Three.js Cannon.es 調査資料 - Constraint確認/LockConstraint
この記事のスナップショット
LockConstraintの挙動
ソース
動かし方
- ソース一式を WEB サーバ上に配置してください
- マウス操作 .. カメラ位置の変更
概要
- LockConstraintの挙動を確認します。
CANNON の制約(constraint)
物理エンジン Cannon.es において古典力学のふるまい、とりわけ2つの物体の動きを制限するものとして下記があります。
| クラス名 | 説明・例 |
|---|---|
| Spring | バネ |
| DistanceConstraint | 中心同士を一定の長さで固定。 |
| PointToPointConstraint | 点結合。振り子。 |
| LockConstraint | 点で固定。 |
| HingeConstraint | 軸結合。扉のちょうつがい。回転モーター。 |
| ConeTwistConstraint | 軸結合+ひねり。ragdoll の関節。 |
残念ながら平行移動(slider)はサポートされてないようです。
今回は LockConstraint について取り上げます。
やったこと
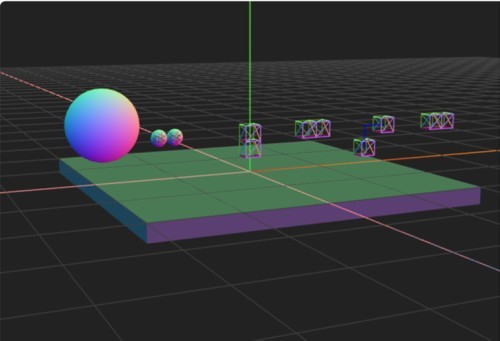
まず5つの状態を用意しました。
- 球同士を横につなぐように、側面に結合位置をおく .. 左から1つ目(左端)
- 立方体を上下につなぐように、片方の底面と片方の上面に結合位置をおく .. 左から2つ目
- 立方体を左右につなぐように、側面に結合位置をおく .. 左から3つ目(中央)
- 立方体を左右につなぎつつも、側面から離れた位置でに結合する .. 左から4つ目
- 立方体を左右につなぐように、側面に結合位置をおく。ただし初期位置を適当+外力を与えておく .. 左から5つ目(右端)
LockConstraint の使い方は、繋ぎたい2つのオブジェクトを指定します。さらに結合する点の位置を指定したときは pivotA, pivotB にそれぞれのオブジェクトの相対位置で指定します。
下記では1番目(球を横につなげる)の例を示します。ここではアンカー(固定)となるmoObj1ABodyの表面 [-radius, 0, 0] の位置ともう1つのオブジェクトmoObj1BBodyの表面 [radius, 0, 0] の位置で結合(固定)させます。
const radius = 1;
const moObj1AShape = new CANNON.Sphere(radius);
const moObj1ABody = new CANNON.Body({mass: 0, shape: moObj1AShape, position: new CANNON.Vec3(-10, 5, 0)});
world.addBody(moObj1ABody)
const viObj1AGeo = new THREE.SphereGeometry(radius, 6, 6);
const viObj1AMtr = new THREE.MeshNormalMaterial({wireframe: true});
const viObj1AMesh = new THREE.Mesh(viObj1AGeo, viObj1AMtr);
viObj1AMesh.position.copy(moObj1ABody.position);
viObj1AMesh.quaternion.copy(moObj1ABody.quaternion);
scene.add(viObj1AMesh);
//
const moObj1BShape = new CANNON.Sphere(radius);
const moObj1BBody = new CANNON.Body({mass: 1, shape: moObj1BShape, position: new CANNON.Vec3(-11, 4, 0)});
world.addBody(moObj1BBody)
const viObj1BGeo = new THREE.SphereGeometry(radius, 6, 6);
const viObj1BMtr = new THREE.MeshNormalMaterial({wireframe: true});
const viObj1BMesh = new THREE.Mesh(viObj1BGeo, viObj1BMtr);
viObj1BMesh.position.copy(moObj1BBody.position);
viObj1BMesh.quaternion.copy(moObj1BBody.quaternion);
scene.add(viObj1BMesh);
//
const moObj1Const = new CANNON.LockConstraint(moObj1ABody, moObj1BBody);
moObj1Const.pivotA = new CANNON.Vec3(-radius, 0, 0);
moObj1Const.pivotB = new CANNON.Vec3( radius, 0, 0);
world.addConstraint(moObj1Const);
1つ目の球の表面でつなげた場合、つなげた球が重力に引かれることなく、しっかりと横に固定されています。
2つ目の立方体を上下につなげた場合、ぴったりとつながってます。前回のPointToPointConstraintのときとはことなり、時間が経過しても回転する(ひねる)ことはありません。
3つ目の立方体を左右につなげた場合です。結合後に外力(下記applyImpulse)を加えてますが、しっかりと固定されています。
moBox3BBody.applyImpulse(new CANNON.Vec3(0, 1, 0), new CANNON.Vec3(0, 0, 1));
4つ目は距離をおいて立方体をつなげた場合です。接続方向がわかるよう補助線(青)を表示させてますが、固定されており動く気配はありません。
5つ目は立方体を横につなげた場合ですが、LockConstraint の maxForce(def=1e6)を超えた大きな外力(3e6)をかけている場合です。開始直後は離れていますが、つながろうとする強制力がすぐに働いて、くっついた状態になります。つながった後は微動だにしません。
次は HingeConstraint を扱います。
Discussion