Three.js Cannon.es 調査資料 - オフライン化(ライブラリのローカル配置)
この記事のスナップショット
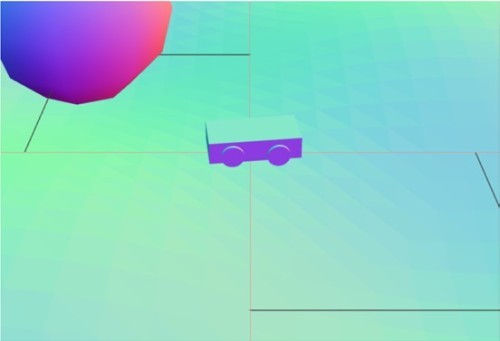
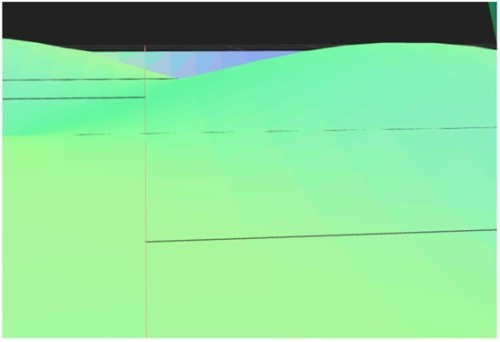
RaycastVehicleデモ画像
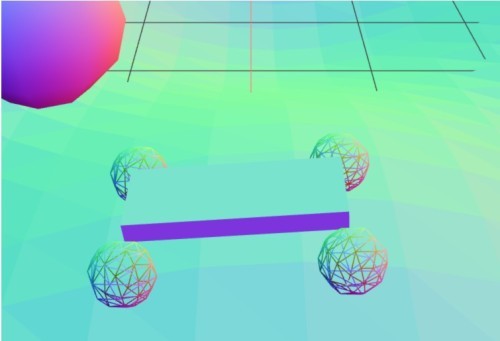
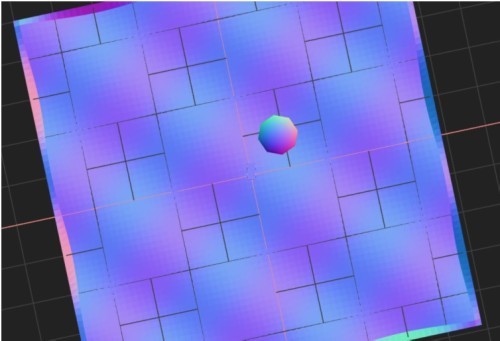
RigidVehicleデモ画像
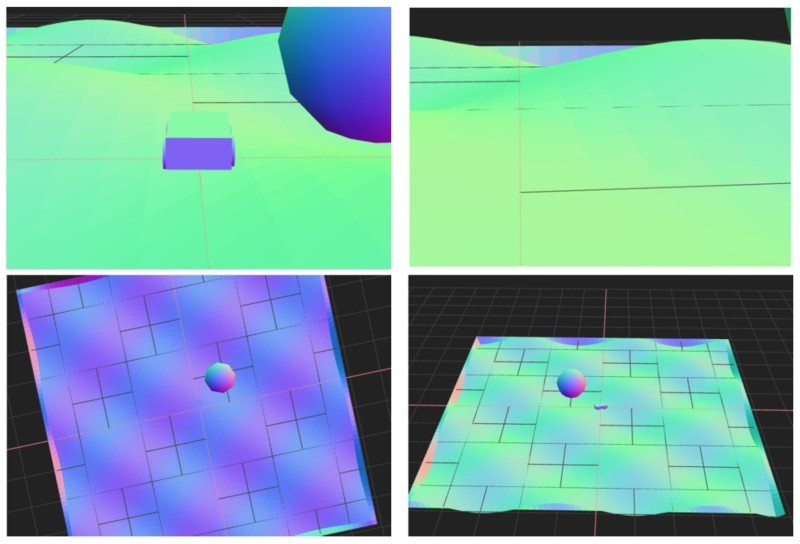
カメラ視点:バードビュー(左上)、フロントビュー(右上)、トップビュー(左下)、OrbitControls(右下)
ソース
動かし方
- ソース一式を WEB サーバ上に配置してください
- 車の操作法
- カーソル上 .. アクセル
- カーソル下 .. バック
- カーソル左、カーソル右 .. ハンドル
- 'b' .. ブレーキ
- 'c' .. カメラ視点の変更
- 'r' .. 姿勢を戻す
概要
- サンプルコードのオフライン化(ライブラリのローカル配置)
- 本質的な成分のみ残す(cannon, threee, OrbitControls 以外の demo.js等の排除)
- 機能追加(カメラ視点、姿勢修正)
- 目印追加
やったこと
cannonの物理エンジンにある 2つの車モデル、「Raycast vehicle」と「Rigid vehicle」
について、これらモデルの違いを探るべく、実装方法をそろえて見比べてみます。
大まかに次のような違いがあるようです。
| 項目 | Rigid vehicle | Raycast vehicle |
|---|---|---|
| 概要 | シンプルなモデル | より詳細なモデル |
具体的な違いを探るためにも、まずはコードを見るのですが、
実装方法が微妙に違っていて、モデル自体の違いがわかりにくくなってます。
手始めに、次の作業を行います。
-
オフライン化/ローカル化
- ライブラリが外部指定されており、毎回ネットワーク接続するのをやめたい
- 効率化のためローカルでも作業できるようhttpサーバを立ち上げる
-
本質的な成分のみ残す(cannon, threee, OrbitControls以外のdemo.js等の排除)
- demo.js で three.js に関する操作が隠蔽されており、便利な一方、汎用性に欠く
- テクスチャを貼ったり、ワイヤーフレーム表示するにはdemo.jsでは煩雑
- 基本動作を学習する意味も含め demo.js を使わず、three.js に関する処理をべた書きする
-
機能追加
-
自車のカメラ視点追加
- 車の挙動がよくわかるように、いくつかの視点を追加、切り替え可能とする
-
自車の姿勢修正
- 操作中の車がひっくり返るときの対応として、車の姿勢を戻すための処理。詳細は後述。
-
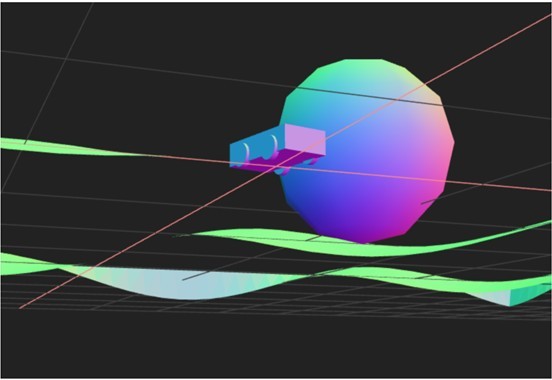
ボール(目印)追加
- 位置や大きさを確認するために配置したただの目印、ランドマーク。
-
座標軸
座標軸は任意に定めることができるようですが、
ここでは下記のとおりとします。
↑(画面上):y : 逆向き/下向きに重力
│
│
│____→ (画面右):x
/
/
(画面手前):z
カメラ(視線)も x-z平面を地面として、y軸正を上としています。
今後も基本この座標系になります。
自車のカメラ視点追加
カメラ視点として下記を追加します。
- バードビュー(車の後方・上空から正面に向けて)
- フロントビュー(ドライバー視点/車の中心位置から正面に向けて)
- トップビュー(上空から/車の前面が上に)
- OrbitControls の手動操作+自動回転
- OrbitControls の手動操作
バードビュー
バードビューは、カメラを車の後方・上空にもってきて、視点を車の位置にあわせます。
カメラ位置の計算は、カメラの相対位置(車の後方・上空)のベクトルに車の quaternion をかけ合わせることで、現在の車の向きに合わせた位置を求めることができます。カメラの相対位置は、車の初期の向きに関係し、作成時に x軸のマイナス方向を向いて作成しているので、x軸プラス方向が後方の位置になります。
var vposi = moVehicle.chassisBody.position;
