp_service, _ENV_SENSE_TEMP_UUID, read=True, notify=True
) # 温度キャラクタリスティックの設定(読み出し・通知可能)
aioble.register_services(temp_service) # サービスの登録(環境センシング)
# 追加分
sensor_temp = machine.ADC(4) # 内臓温度センサ値取得用のPINを定義
conversion_factor = 3.3 / (65535) # 変換式の係数を事前に計算
# 追加分 内臓温度センサ値を取得
def _read_temperature():
reading = sensor_temp.read_u16() * conversion_factor
temperature = 27 - (reading - 0.706)/0.001721
return temperature
def _encode_temperature(temp_deg_c):
"""
温度センサ値を、送信用のフォーマットにエンコードする関数
具体的には、以下のことを行っている
・温度センサ値を100倍(整数値にする)
・バイト列をbinaryに変換(pack)
Central側のコードにある_decode_temperature関数 と対の関係になる
"""
return struct.pack("<h", int(temp_deg_c * 100))
async def sensor_task():
"""
送信する温度センサ値を更新する関数
・温度センサ値を読み取り
・キャラクタリスティックに書き込み
・1000ms一時停止
"""
# t = 24.5 # ここは削除
while True:
# t += random.uniform(-0.5, 0.5)
t = _read_temperature() # 実際の内臓温度センサ値を使用
temp_characteristic.write(_encode_temperature(t))
await asyncio.sleep_ms(1000)
async def peripheral_task():
"""
接続するまでadvertiseを送信
接続した場合、つながったCentral端末のMacアドレスを表示
接続が切れるまで、待つ(await)
"""
while True:
async with await aioble.advertise(
_ADV_INTERVAL_MS,
name="mpy-temp",
services=[_ENV_SENSE_UUID],
appearance=_ADV_APPEARANCE_GENERIC_THERMOMETER,
) as connection:
print("Connection from", connection.device)
await connection.disconnected()
async def main():
"""
2つのタスクをasyncで動かす関数
t1(task1):温度センサ値の更新タスク
t2(task2):Peripheralとしてのタスク(centralとの接続等)
"""
t1 = asyncio.create_task(sensor_task())
t2 = asyncio.create_task(peripheral_task())
await asyncio.gather(t1, t2)
asyncio.run(main())
1.2.1 温度センサ値取得の準備
pico Wの内臓温度センサ値は、pin4を使用して取得可能
ADCで電圧値を読み取り、温度値に変換します
# 追加分
sensor_temp = machine.ADC(4) # 内臓温度センサ値取得用のPINを定義
conversion_factor = 3.3 / (65535) # 変換式の係数を事前に計算
# 追加分 内臓温度センサ値を取得
def _read_temperature():
reading = sensor_temp.read_u16() * conversion_factor
temperature = 27 - (reading - 0.706)/0.001721
return temperature
Peripheral側のプログラムは、PCに接続した状態で使用するため、書き込まなくてOKです。
1.2.2 温度値をtaskで変数tに書き込む
先ほど追加した_read_temperature()関数の値を、変数tに代入するようにします
(元のコードの一部をコメントアウトしてます)
