📘
加速度計測を用いずに物理的整合性を保ったラグランジュ制御モデルの学習
この記事では、機械学習分野の最新の arXiv 論文をもとに、
大まかな内容を日本語で分かりやすく解説し、その内容を4コマ漫画形式の画像として生成しています。
論文情報
- arXiv ID:
2512.03035v1- 著者: Ibrahim Laiche, Mokrane Boudaoud, Patrick Gallinari, Pascal Morin
- arXiv: https://arxiv.org/abs/2512.03035v1
- PDF: https://arxiv.org/pdf/2512.03035v1.pdf
📘 漫画でざっくり理解!
🧠 論文の内容をやさしく解説
ご提示いただいた論文について、専門外のエンジニアの方にも直感的に伝わるよう解説します。
論文の概要解説
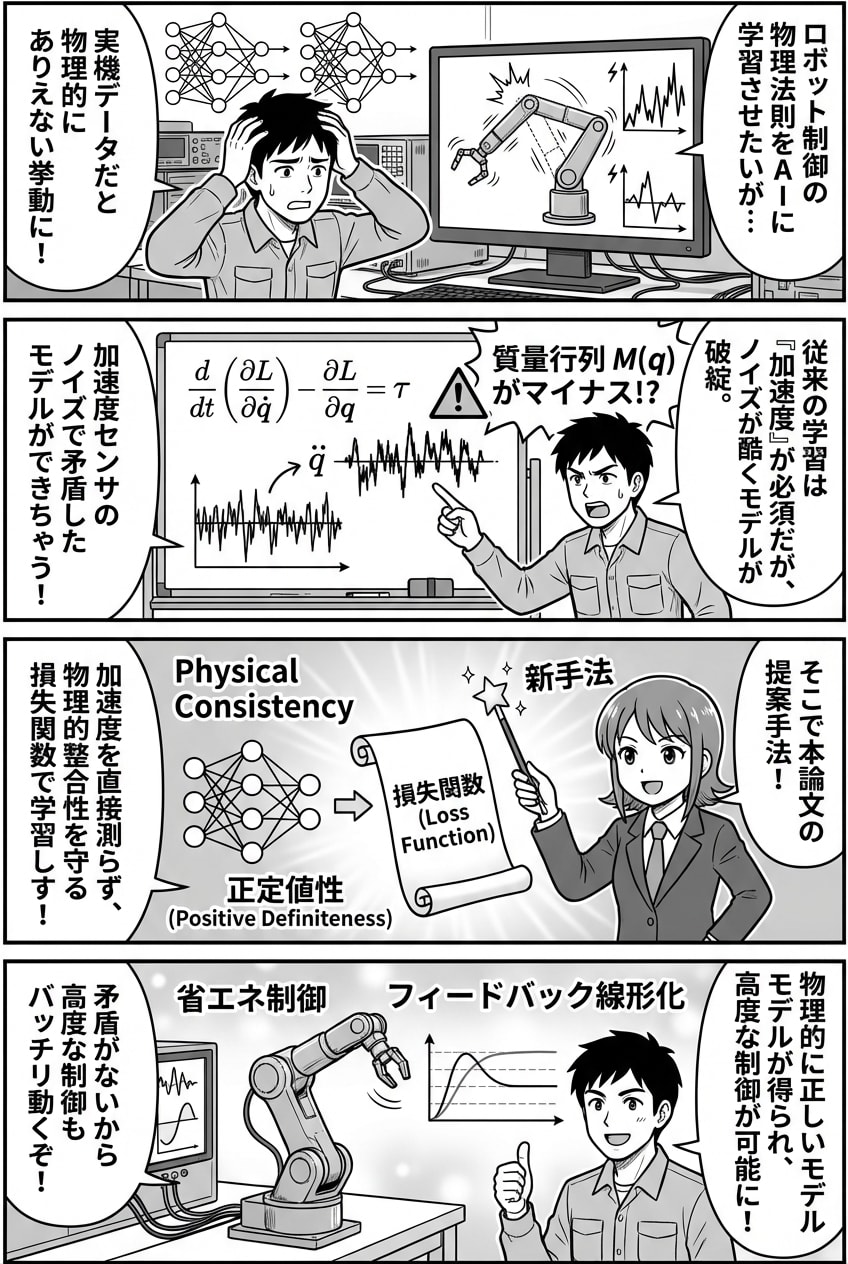
この論文は、ロボットアームなどの機械システム(ラグランジュ系)の動きを、AI(ニューラルネットワーク)を使って高精度にモデル化し、制御に応用する手法を提案しています。
【背景と課題】
近年、物理法則を組み込んだAI(ラグランジュ・ニューラルネットワークなど)が注目されています。しかし、実機データにはノイズが多く、AIが学習した結果、「質量が負になる」といった物理的にありえないモデルが出来上がってしまう問題がありました。また、学習に「加速度」のデータが必要な手法が多いですが、実機での加速度計測はノイズが激しく、精度低下の原因となっていました。
【提案手法】
著者は、加速度データを使わずに、位置と速度のデータだけで物理モデルを学習する新しい手法を開発しました。具体的には、物理的な整合性(エネルギー保存則や質量の正定値性など)を強制する特殊な「損失関数(AIの学習目標)」を設計しました。
【成果とメリット】
これにより、ノイズの多い限られたデータからでも、物理法則に矛盾しない正しいモデルを学習できるようになりました。さらに、このモデルを使うことで、従来の制御理論(エネルギーベース制御など)を実機に適用し、高精度な制御が可能であることを実証しました。
本研究のポイント
-
加速度計測が不要
- ノイズが乗りやすい加速度センサや微分計算に頼らず、位置と速度だけで学習可能です。
-
「物理的に正しい」モデルを保証
- AIが物理法則を無視した挙動(物理的整合性の欠如)を学習するのを防ぎます。
-
実機制御への応用
- 単なるシミュレーション予測だけでなく、実際にこのモデルを使ってロボット等を精密に制御できることを示しました。
※ この漫画画像は Google Gemini(Nano Banana Pro)で自動生成しています。
Discussion