var vquat = moVehicle.chassisBody.quaternion;
// 後背からビュー / 車の後方位置から正面に向けて
var vv = vquat.vmult(new CANNON.Vec3(23, 5, 0)); // 後方、高さ、左右
camera.position.set(vposi.x + vv.x, vposi.y + vv.y, vposi.z + vv.z);
camera.rotation.z = 0;
camera.lookAt(new THREE.Vector3(vposi.x, vposi.y, vposi.z));
フロントビュー
フロントビューは、カメラを車の中心位置にもってきて、視点を車の前方にあわせます。
視点の位置(車の前方)の計算は、視点の相対位置(前方位置)のベクトルに車の quaternion をかけ合わせることで求めることができます。
var vposi = moVehicle.chassisBody.position;
var vquat = moVehicle.chassisBody.quaternion;
// フロントビュー(ドライバー視点) / 車の中心位置から正面に向けて
camera.position.copy(new THREE.Vector3(vposi.x, vposi.y+2, vposi.z));
camera.rotation.z = 0;
var vv = vquat.vmult(new CANNON.Vec3(-20, 0, 0)); // 前方、高さ、左右
camera.lookAt(new THREE.Vector3(vposi.x + vv.x, vposi.y + vv.y, vposi.z + vv.z));
トップビュー
トップビューは、垂直に上空から車を眺めたものです。さらに進行方向(車の向き)を上にします。
車の向き(方位角)は車の quaternion から toEuler()から求めることができます。
カメラ位置は車の上空とし、視点は車の位置、車の向きに合わせてカメラの rotation を設定します。
var vposi = moVehicle.chassisBody.position;
var vquat = moVehicle.chassisBody.quaternion;
// トップビュー 上空から / 車の前面が上に
camera.position.set(vposi.x, vposi.y + 200, vposi.z);
camera.lookAt(new THREE.Vector3(vposi.x, vposi.y, vposi.z));
var veuler = new CANNON.Vec3(0, 0, 0);
vquat.toEuler(veuler);
var viecleRotY = veuler.y + Math.PI / 2; // X軸負の方向を向いて作成したので、上を向くよう90度ずらす
camera.rotation.z = viecleRotY;
OrbitControls の手動操作+自動回転

OrbitControls の手動操作+自動回転するには、autoRotate フラグを true とし、視点を OrbitControls.target に設定します。そして OrbitControls の操作を反映するには update() を呼び出します。
自動的に視点の位置が変わりますが、マウスのドラッグ操作やホイール操作で視点を変更することもできます。
var vposi = moVehicle.chassisBody.position;
orbitControls.autoRotate = true;
orbitControls.target = new THREE.Vector3(vposi.x, vposi.y, vposi.z);
orbitControls.update();
OrbitControls の手動操作
OrbitControls の手動操作には、autoRotate フラグを false とし、OrbitControls の update() を呼び出すだけになります。マウスのドラッグ操作やホイール操作で視点を変更できます。
orbitControls.autoRotate = false;
orbitControls.update();
自車の姿勢を戻す方法
車を操作しているとひっくり返ることがあり、そのときの姿勢を戻す方法を示します。