# This would be periodically polling a hardware sensor.
async def sensor_task():
# t = 24.5
while True:
# t += random.uniform(-0.5, 0.5)
t = _read_temperature() # 実際の内臓温度センサ値を使用
temp_characteristic.write(_encode_temperature(t))
await asyncio.sleep_ms(1000)
Peripheral側は、モバイルバッテリーで駆動させるため「main.py」というファイル名で書き込みしておきます
これで、準備完了です。
2. 実際に動かす
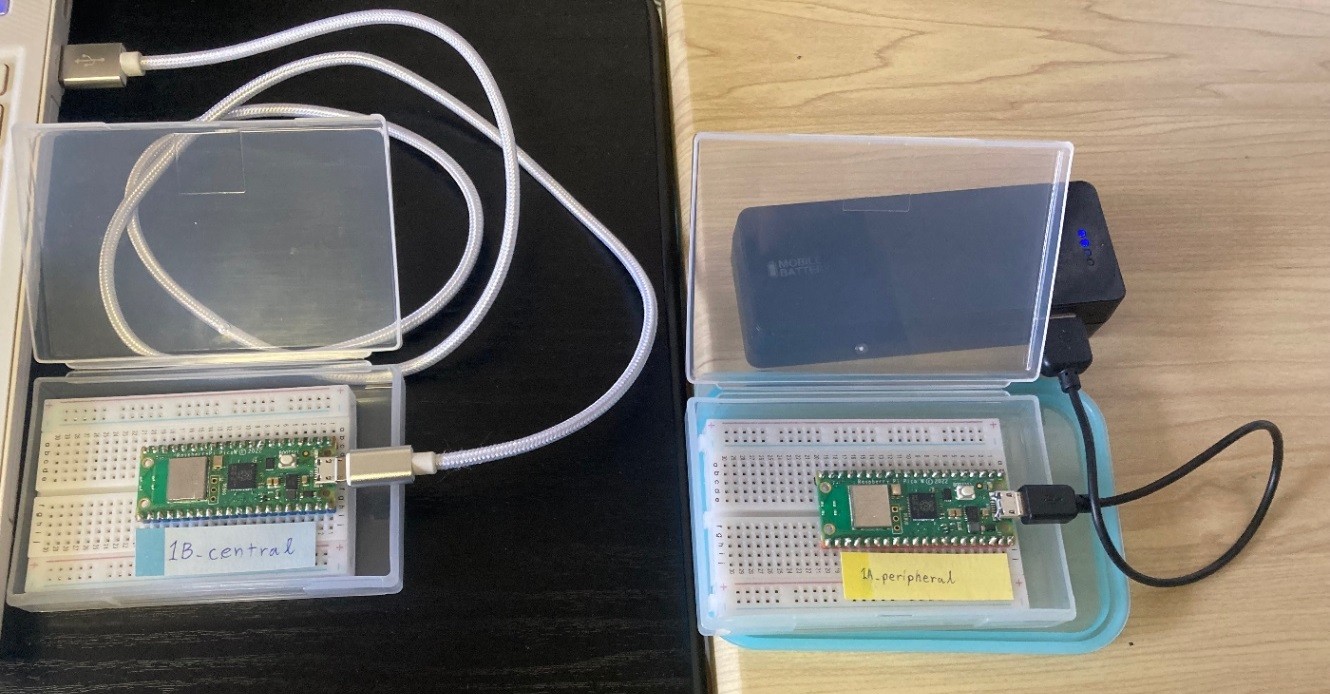
実行前の配線等を確認しておきます
- (右)Peripheral側の端末:モバイルバッテリーでmicroUSB経由で給電
- (左)Central側の端末:PCにUSB経由で接続し、Thonnyから実行する
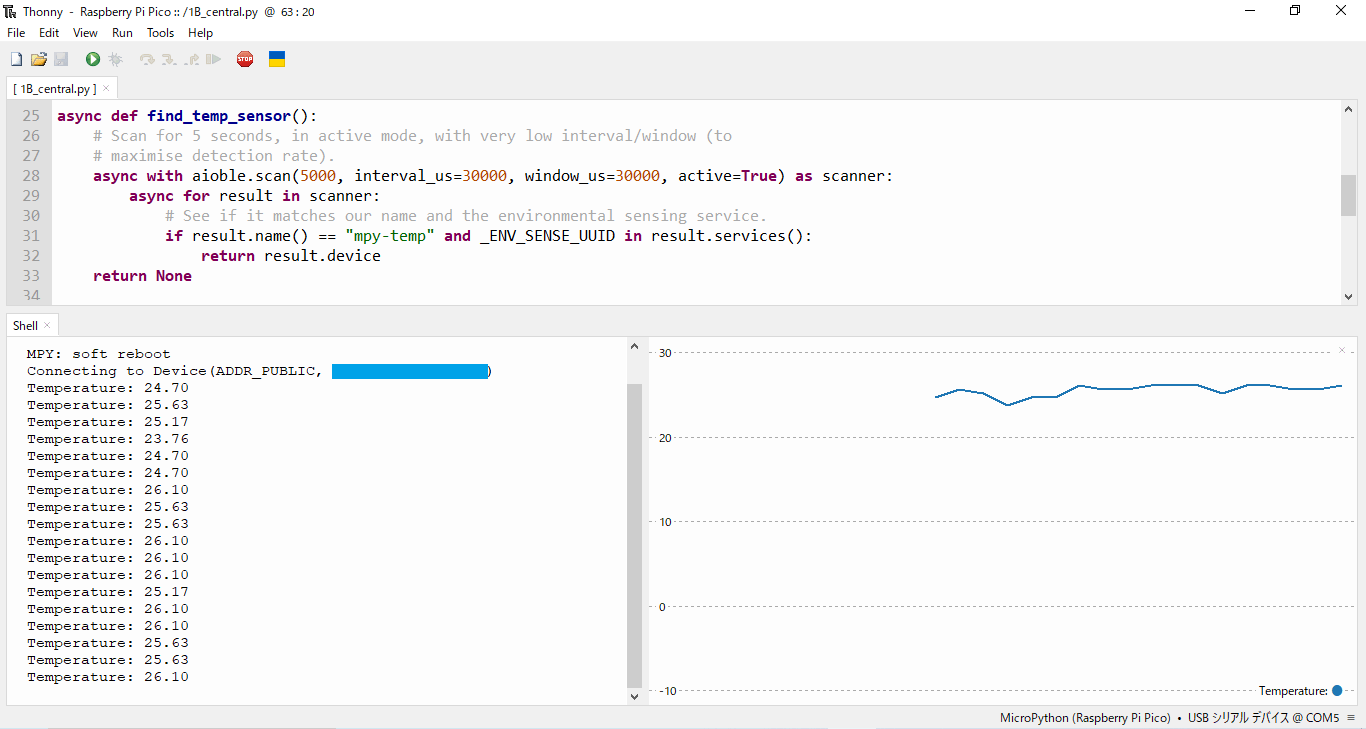
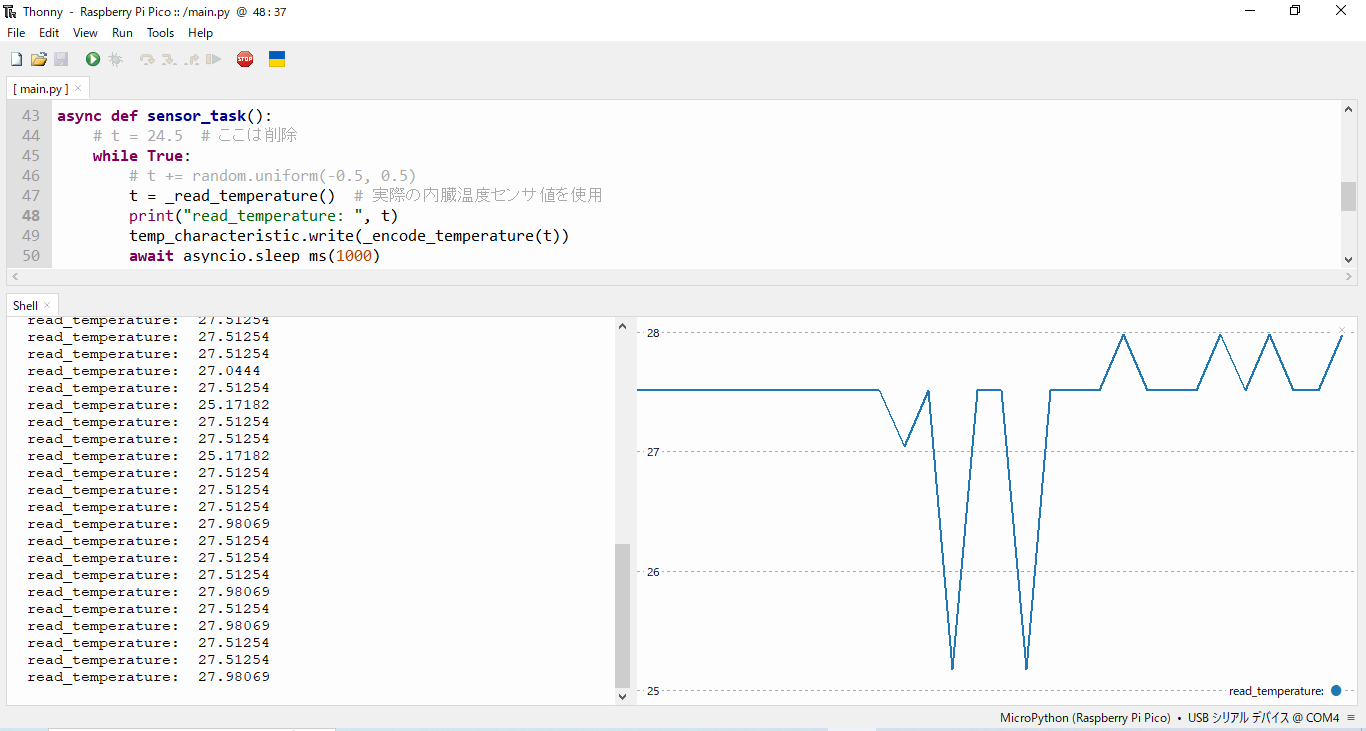
2.1 実行結果
PC側のThonnyのplot画面に、Peripheralから送付された温度センサ値がグラフとして表示されました