Raycast モデルの場合はプロパティの chassisBody の姿勢(position, quaternion)と速度(velocity, angularVelocity)を制御します。
// 車をひっくり返す ..
// 車を持ち上げ
moVehicle.chassisBody.position.y += 5;
// 進行方向(回転角Y)を使い、方向を初期化
var vquat = moVehicle.chassisBody.quaternion;
var veuler = new CANNON.Vec3(0, 0, 0);
vquat.toEuler(veuler);
var ry = veuler.y;
const carInitQuat = new CANNON.Quaternion();
carInitQuat.setFromAxisAngle(new CANNON.Vec3(0, 1, 0), ry);
moVehicle.chassisBody.quaternion.copy(carInitQuat);
// 速度、角速度を初期化しておく
moVehicle.chassisBody.velocity = new CANNON.Vec3(0, 0, 0);
moVehicle.chassisBody.angularVelocity = new CANNON.Vec3(0, 0, 0);
系が x-z 平面で、y軸方向に重力がかかっているので、垂直方向(y軸方向)に車を持ち上げます。
車の向きを quaternion から取得して、方向だけを quaternion に再度設定します。
車の向き(方位角)は quaternion の toEuler() の y 成分から取得できます。
改めてY軸周りに方位角で回転させた quaternion を chassisBody に設定します。
さらに、速度(velocity)、角速度(angularVelocity)を 0 にすることで動きを停止させます。
一方で Rigid モデルの場合は次のようにします。
// 車をひっくり返したいけど、シャーシ・ホイルを同時に指定する必要あり。面倒なので保留に
// 車を持ち上げ
var upY = 5;
vehicle.chassisBody.position.z += upY;
for (var i = 0; i < 4; ++i) {
vehicle.wheelBodies[i].position.z += upY;
}
// 片方だけに力を加えてみる
var vquat = vehicle.chassisBody.quaternion;
var veuler = new CANNON.Vec3(0, 0, 0);
vquat.toEuler(veuler);
var ry = -veuler.y;
var fy = new CANNON.Vec3(0, 20, 0); // 上向きの力のベクトル
var pz, px;
var cos_ry, sin_ry;
cos_ry = Math.cos(ry);
sin_ry = Math.sin(ry);
// .. 車の左前方、上向きに力を加える
pz = 5*cos_ry + 2*sin_ry;
px = -5*sin_ry + 2*cos_ry;
vehicle.chassisBody.applyImpulse(fy, new CANNON.Vec3(px, 0, pz));
// .. 車の左後方、上向きに力を加える
pz = 5*cos_ry -2*sin_ry;
px = -5*sin_ry -2*cos_ry;
vehicle.chassisBody.applyImpulse(fy, new CANNON.Vec3(px, 0, pz));
Rigid モデルではシャーシ(本体)とホイール(タイヤ)が一体になっていないようです。
シャーシだけを移動、回転させてもホイールが置き去りになるようです。
ホイールの相対位置を再計算して正しい位置に配置しないと、次の瞬間にシャーシとホイールを接続する制約が働き、離れた位置から無理やりくっつくような動きなり、時におかしな位置にくっつく場合があります。
相対位置を再計算するのは面倒なので、垂直に平行移動(上方に移動)して、車を回転させるような衝撃をシャーシに加えて、回転させます。
パッと見、シャーシの片方が跳ねあがって姿勢を戻す、アクロバットな動きをしますが、下手に位置を再計算するよりも「安定した姿勢の戻し方」なようです。
Discussion