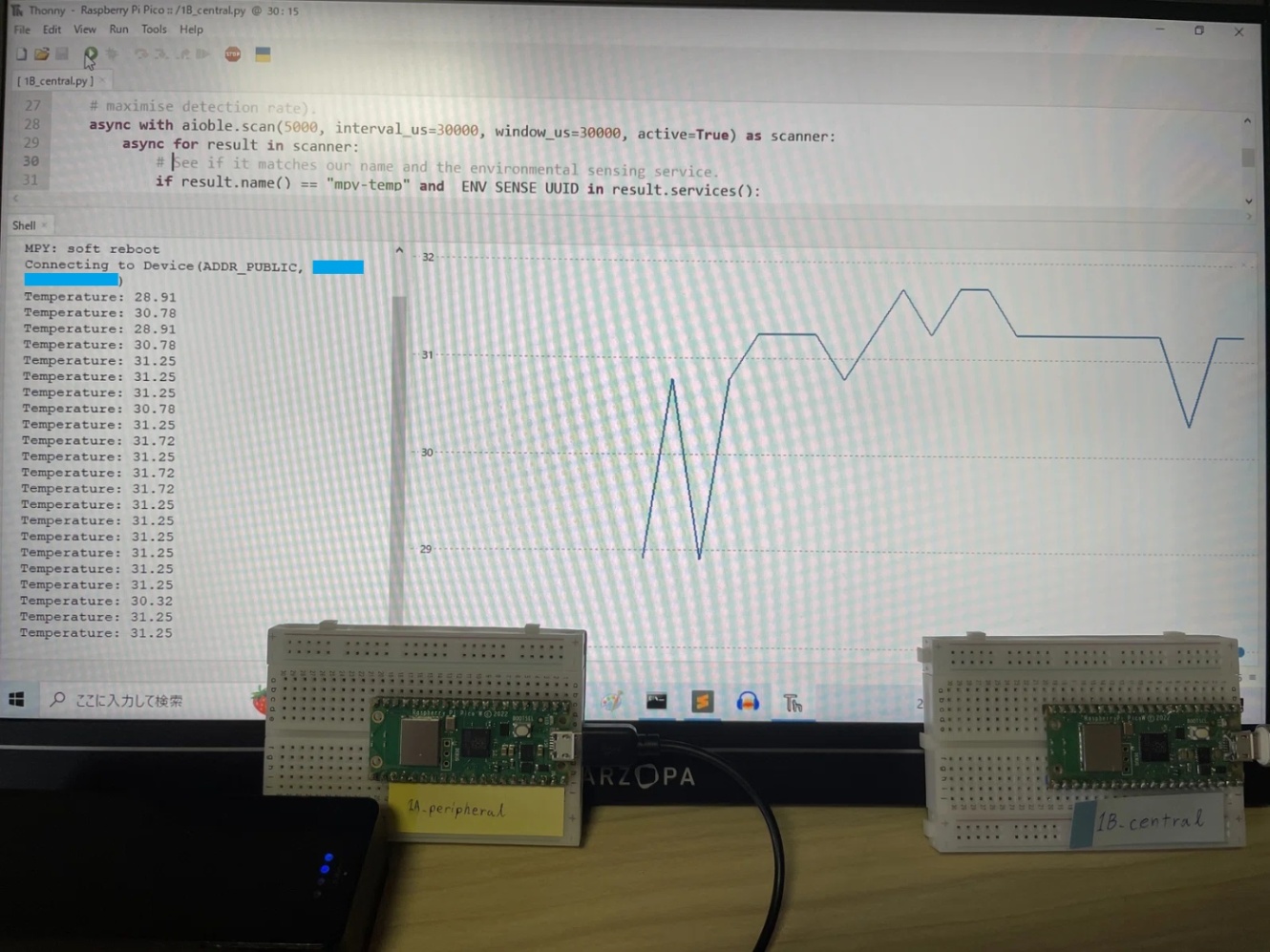
念のため、実物の画面も載せておきます
3. 動かしてみて気が付いたこと
実際に動かしてみて気が付いた課題を記載しておきます
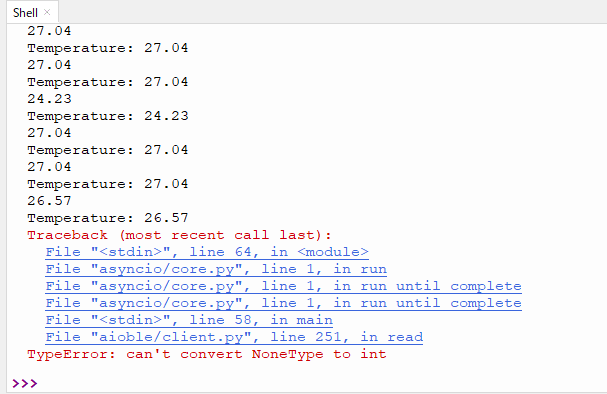
3.1 たまにErrorが発生する
下記のようにCentral側のプログラムにてTypeErrorが発生することがある。
実際に使用する際はTry-Except等で復帰できるように対処したほうがよさそう。
Error時の出力(Peripheral側)
「CancelledError:」というものが発生する
Error時の出力(Central側)
「TypeError: can't convert NoneType to int」が発生する
3.2 内臓温度センサの精度は低い
(これは公式も言ってることですが)pico Wの内臓温度センサはそんなに精度良くないです
値が飛ぶこともあります(突発的に25℃くらいまで下がったりしている)
まとめ
- Raspberry Pi Pico WのBLE通信のサンプルコードを(ちょっと変えて)動かしてみた
- aiobleは元のbluetoothライブラリよりも使いやすく、短いコードでBLE通信を行うことができる
- BLE通信の専門用語については、別途勉強する必要がある
- サービスの概念、キャラクタリスティック等、用語や概念を理解していないとプログラムを理解するのが難しい
Discussion